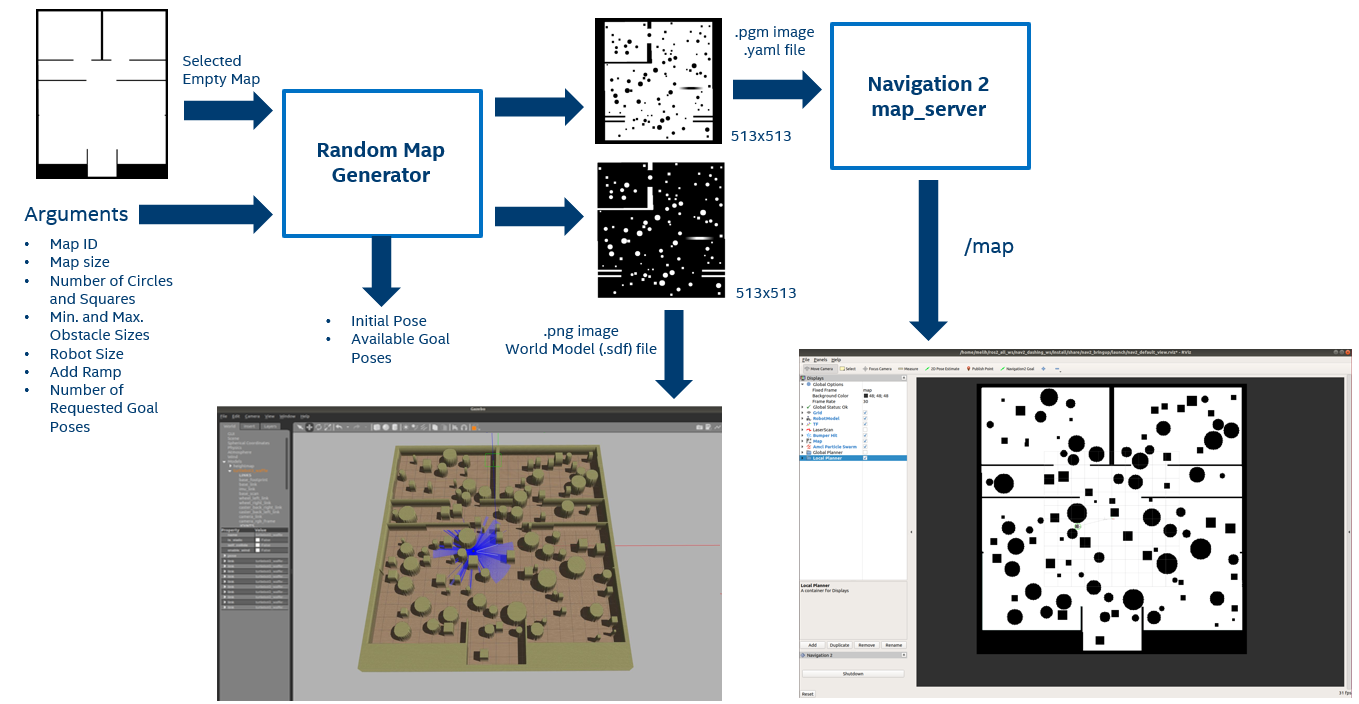
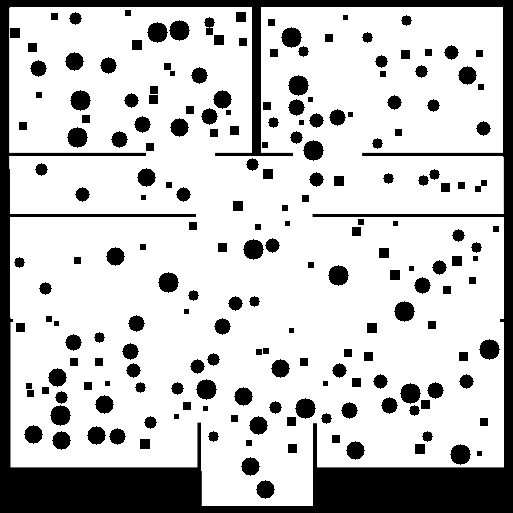
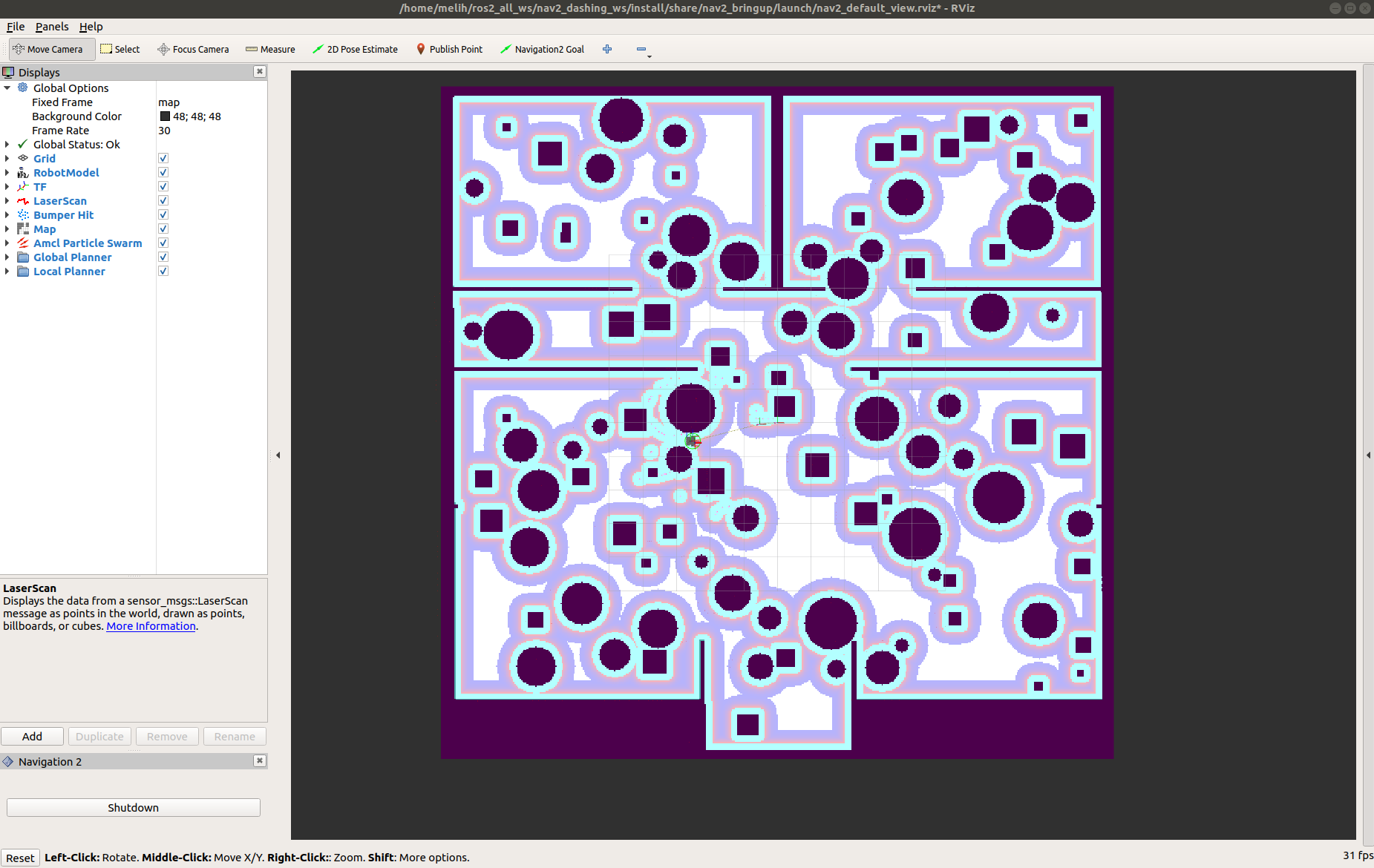
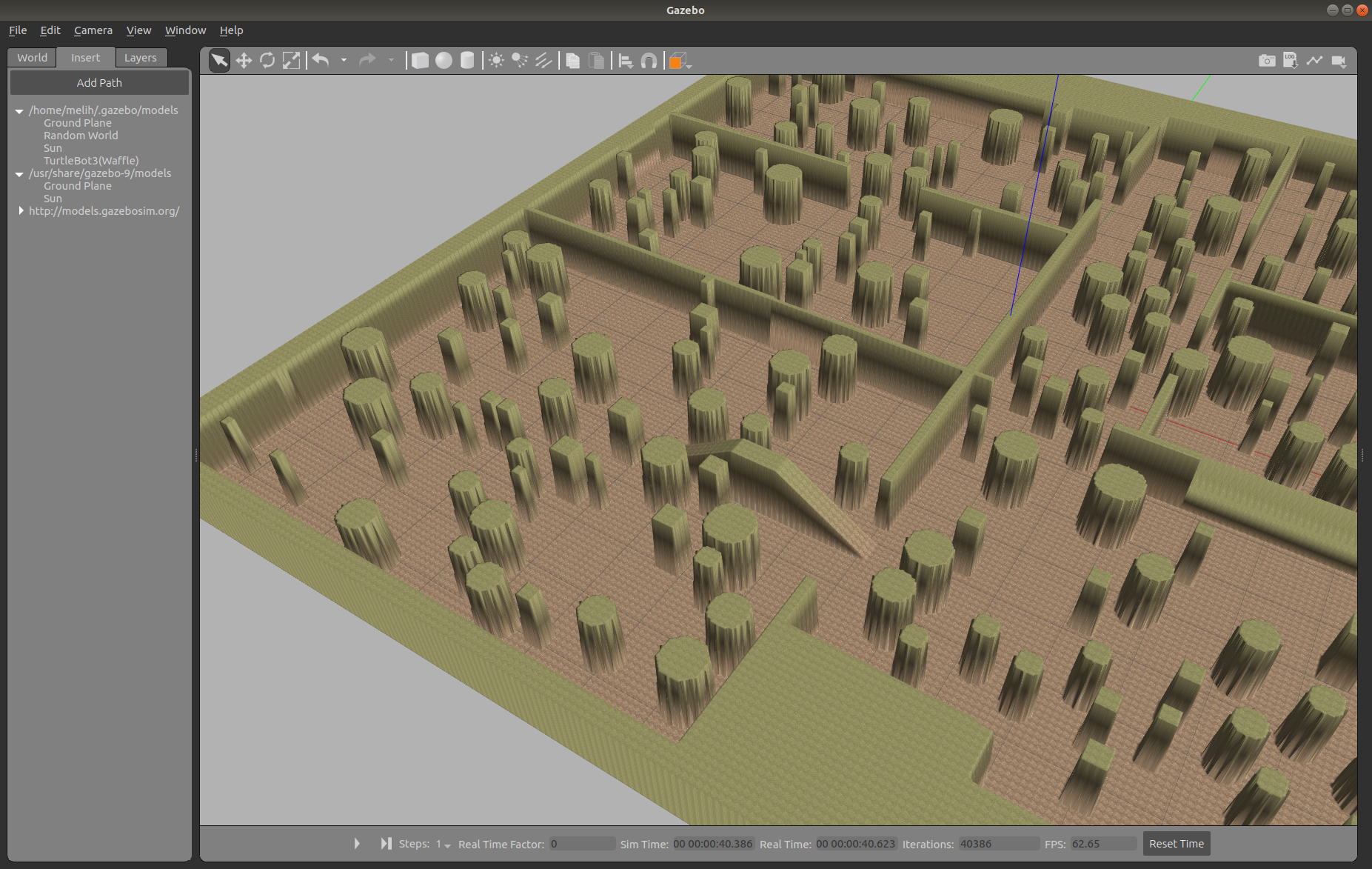
Dieses Tool erstellt zufällig generierte Karten und Weltmodelle, die von Navigation 2 und Gazebo verwendet werden können. Es verwendet einen kleinen Teil des HouseExpo-Datensatzes. Es handelt sich um einen Satz leerer, handgezeichneter 2D-Bilder für Innenräume. Die leeren Karten befinden sich im Kartenverzeichnis. Der Zufallskartengenerator platziert Hindernisse zufällig in Graustufenkarten. Die Karten müssen im PNG-Format vorliegen. Derzeit wird das Hinzufügen von Kreisen, Quadraten und Rampen unterstützt. Größe, Form, Art und Abstand zwischen Hindernissen können vom Benutzer konfiguriert werden. Mit der Gazebo-Höhenkarte wird ein Gazebo-Weltmodell einer zufällig generierten Karte erstellt. Das Verzeichnis random_world kann in das Verzeichnis .gazebo/model kopiert werden, um es mit Gazebo zu verwenden. Die generierte Kartengröße muss 2^n+1 x 2^n+1 betragen. Andernfalls funktioniert es nicht mit Gazebo. Die Größe des Weltmodells in Gazebo ist auf 20 x 20 Meter skaliert.
