Car Simulator
1.0.0
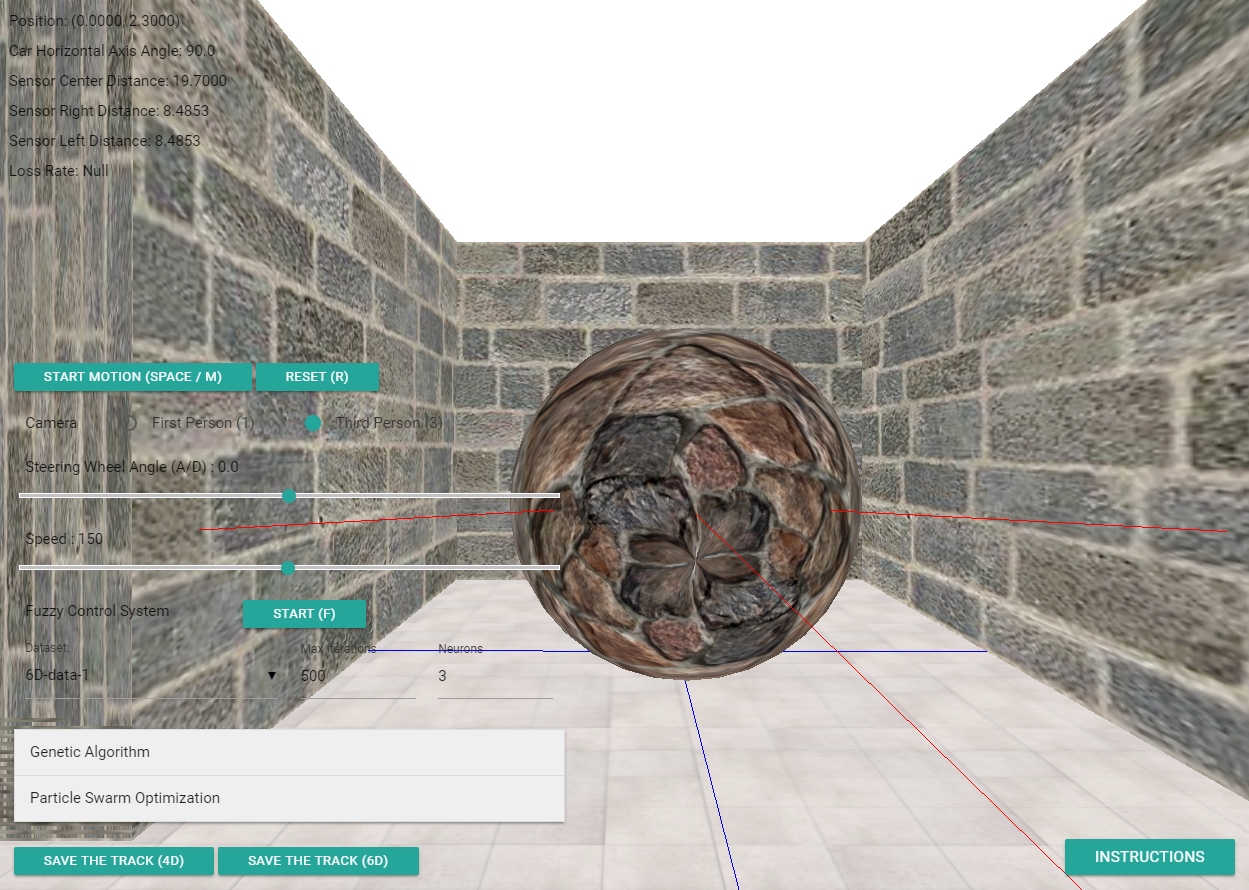
Car Simulator utiliza el sistema de control difuso, el algoritmo genético y la optimización del enjambre de partículas para simular el movimiento del coche autónomo en el mapa. También es compatible con dispositivos VR; consulte aquí para obtener más detalles.
