Navigating Ryze Tello Drones With MATLAB App
v1.1.1
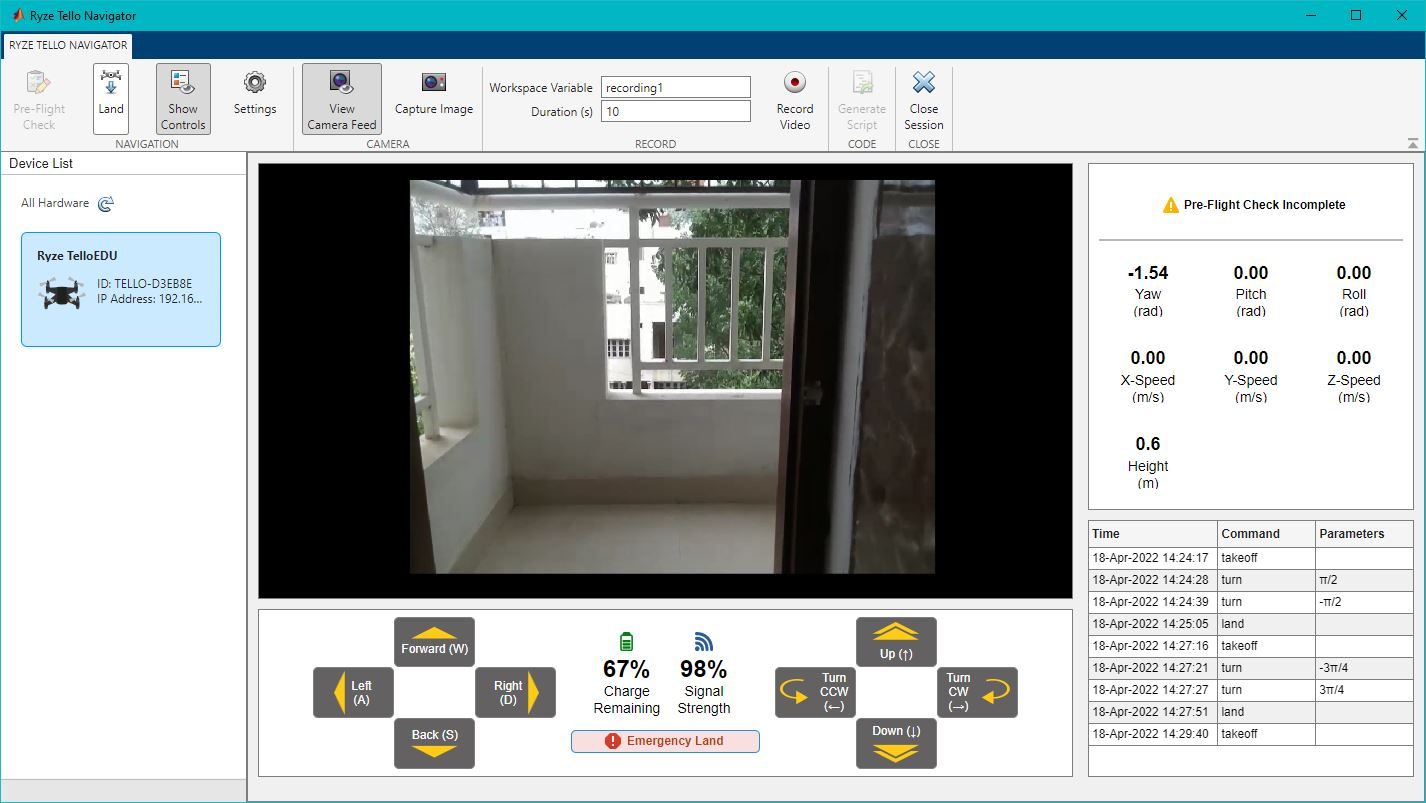
Zur interaktiven Steuerung einer Ryze® Tello-Drohne, die mit Ihrem Computer mit MATLAB® verbunden ist, bietet MathWorks® eine MATLAB-App – Ryze Tello Navigator. Diese App hilft Ihnen dabei:
Sehen Sie sich alle Ryze Tello-Drohnen an, die mit dem WLAN-Netzwerk des Computers verbunden sind.
