Navigating Ryze Tello Drones With MATLAB App
v1.1.1
Para controlar de forma interactiva un Ryze® Tello Drone conectado a su computadora que ejecuta MATLAB®, MathWorks® proporciona una aplicación MATLAB: Ryze Tello Navigator. Esta aplicación te ayuda a:
Visualiza todos los drones Ryze Tello conectados a la red WiFi del ordenador.
Realizar el despegue/aterrizaje de un drone.
Controle la navegación del dron usando el teclado o usando los botones de control de navegación en la aplicación.
Obtenga una vista previa de la transmisión de la cámara y capture imágenes.
Grabe la transmisión de video del dron en la variable del espacio de trabajo de MATLAB.
Genere un script MATLAB para la navegación completa.
Instale MATLAB y el paquete de soporte MATLAB para drones Ryze Tello
Realice la instalación y configuración inicial y conéctese a uno o más Ryze Tello Drones.
Descarga o clona este repositorio.
Navegue a la carpeta del repositorio local en MATLAB
Ejecute los siguientes comandos en la ventana de comandos de MATLAB:
agregar ruta(contraseña);
ruta de guardado;
Inicie la aplicación ejecutando el comando ryzeTelloNavigator .
Requiere la versión R2022a o posterior de MATLAB
Paquete de soporte MATLAB® para drones Ryze Tello®
Asegúrese de que el dron que aparece en la Lista de dispositivos sea el que desea controlar mediante la aplicación. Si el dron no aparece en la lista, realice la instalación y configuración nuevamente.
| Paso | Acción | Resultado |
|---|---|---|
| 1 |  Haga clic en el nombre del dron en la Lista de dispositivos y haga clic en Verificación previa al vuelo en la sección Navegación en la parte superior. Haga clic en el nombre del dron en la Lista de dispositivos y haga clic en Verificación previa al vuelo en la sección Navegación en la parte superior. | Aparece un nuevo cuadro de diálogo, Ejecución de la lista de verificación previa al vuelo. Todos los demás controles de la aplicación están desactivados mientras se realiza la verificación previa al vuelo. Si hay errores, el cuadro de diálogo proporciona enlaces a los pasos necesarios para la solución de problemas. |
| 2 | Después de verificar que todas las comprobaciones previas al vuelo se hayan completado correctamente, haga clic en Aceptar. |  La indicación de verificación previa al vuelo completada aparece en el lado derecho de la aplicación. Todos los demás controles también están habilitados. La indicación de verificación previa al vuelo completada aparece en el lado derecho de la aplicación. Todos los demás controles también están habilitados. |
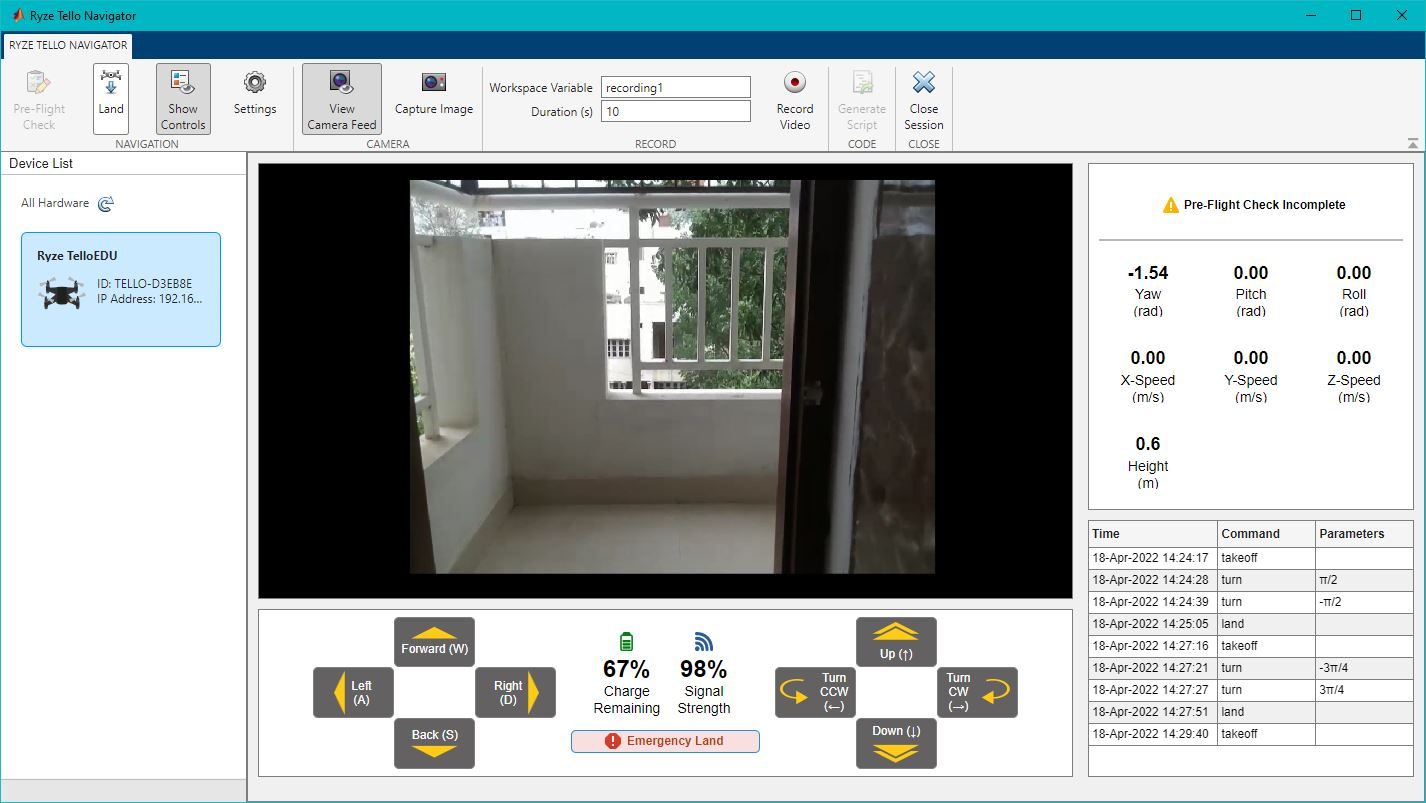
Ryze Tello Navigator te ayuda a realizar despegues/aterrizajes y a controlar de forma interactiva el dron Ryze Tello.
