open3d_slam
1.0.0
open3d_slam es una biblioteca C++ (cpp) para SLAM con integración ROS.
Contacto principal: Edo Jelavic ([email protected])
Autores: Edo Jelavic, Julian Nubert, Marco Hutter
Póster y resumen: enlace
Documentación: enlace
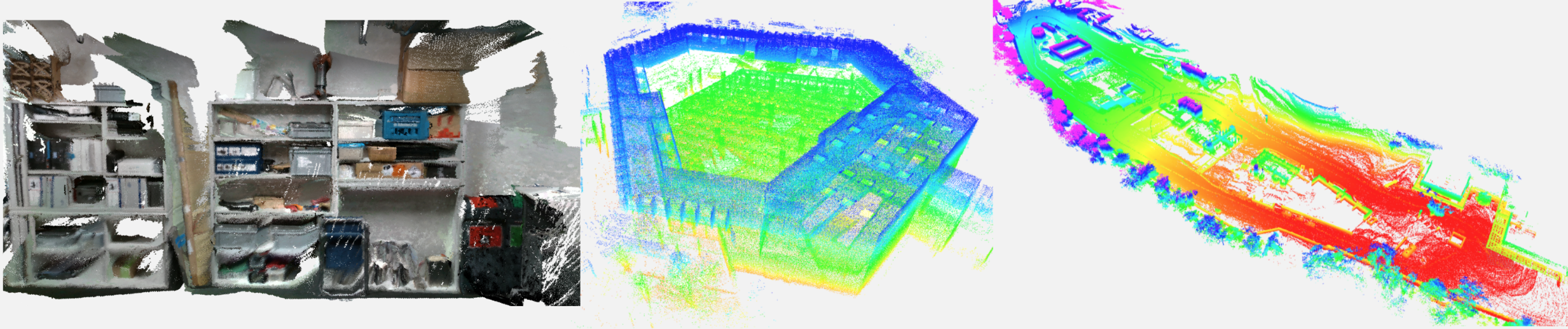
La principal diferencia entre open3d_slam y otras bibliotecas SLAM es que open3d_slam fue diseñado para ser simple y usarse con fines educativos. De hecho, open3d_slam utiliza sólo algoritmos bien establecidos en su forma básica. Esperamos que esto facilite la entrada a este campo a los recién llegados. Funciona con nubes de puntos, no se requiere entrada adicional como IMU. Open3D_slam puede crear un mapa desde cero o localizarlo en un mapa determinado. El mapa proporcionado también se puede ampliar con nuevas medidas.
Basamos nuestra implementación en Open3D, una biblioteca bien mantenida y de alto rendimiento para el procesamiento de datos 3D.
La documentación y los conjuntos de datos de ejemplo se pueden encontrar aquí open3d_slam Documentation.
Proporcionamos un contenedor catkin para Open3D de modo que pueda utilizar Open3D fácilmente en sus proyectos ROS. Consulte la documentación en open3d_catkin/README.md.
Si encuentra útil este trabajo o lo utiliza para su investigación, considere citar el trabajo correspondiente:
@inproceedings{jelavic2022open3d,
title={Open3D SLAM: Point Cloud Based Mapping and Localization for Education},
author={Jelavic, Edo and Nubert, Julian and Hutter, Marco},
booktitle={Robotic Perception and Mapping: Emerging Techniques, ICRA 2022 Workshop},
pages={24},
year={2022},
organization={ETH Zurich, Robotic Systems Lab}
}