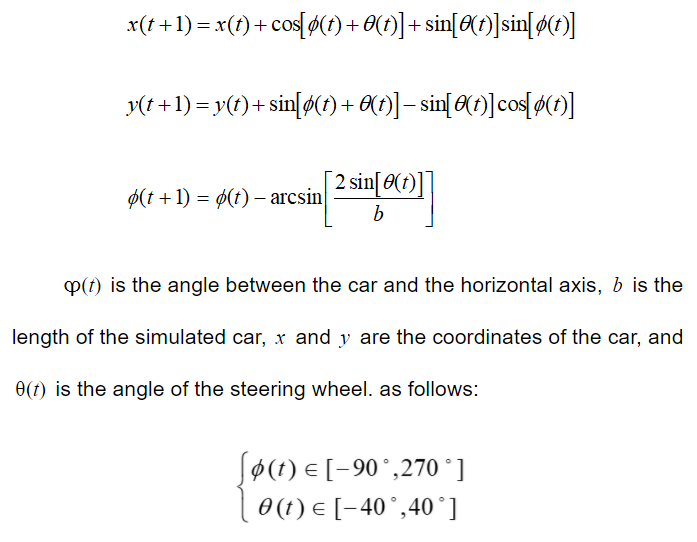
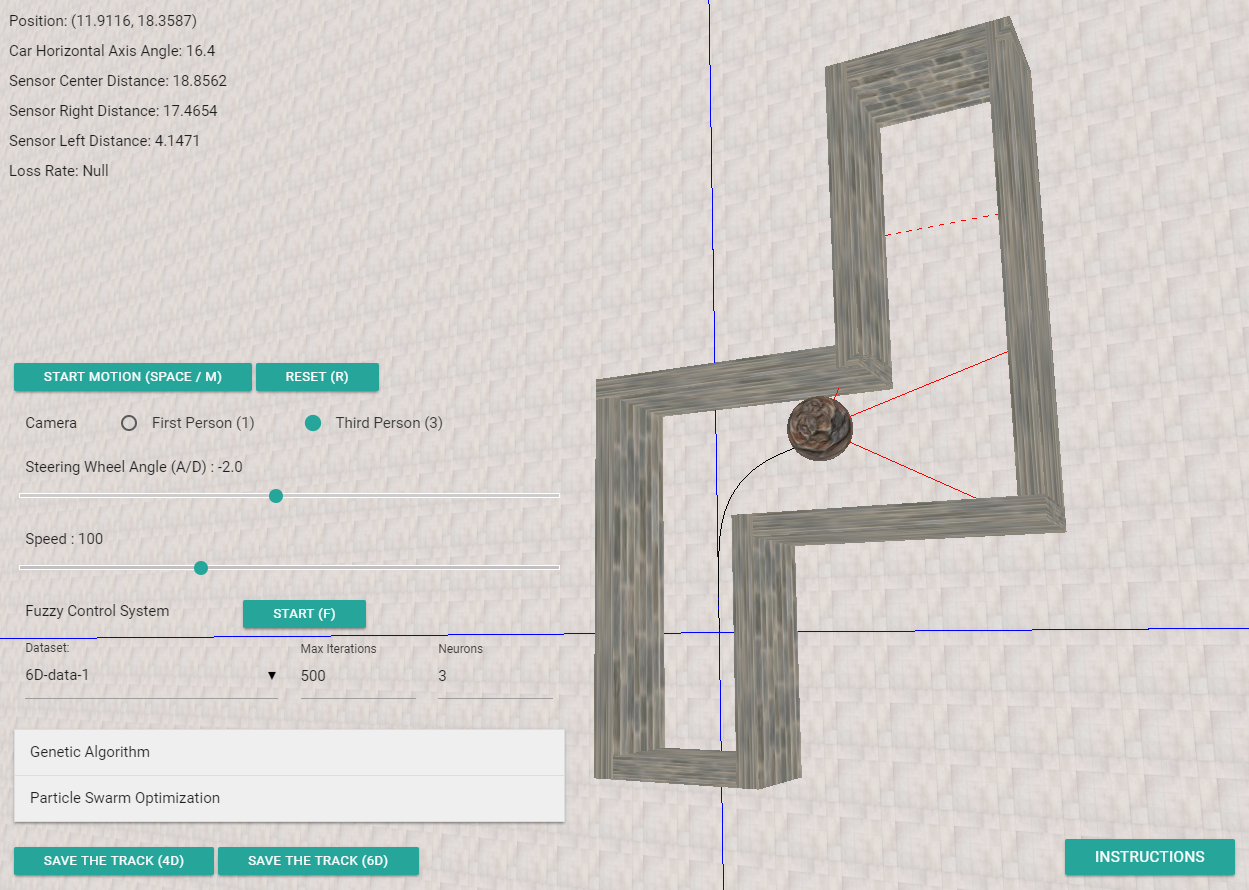
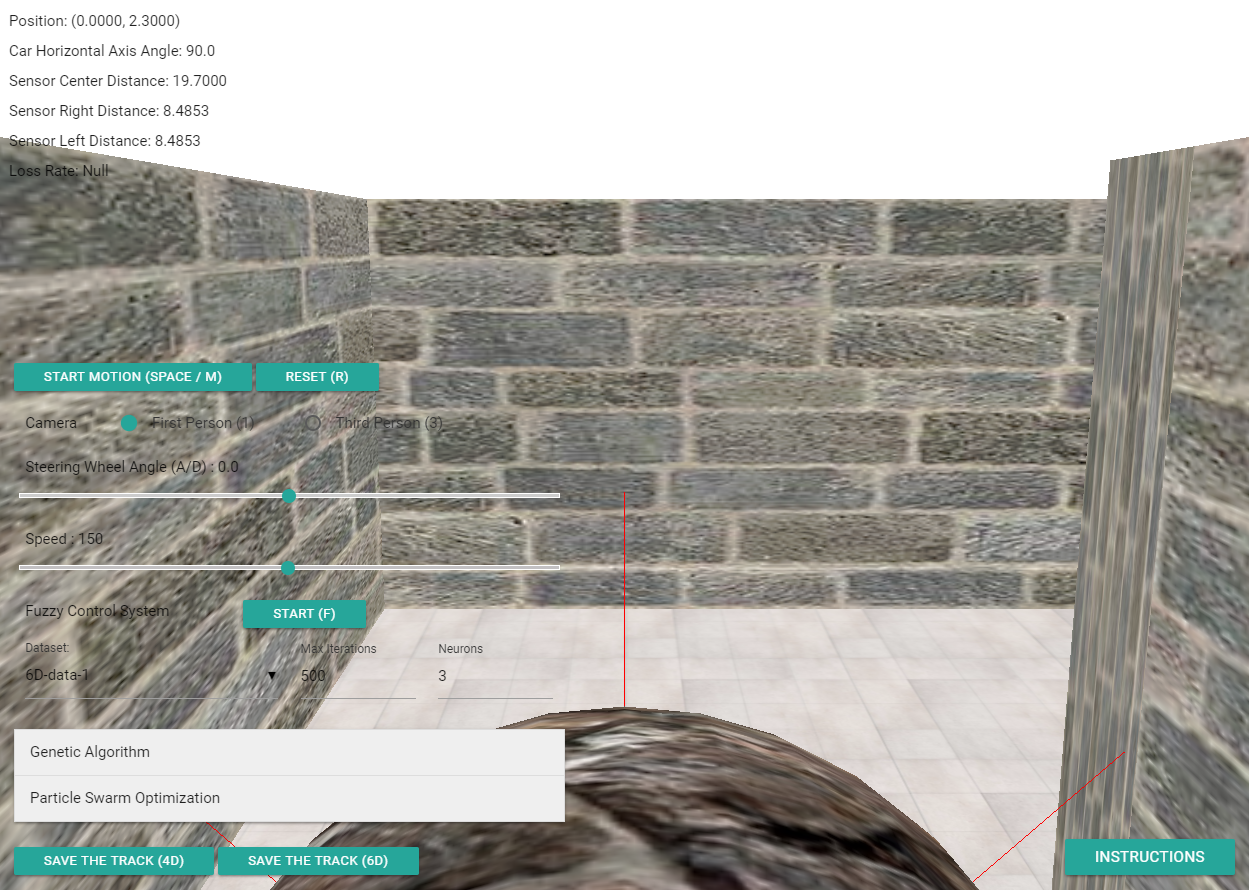