Nota : Antes de iniciar el despegue del dron, considere las precauciones generales de seguridad. Si detecta algún daño que pueda ocurrirle al dron y sus alrededores durante el despegue o mientras realiza el control de navegación manual (como se menciona en los pasos siguientes), puede hacer clic en Aterrizaje de emergencia . Al hacer clic en este botón se activa un apagado de emergencia de los motores del dron, lo que hace que caiga al suelo desde la altura actual (para drones Tello EDU) o obliga al dron a aterrizar verticalmente desde su posición actual (para drones Tello).
| Paso | Acción | Resultado |
|---|---|---|
| 1 |  Comprueba que la carga de la batería y la intensidad de la señal del dron, tal como se muestra en la aplicación, son suficientes para realizar el despegue y el control. Comprueba que la carga de la batería y la intensidad de la señal del dron, tal como se muestra en la aplicación, son suficientes para realizar el despegue y el control. | |
| 2 |  Haga clic en Ver transmisión de la cámara para verificar que la transmisión de la cámara del dron esté funcionando correctamente. Haga clic en Ver transmisión de la cámara para verificar que la transmisión de la cámara del dron esté funcionando correctamente. | La aplicación muestra la vista previa, tal como la ve la cámara del dron antes del despegue. Más tarde, cuando el dron se mueva, la vista previa se actualizará con la transmisión en vivo de la cámara. |
| 3 |  Presione la barra espaciadora en su teclado o haga clic en Despegar que aparece en la sección Navegación en el área de la barra de herramientas. Presione la barra espaciadora en su teclado o haga clic en Despegar que aparece en la sección Navegación en el área de la barra de herramientas. | Los motores del dron se encienden y el dron despega a una altitud particular y flota en esa posición. El botón Despegar se reemplaza por el botón Aterrizar . |
| 4 | Realice la navegación manual del dron desde la aplicación haciendo clic en los íconos respectivos en la aplicación o usando su teclado. | El dron se mueve según el control de navegación que hayas activado. La transmisión de la cámara (vista previa), si está habilitada, también se actualiza. Para aumentar el área de la ventana de vista previa como se ve en la aplicación, puede ocultar el panel que muestra botones para el control manual. Haga clic en Mostrar controles para desactivar el panel. Aún puedes usar las teclas del teclado para controlar el dron. |
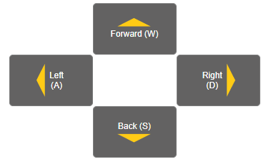
Teclas WASD:
W – Avanzar
A – Mover hacia la izquierda
S – Retroceder
D – Mover a la derecha
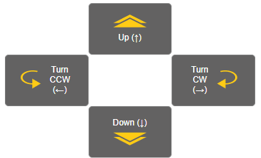
Teclas de flecha:
▲ – Mueve el dron hacia arriba
▼ – Mueve el dron hacia abajo
◄ – Gira el dron en sentido antihorario
► – Gira el dron en el sentido de las agujas del reloj
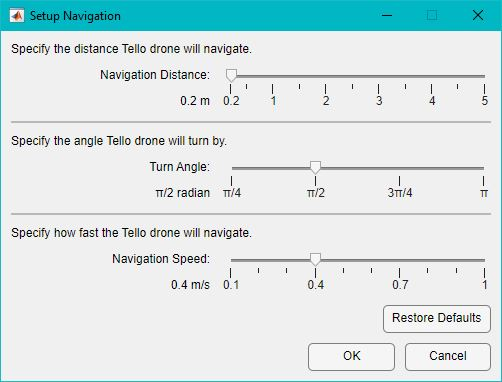