Führen Sie den Start/die Landung einer Drohne durch.
Steuern Sie die Navigation der Drohne über die Tastatur oder die Navigationssteuerungstasten in der App.
Sehen Sie sich den Kamera-Feed in der Vorschau an und nehmen Sie Bilder auf.
Zeichnen Sie den Video-Feed der Drohne in der MATLAB-Arbeitsbereichsvariablen auf.
Generieren Sie ein MATLAB-Skript für die abgeschlossene Navigation.
Installieren Sie MATLAB und das MATLAB-Supportpaket für Ryze Tello-Drohnen
Führen Sie die Ersteinrichtung und -konfiguration durch und stellen Sie eine Verbindung zu einer oder mehreren Ryze Tello-Drohnen her.
Laden Sie dieses Repository herunter oder klonen Sie es.
Navigieren Sie zum lokalen Repository-Ordner in MATLAB
Führen Sie die folgenden Befehle im MATLAB-Befehlsfenster aus:
addpath(pwd);
Speicherpfad;
Starten Sie die App, indem Sie den Befehl ryzeTelloNavigator ausführen.
Erfordert MATLAB-Version R2022a oder neuer
MATLAB®-Supportpaket für Ryze Tello®-Drohnen
Stellen Sie sicher, dass die in der Geräteliste angezeigte Drohne diejenige ist, die Sie mit der App steuern möchten. Wenn die Drohne nicht aufgeführt ist, führen Sie die Einrichtung und Konfiguration erneut durch.
| Schritt | Aktion | Ergebnis |
|---|---|---|
| 1 |  Klicken Sie in der Geräteliste auf den Namen der Drohne und dann oben im Abschnitt „Navigation“ auf „Vorflugkontrolle“ . Klicken Sie in der Geräteliste auf den Namen der Drohne und dann oben im Abschnitt „Navigation“ auf „Vorflugkontrolle“ . | Ein neues Dialogfeld mit der Bezeichnung „Checkliste vor dem Flug ausführen“ wird angezeigt. Alle anderen Bedienelemente in der App sind während der Vorflugkontrolle deaktiviert. Bei Fehlern enthält das Dialogfeld Links zu den erforderlichen Schritten zur Fehlerbehebung |
| 2 | Nachdem Sie überprüft haben, dass alle Vorflugprüfungen erfolgreich abgeschlossen wurden, klicken Sie auf OK. |  Die Meldung „Pre-Flight Check Completed“ wird auf der rechten Seite der App angezeigt. Alle anderen Steuerelemente sind ebenfalls aktiviert. Die Meldung „Pre-Flight Check Completed“ wird auf der rechten Seite der App angezeigt. Alle anderen Steuerelemente sind ebenfalls aktiviert. |
Mit dem Ryze Tello Navigator können Sie Start/Landung durchführen und die Ryze Tello-Drohne interaktiv steuern.
Hinweis : Bevor Sie mit dem Start der Drohne beginnen, beachten Sie die allgemeinen Sicherheitsvorkehrungen. Wenn Sie während des Starts oder während der manuellen Navigationssteuerung (wie in den folgenden Schritten erwähnt) Schäden an der Drohne und der Umgebung feststellen, können Sie auf „Notlandung“ klicken. Durch Klicken auf diese Schaltfläche wird eine Notabschaltung der Motoren der Drohne ausgelöst, wodurch diese aus der aktuellen Höhe auf den Boden fällt (für Tello EDU-Drohnen) oder die Drohne gezwungen wird, von ihrer aktuellen Position aus vertikal zu landen (für Tello-Drohnen).