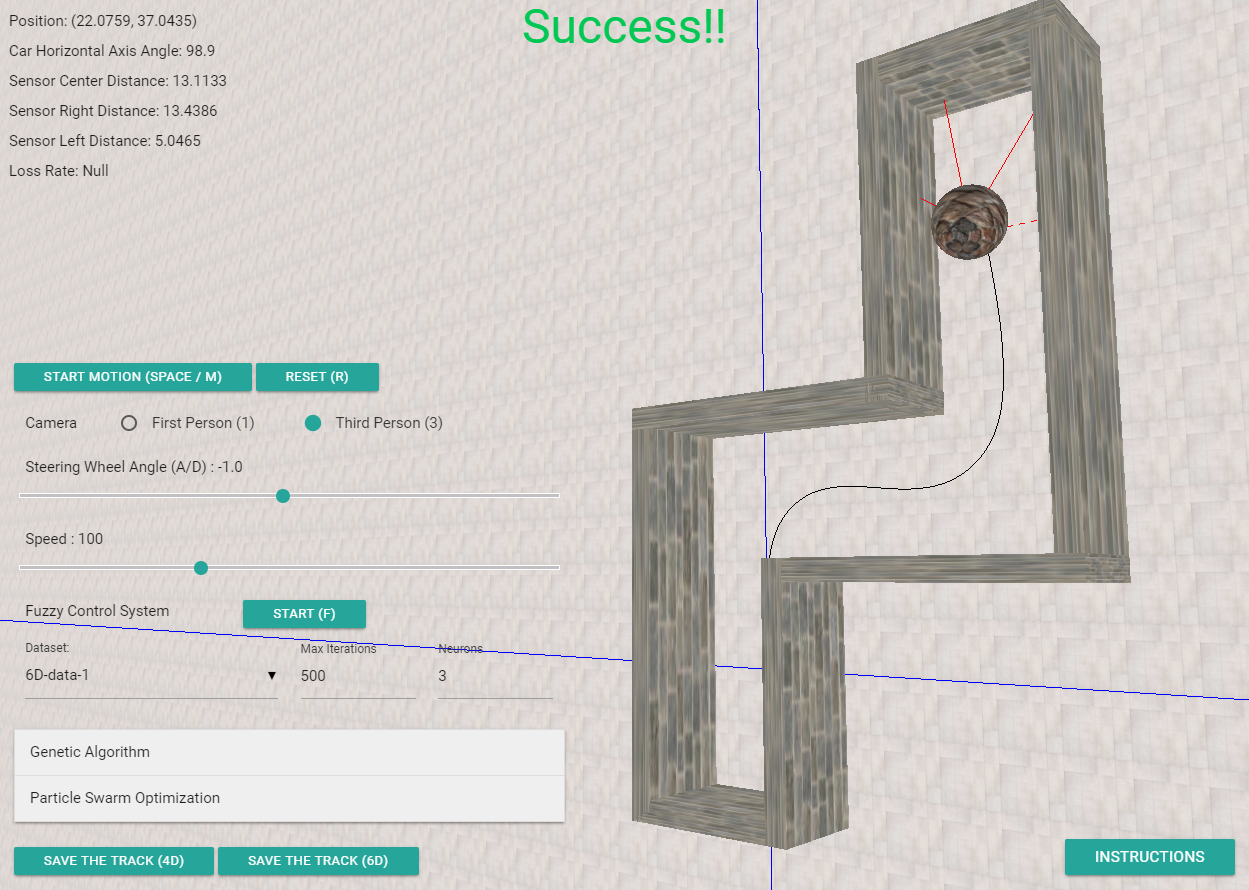
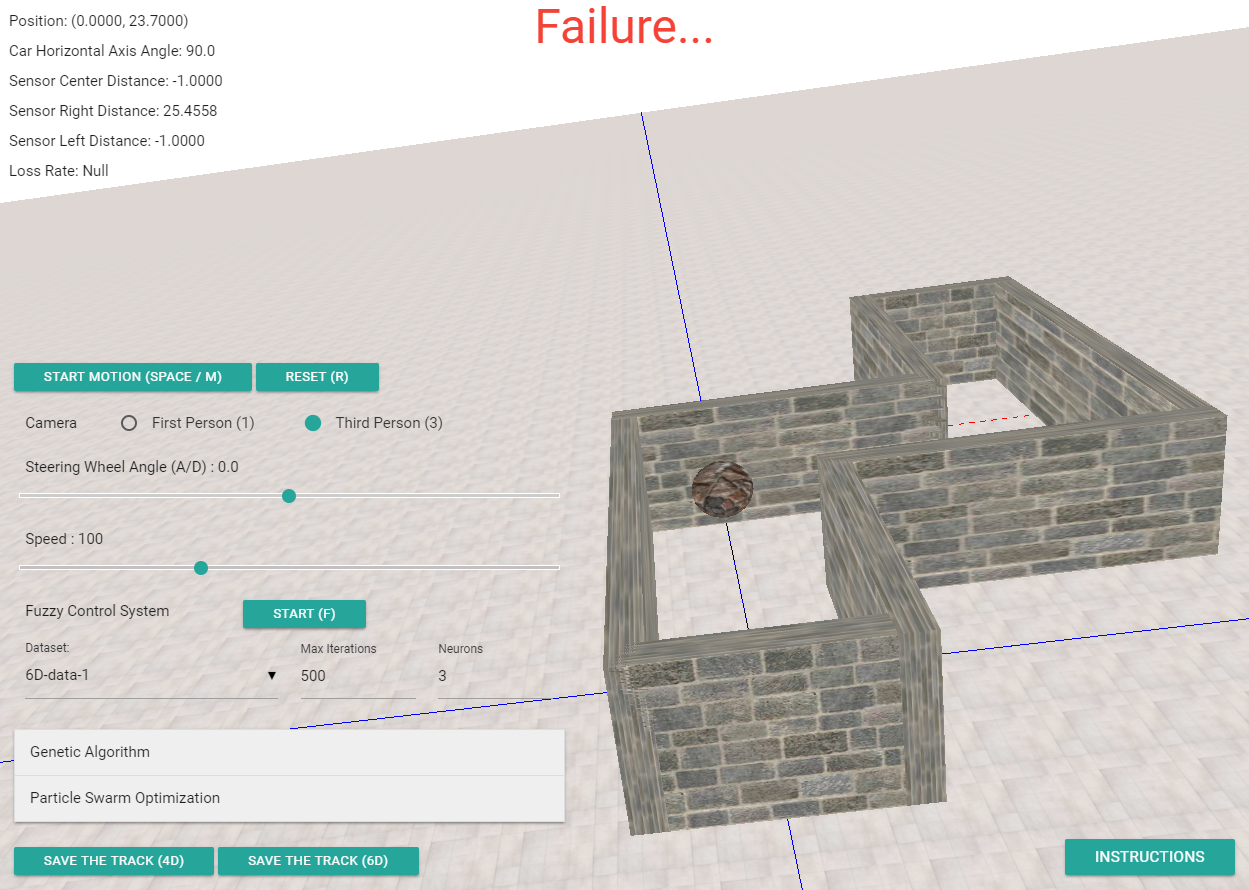
