open3d_slam
1.0.0
open3d_slam ist eine C++ (cpp)-Bibliothek für SLAM mit ROS-Integration.
Hauptkontakt: Edo Jelavic ([email protected])
Autoren: Edo Jelavic, Julian Nubert, Marco Hutter
Poster und Abstract: Link
Dokumentation: Link
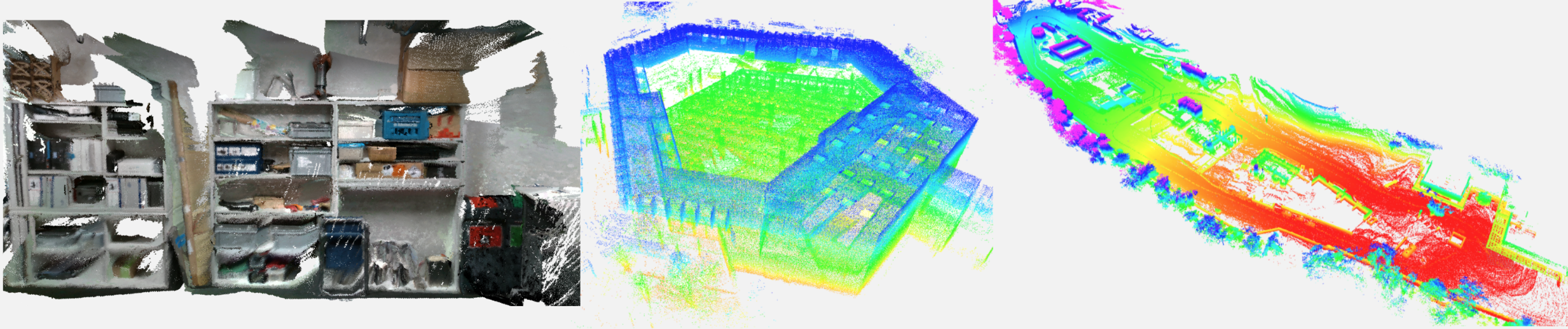
Der Hauptunterschied zwischen open3d_slam und anderen verfügbaren SLAM-Bibliotheken besteht darin, dass open3d_slam einfach gestaltet und für Bildungszwecke verwendet werden soll. Tatsächlich verwendet open3d_slam nur gut etablierte Algorithmen in ihrer Grundform. Wir hoffen, dass dadurch auch Neueinsteigern der Einstieg erleichtert wird. Es funktioniert mit Punktwolken, es sind keine zusätzlichen Eingaben wie IMU erforderlich. Open3D_slam kann eine Karte von Grund auf erstellen oder in einer bestimmten Karte lokalisieren. Die vorliegende Karte kann auch um neue Messungen erweitert werden.
Wir basieren unsere Implementierung auf Open3D, einer gut gepflegten und hochleistungsfähigen Bibliothek für die 3D-Datenverarbeitung.
Die Dokumentation und Beispieldatensätze finden Sie hier: open3d_slam-Dokumentation.
Wir stellen einen Catkin-Wrapper für Open3D bereit, damit Sie Open3D problemlos in Ihren ROS-Projekten verwenden können. Siehe Dokumentation in open3d_catkin/README.md.
Wenn Sie dieses Werk nützlich finden oder es für Ihre Recherche nutzen, denken Sie bitte darüber nach, das entsprechende Werk zu zitieren:
@inproceedings{jelavic2022open3d,
title={Open3D SLAM: Point Cloud Based Mapping and Localization for Education},
author={Jelavic, Edo and Nubert, Julian and Hutter, Marco},
booktitle={Robotic Perception and Mapping: Emerging Techniques, ICRA 2022 Workshop},
pages={24},
year={2022},
organization={ETH Zurich, Robotic Systems Lab}
}