| Schritt | Aktion | Ergebnis |
|---|---|---|
| 1 |  Überprüfen Sie, ob der Akkuladestand und die Signalstärke der Drohne, wie in der App angezeigt, für den Start und die Steuerung ausreichen. Überprüfen Sie, ob der Akkuladestand und die Signalstärke der Drohne, wie in der App angezeigt, für den Start und die Steuerung ausreichen. | |
| 2 |  Klicken Sie auf Kamera-Feed anzeigen, um zu überprüfen, ob der Kamera-Feed der Drohne ordnungsgemäß funktioniert. Klicken Sie auf Kamera-Feed anzeigen, um zu überprüfen, ob der Kamera-Feed der Drohne ordnungsgemäß funktioniert. | Die App zeigt die Vorschau an, wie sie die Kamera der Drohne vor dem Start sieht. Wenn sich die Drohne später bewegt, wird die Vorschau mit dem Live-Feed der Kamera aktualisiert. |
| 3 |  Drücken Sie entweder die Leertaste auf Ihrer Tastatur oder klicken Sie auf „Abheben“ , das im Abschnitt „Navigation“ im Toolstrip-Bereich angezeigt wird. Drücken Sie entweder die Leertaste auf Ihrer Tastatur oder klicken Sie auf „Abheben“ , das im Abschnitt „Navigation“ im Toolstrip-Bereich angezeigt wird. | Die Motoren der Drohne starten und die Drohne hebt auf eine bestimmte Höhe ab und schwebt an dieser Position. Die Starttaste wird durch die Landetaste ersetzt. |
| 4 | Führen Sie eine manuelle Navigation der Drohne über die App durch, indem Sie entweder auf die entsprechenden Symbole in der App klicken oder Ihre Tastatur verwenden. | Die Drohne bewegt sich entsprechend der von Ihnen ausgelösten Navigationssteuerung. Der Kamera-Feed (Vorschau) wird ebenfalls aktualisiert, sofern er aktiviert ist. Um den in der App angezeigten Bereich des Vorschaufensters zu vergrößern, können Sie den Bereich ausblenden, in dem Schaltflächen zur manuellen Steuerung angezeigt werden. Klicken Sie auf „Steuerelemente anzeigen“, um den Bereich zu deaktivieren. Sie können die Drohne weiterhin mit den Tastaturtasten steuern. |
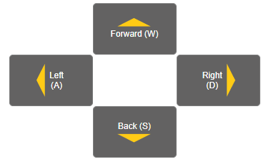
WASD-Schlüssel:
W – Vorwärts gehen
A – Nach links bewegen
S – Rückwärts bewegen
D – Nach rechts bewegen
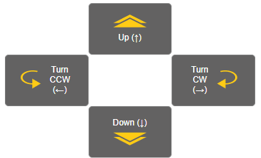
Pfeiltasten:
▲ – Bewegen Sie die Drohne nach oben
▼ – Bewegen Sie die Drohne nach unten
◄ – Drehen Sie die Drohne gegen den Uhrzeigersinn
► – Drehen Sie die Drohne im Uhrzeigersinn
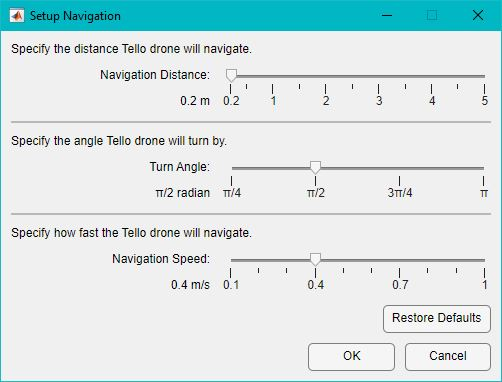
Sie können die Navigationseinstellungen ändern, die die Drohne jedes Mal verwendet, wenn Sie eine Bewegung in eine bestimmte Richtung auslösen. Klicken Sie auf „Einstellungen“ , um das Dialogfeld „Navigation einrichten“ zu öffnen, und geben Sie mithilfe der Schieberegler die Entfernungs-, Winkel- und Geschwindigkeitswerte an. Wenn Sie die Standardwerte (Navigationsentfernung: 0,2 m, Wendewinkel: π/2, Navigationsgeschwindigkeit: 0,4 m/s) wiederherstellen möchten, klicken Sie im Dialogfeld auf „Standardwerte wiederherstellen“ .