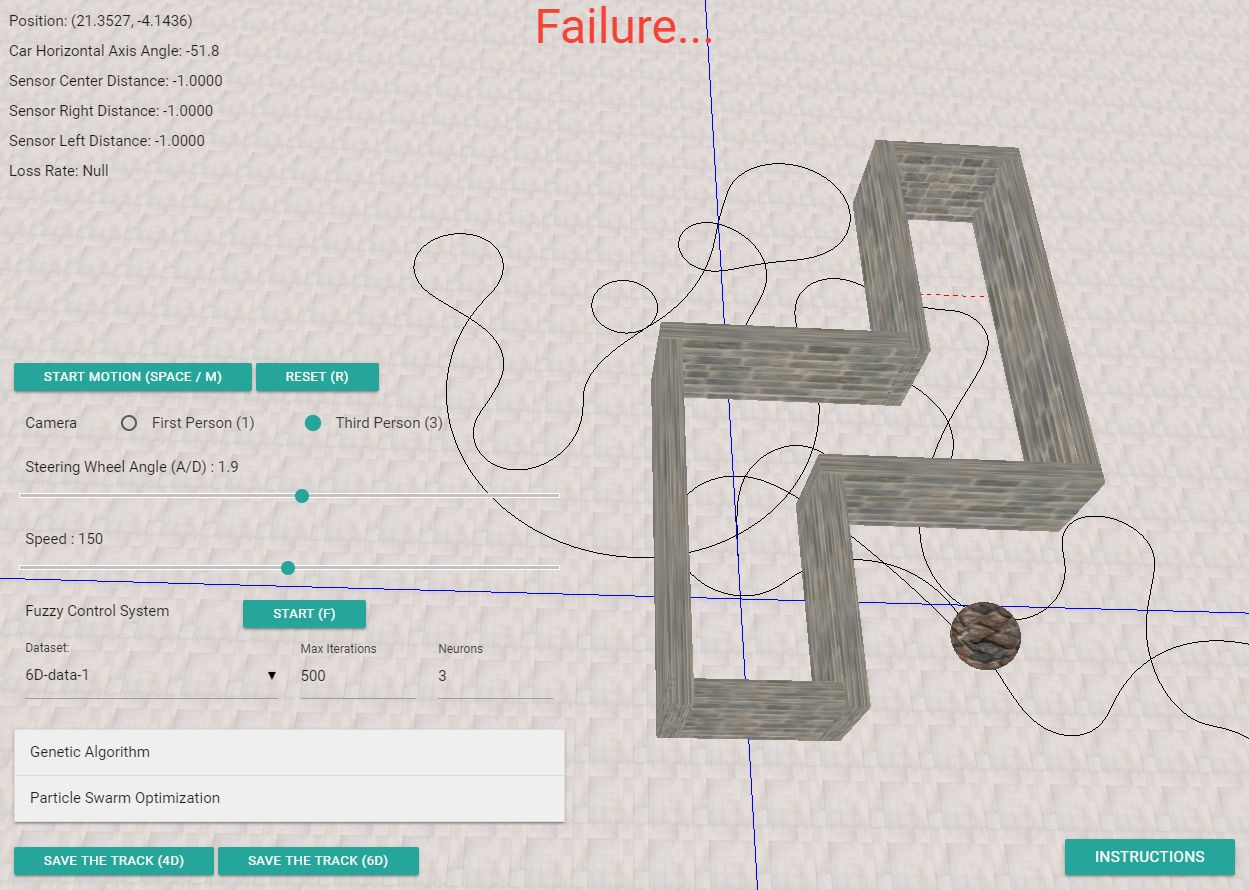
La entrada contiene los tres sensores de distancia del automóvil (frontal, 45 grados a la izquierda y a la derecha), que se pueden obtener a partir de la ecuación de movimiento definida, la posición del automóvil y el ángulo entre el automóvil y el eje horizontal. La salida es el ángulo de rotación del volante.