Puede cambiar la configuración de navegación que utiliza el dron cada vez que activa un movimiento en una dirección particular. Haga clic en Configuración para abrir el cuadro de diálogo Configurar navegación y especifique los valores de distancia, ángulo y velocidad utilizando los controles deslizantes. Si desea restaurar los valores predeterminados (Distancia de navegación: 0,2 m, Ángulo de giro: π/2, Velocidad de navegación: 0,4 m/s), haga clic en Restaurar valores predeterminados en el cuadro de diálogo.

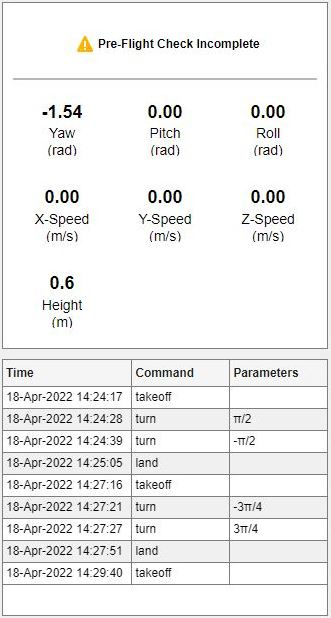
La aplicación también muestra los datos de navegación en vivo (captados por los sensores del dron) y también el registro de los comandos que activó usando los botones de navegación o las teclas del teclado. Esta información aparece en el panel lateral derecho.
Ryze Tello Navigator te ayuda a capturar imágenes y grabar videos vistos a través de la cámara FPV del dron Ryze Tello.
| Paso | Acción | Resultado |
|---|---|---|
| 1 |  Capture una imagen a la vez. Capture una imagen a la vez. | La imagen se almacena como una variable de espacio de trabajo. |
| 2 |  Defina la variable del espacio de trabajo y la duración para grabar el video y luego haga clic en Grabar video. Defina la variable del espacio de trabajo y la duración para grabar el video y luego haga clic en Grabar video. | El vídeo de la cámara del dron comienza a grabarse durante el tiempo especificado. Haga clic en Detener para detener la grabación en cualquier momento durante la grabación y el video se guarda automáticamente en el espacio de trabajo como una matriz de imágenes. |
Ryze Tello Navigator le ayuda a generar un script Live Editor de la navegación que realizó. Puede utilizar este script para definir la configuración inicial y la ruta de vuelo del dron y luego agregar algoritmos personalizados para realizar flujos de trabajo adicionales.

Para hacer esto, haga clic en Generar secuencia de comandos después de aterrizar exitosamente el dron.
| Advertencias | Problema y acción recomendada |
|---|---|
| Nivel de batería bajo | La aplicación comienza a mostrar advertencias si la indicación de carga restante muestra un valor inferior al 20% y el dron está volando o flotando. Si el nivel de la batería cae por debajo del 10%, el dron aterriza automáticamente desde su posición actual. Para evitar esto, asegúrese de aterrizar el dron usando el botón Aterrizar en la aplicación y luego reemplace la batería del dron. |
| Baja intensidad de la señal | La aplicación muestra constantemente los valores de intensidad de la señal mientras el dron está volando. Se recomienda tomar las medidas necesarias si la intensidad de la señal es inferior al 20% para evitar perder el control del dron. Si se pierde la conexión con el dron, aparece un cuadro de diálogo que muestra la opción para volver a conectarse con el dron. Si aún falla, se muestra un mensaje de error. |
La licencia está disponible en el archivo LICENSE.TXT en este repositorio de GitHub.
Central de MATLAB
Copyright 2022 The MathWorks, Inc.