sudo apt-get update
sudo apt-get upgrade
Installieren Sie OpenCV
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install libopencv-dev
cd nav2_random_map_generator
make
oder
cd src
g++ circle.cpp main.cpp map.cpp obstacle.cpp ramp.cpp rmg.cpp square.cpp -o random-map `pkg-config --cflags --libs opencv`
./map_generator <Map Id> <Number_of_Circles> <Number_of_Squares> <Robot_Size (px*0.03898)> <Map_Size(x)> <Map_Size(y)> <Min_Circle_Radius> <Max_Circle_Radius> <Min Square_Size> <Max_Circle_Radius> <Add Ramp> <Show_Map>
Beispiel:
./map_generator 10 200 200 5 513 513 5 10 5 10 1 1
./map_generator h
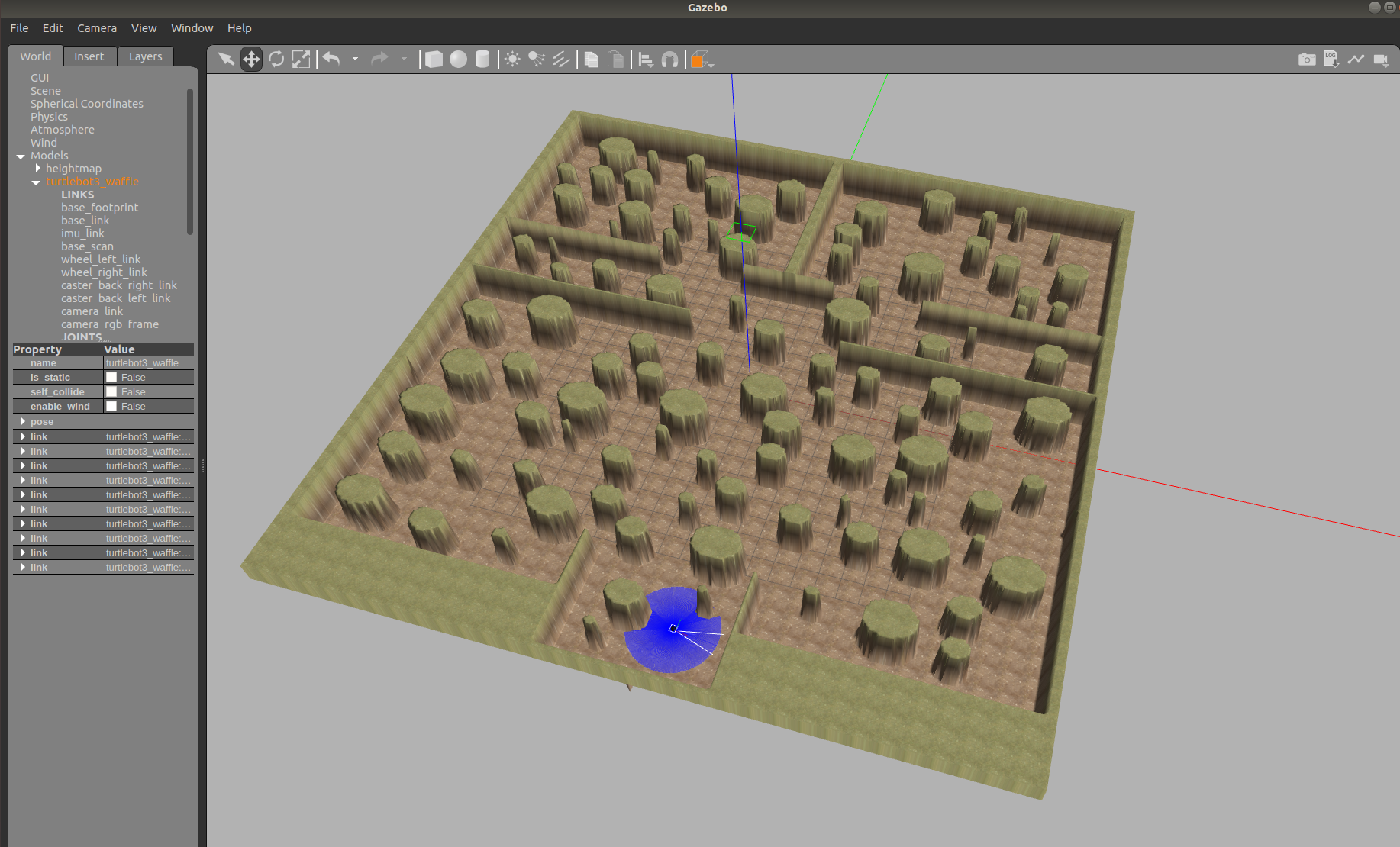
Ramdom Map TB3 Testvideo
Ramdom Map Ramp Testvideo


