jetson nano baseboard
v1.4.6
Copyright (C) 2020-2024 Antmicro

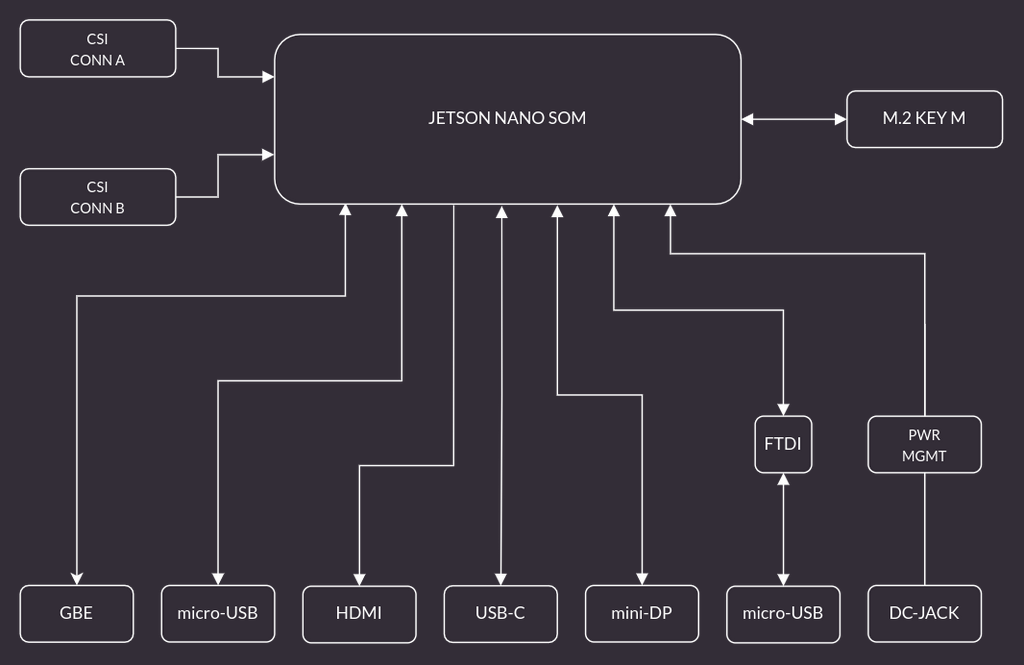
Dieses Projekt enthält offene Hardware -Designdateien für eine Basebox, die die NVIDIA Jetson Nano, Xavier NX und TX2 NX Soms unterstützt. Es wurde von Antmicro, einer benutzerdefinierten Hardware-, Software- und KI -Engineering -Firma und dem Jetson -Ökosystem -Partner von NVIDIA, erstellt. Die Platine kann mit MIPI CSI-2-Videogeräten über einen einheitlichen FFC-Stecker (Flexible Flat Cable) mit bis zu 4 Sensoren in einer 2-Spur-Konfiguration oder 3 Sensoren in einer 4-Spur-Konfiguration verbunden werden. Weitere Informationen zu den unterstützten CSI -Lane -Zuordnungen finden Sie im Produktdesign -Leitfaden. Sie finden die SOM-bezogenen Ressourcen im Jetson Download Center von Nvidia.
Die Fußleiste, ihre benutzerdefinierten Varianten, die nach Angaben von Antmicro pro Kunde entworfen wurden, und essentielles Zubehör kann aus fähigen Roboterkomponenten gekauft werden.
Die Entwurfsdateien für dieses Projekt ab Rev. 1.5 werden in Kicad bereitgestellt und gewartet. Ältere Überarbeitungen des Boards wurden im Altium -Designer vorbereitet und werden in einer separaten Niederlassung aufbewahrt.
Das Hauptverzeichnis enthält die KICAD -Designdateien, Lizenz und Readme. Die verbleibenden Dateien werden in den folgenden Verzeichnissen gespeichert:
img - enthält Grafiken für diese Readmedoc - enthält generierte Schaltpläne und andere Dokumentationenlinux-patches - Enthält Patches, die Kameraunterstützung für Kameramodule aus Allied Vision hinzufügen (siehe BSP -Abschnitt unten) Das Board kann mit den bereitgestellten Designdateien hergestellt und zusammengestellt werden. Bitte werfen Sie einen Blick auf die mechanischen Schichten, um weitere Informationen zum PCB -Stackup zu erhalten, das für die Herstellung empfohlen wird. Das Board kann durch eine Spannung im 6-36VDC-Bereich angetrieben werden. Es wird empfohlen, ein 12V 2A -DC -Versorgung zu verwenden, um das Board zu versorgen. Die Karte verfügt über einen integrierten Stromsequenzer, der das Modul direkt nach der Anwendung der Stromversorgung automatisch startet.
Die E / A -Schnittstellen der Baseboard werden im Standard -Linux für Tegra (L4T) -BSPs von Nvidia für Jetson Nano / Xavier NX / TX2 NX unterstützt. Die BSP sollte mit der Open -Source -Jetson -Fußleiste aus der Schachtel arbeiten. Um die Fußleiste mit verschiedenen Kameras und anderen Zubehör zu verwenden, müssen Sie möglicherweise Änderungen vornehmen. Wenn Sie die Platine mit Alvium-Bildsensoren der Allied Vision verwenden möchten, gibt es ein linux-patches -Verzeichnis, das Patch-Dateien enthält, die die alliierten Vision-Kameras für diese Baseboard mit dem Jetson Nano NX-Modul unterstützen. Die Patches werden mit der L4T -Version benannt und können auf die entsprechenden Zweige des von Allied Vision freigegebenen Linux -Repository angewendet werden. Die Dienste von Antmicro umfassen BSP -Entwicklung, damit Sie uns einstellen können, um die erforderlichen Änderungen für Sie vorzunehmen.
Sie können den USB OTG -Schnittstellenanschluss verwenden, um ein BSP -Bild in ein in das Baseboard eingefügte SOM hochzuladen.
Die meisten Debug -Nachrichten werden über die serielle Konsole bereitgestellt. Die Karte enthält einen FTDI -Chip, der die UART -Schnittstelle zum Host -PC bereitstellt. Weitere Informationen finden Sie in den schematischen Blättern. Der Standard -Debugg -UART -Kanal ist über /dev/ttyUSB0 zugänglich (vorausgesetzt, es gibt keine anderen FTDI -Einheiten, die mit Ihrem PC verbunden sind). Der Standard-Baudrate für serielle Debug-Verbindung beträgt 115200 Baud mit einer 8-Bit-Übertragung, 1 Stoppbit und ohne Flusskontrolle.
Die neueste Überarbeitung der Karte (1.5.x) enthält die in KICAD konvertierten Designdateien. Die BOM wurde verändert, damit der Vorstand trotz der globalen Chip -Mangel -Situation produziert werden kann. Revision 1.5.x ändert den I2C -Multiplexer (PCA9548 -> PCA9547), der zum Umgang mit Kameras und Videozubehör verwendet wird. Möglicherweise müssen Sie die Devicetree -Einträge für Videozubehör einstellen, damit sie mit dem neuen I2C -Multiplexer -Chip funktioniert.
Dieses Projekt ist unter der Lizenz Apache-2.0 lizenziert.