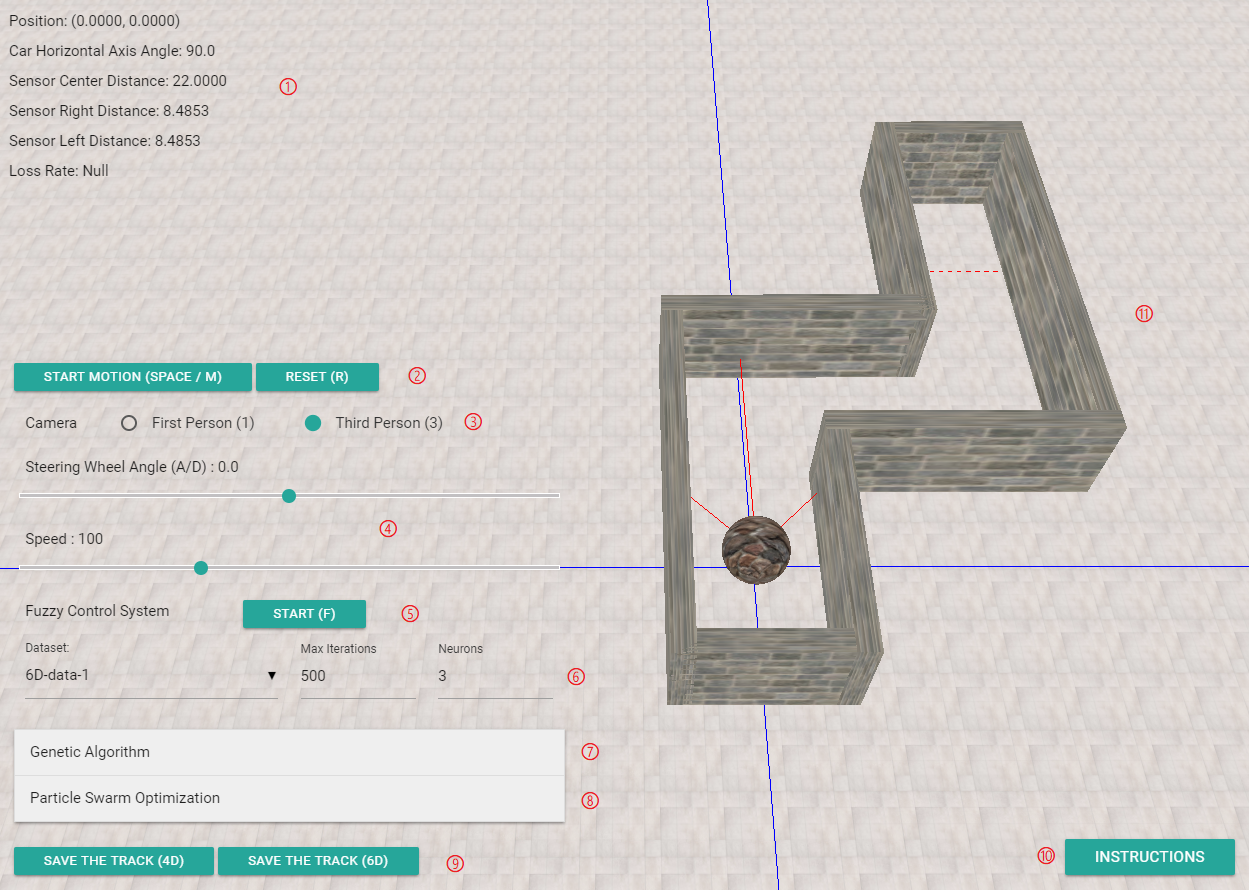
El objetivo es llegar a la línea final sin encontrar la pared y generar la trayectoria del movimiento (incluida la posición de cada punto en el tiempo, el valor del sensor y el ángulo de rotación del volante) como un archivo de texto, luego mostrarlo en la interfaz gráfica.
La ecuación de movimiento del automóvil simulado es la siguiente:
El sistema de control difuso utiliza siete reglas difusas personalizadas y un defuzzificador de centro de gravedad discreto. Consulte aquí para obtener más detalles.