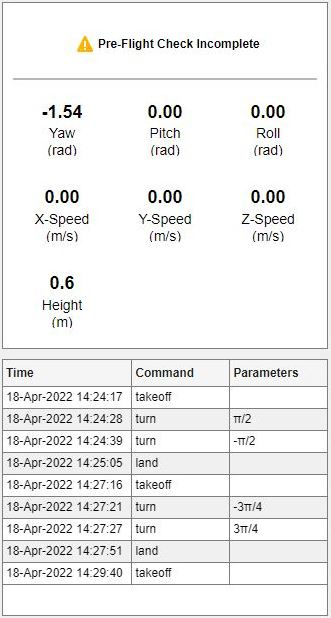
Die App zeigt außerdem die Live-Navigationsdaten (wie sie von den Sensoren der Drohne erfasst werden) sowie das Protokoll der Befehle an, die Sie über die Navigationstasten oder Tastaturtasten ausgelöst haben. Diese Informationen werden im rechten Seitenbereich angezeigt.
Mit Ryze Tello Navigator können Sie Bilder und Videos aufnehmen, wie sie von der FPV-Kamera der Ryze Tello-Drohne gesehen werden.
| Schritt | Aktion | Ergebnis |
|---|---|---|
| 1 |  Nehmen Sie jeweils ein Bild auf. Nehmen Sie jeweils ein Bild auf. | Das Bild wird als Arbeitsbereichsvariable gespeichert. |
| 2 |  Definieren Sie die Arbeitsbereichsvariable und die Dauer für die Videoaufzeichnung und klicken Sie dann auf Video aufnehmen. Definieren Sie die Arbeitsbereichsvariable und die Dauer für die Videoaufzeichnung und klicken Sie dann auf Video aufnehmen. | Das Video der Kamera der Drohne wird für die angegebene Dauer aufgezeichnet. Klicken Sie auf „Stopp“, um die Aufnahme jederzeit während der Aufnahme zu stoppen. Das Video wird dann automatisch als Bildarray im Arbeitsbereich gespeichert. |
Ryze Tello Navigator hilft Ihnen, ein Live-Editor-Skript der von Ihnen durchgeführten Navigation zu erstellen. Mit diesem Skript können Sie die anfängliche Einrichtung und Flugbahn der Drohne definieren und dann benutzerdefinierte Algorithmen hinzufügen, um zusätzliche Arbeitsabläufe durchzuführen.

Klicken Sie dazu auf „Skript generieren“ , nachdem Sie die Drohne erfolgreich gelandet haben.
| Warnungen | Problem und empfohlene Maßnahme |
|---|---|
| Niedriger Batteriestand | Die App beginnt mit der Anzeige von Warnungen, wenn die Anzeige der verbleibenden Ladung einen Wert unter 20 % anzeigt und die Drohne fliegt oder schwebt. Sinkt der Akkustand unter 10 %, landet die Drohne automatisch von ihrer aktuellen Position. Um dies zu vermeiden, stellen Sie sicher, dass Sie die Drohne über die Schaltfläche „Landen“ in der App landen und anschließend den Akku der Drohne austauschen. |
| Geringe Signalstärke | Die App zeigt ständig die Signalstärkewerte an, während die Drohne fliegt. Es wird empfohlen, die erforderlichen Maßnahmen zu ergreifen, wenn die Signalstärke unter 20 % liegt, um einen Kontrollverlust über die Drohne zu vermeiden. Wenn die Verbindung zur Drohne unterbrochen wird, erscheint ein Dialogfeld mit der Option, die Verbindung zur Drohne wiederherzustellen. Wenn dies immer noch fehlschlägt, wird eine Fehlermeldung angezeigt. |
Die Lizenz für ist in der Datei LICENSE.TXT in diesem GitHub-Repository verfügbar.
MATLAB Central
Copyright 2022 The MathWorks, Inc.