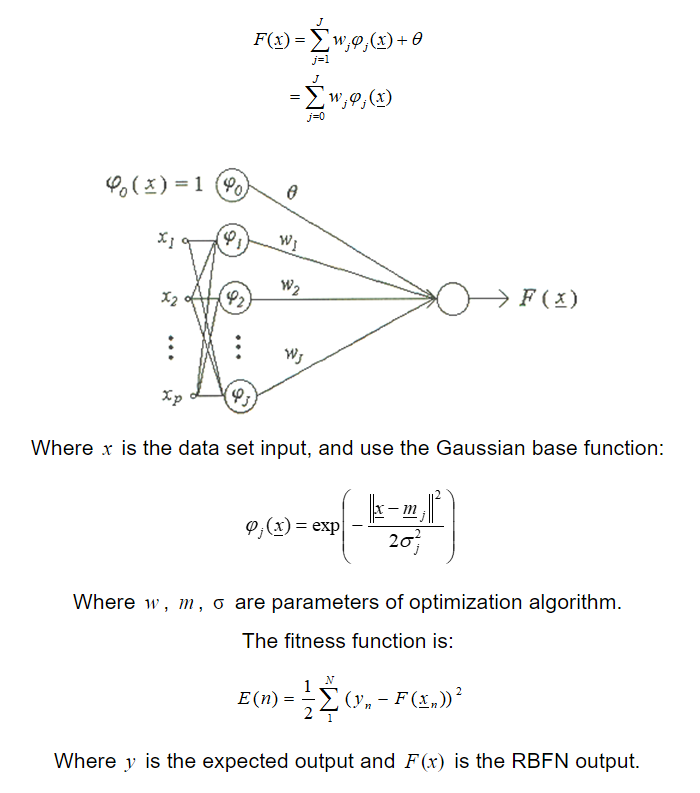
Car Simulator utiliza el algoritmo genético de valor real (GA) para entrenar la red de función de base radial (RBFN) y el automóvil será controlado por RBFN. El gen se define como los tres parámetros de RBFN (w, m, σ) del vector de dimensión mixta. La función de aptitud es la varianza media de la salida esperada del conjunto de datos y la salida RBFN en el caso de entrada específico. El valor de aptitud más bajo es el mejor parámetro RBFN.
La estructura de la red de funciones de base radial es la siguiente:
Car Simulator también puede utilizar la optimización del enjambre de partículas (PSO) para entrenar RBFN. La coordenada PSO se define como los tres parámetros de RBFN (w, m, σ) del vector de dimensión mixta. La función de aptitud es la varianza media de la salida esperada del conjunto de datos y la salida RBFN en el caso de entrada específico. El valor de aptitud más bajo es el mejor parámetro RBFN.
https://jasonnor.github.io/Car-Simulator/
Car Simulator también es compatible con el dispositivo VR, abra esta página.
InputA1 InputB1 InputC1 Output1
InputA2 InputB2 InputC2 Output2
...
Donde EntradaA es el valor del sensor de distancia central, EntradaB es el valor del sensor de distancia derecho, EntradaC es el valor del sensor de distancia izquierdo y la salida es el ángulo de rotación del volante. Los conjuntos de datos predeterminados se pueden encontrar aquí.
InputA1 InputB1 InputC1 InputD1 InputE1 Output1
InputA2 InputB2 InputC2 InputD1 InputE1 Output2
...
Donde EntradaA es la coordenada X del automóvil, EntradaB es la coordenada Y del automóvil, EntradaC es el valor del sensor de distancia central, EntradaD es el valor del sensor de distancia derecho, EntradaE es el valor del sensor de distancia izquierdo y la salida es el ángulo de rotación del volante. Los conjuntos de datos predeterminados se pueden encontrar aquí.
No dude en utilizarlo si está interesado en solucionar problemas y contribuir directamente al código base.
Car Simulator se lanza bajo la licencia MIT. Consulte el archivo de LICENCIA para obtener más detalles.


