video diffusion pytorch
0.7.0

estos fuegos artificiales no existen
Texto a vídeo, ¡está sucediendo! Página oficial del proyecto
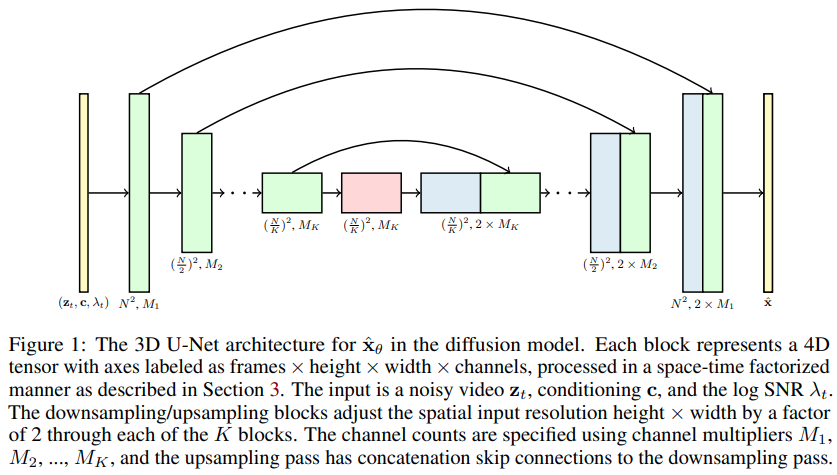
Implementación de modelos de difusión de video, el nuevo artículo de Jonathan Ho que extiende los DDPM a la generación de video, en Pytorch. Utiliza una red U especial factorizada en el espacio-tiempo, ampliando la generación de imágenes en 2D a vídeos en 3D.
14k para mnist en movimiento difícil (converge mucho más rápido y mejor que NUWA) - wip
Los experimentos anteriores solo son posibles gracias a los recursos proporcionados por Stability.ai
Cualquier novedad en síntesis de texto a vídeo se centralizará en Imagen-pytorch
$ pip install video-diffusion-pytorch import torch
from video_diffusion_pytorch import Unet3D , GaussianDiffusion
model = Unet3D (
dim = 64 ,
dim_mults = ( 1 , 2 , 4 , 8 )
)
diffusion = GaussianDiffusion (
model ,
image_size = 32 ,
num_frames = 5 ,
timesteps = 1000 , # number of steps
loss_type = 'l1' # L1 or L2
)
videos = torch . randn ( 1 , 3 , 5 , 32 , 32 ) # video (batch, channels, frames, height, width) - normalized from -1 to +1
loss = diffusion ( videos )
loss . backward ()
# after a lot of training
sampled_videos = diffusion . sample ( batch_size = 4 )
sampled_videos . shape # (4, 3, 5, 32, 32)Para condicionar el texto, derivaron incrustaciones de texto pasando primero el texto tokenizado a través de BERT-large. Entonces solo tienes que entrenarlo así.
import torch
from video_diffusion_pytorch import Unet3D , GaussianDiffusion
model = Unet3D (
dim = 64 ,
cond_dim = 64 ,
dim_mults = ( 1 , 2 , 4 , 8 )
)
diffusion = GaussianDiffusion (
model ,
image_size = 32 ,
num_frames = 5 ,
timesteps = 1000 , # number of steps
loss_type = 'l1' # L1 or L2
)
videos = torch . randn ( 2 , 3 , 5 , 32 , 32 ) # video (batch, channels, frames, height, width)
text = torch . randn ( 2 , 64 ) # assume output of BERT-large has dimension of 64
loss = diffusion ( videos , cond = text )
loss . backward ()
# after a lot of training
sampled_videos = diffusion . sample ( cond = text )
sampled_videos . shape # (2, 3, 5, 32, 32)También puedes pasar directamente las descripciones del vídeo como cadenas, si planeas usar BERT-base para el acondicionamiento de texto.
import torch
from video_diffusion_pytorch import Unet3D , GaussianDiffusion
model = Unet3D (
dim = 64 ,
use_bert_text_cond = True , # this must be set to True to auto-use the bert model dimensions
dim_mults = ( 1 , 2 , 4 , 8 ),
)
diffusion = GaussianDiffusion (
model ,
image_size = 32 , # height and width of frames
num_frames = 5 , # number of video frames
timesteps = 1000 , # number of steps
loss_type = 'l1' # L1 or L2
)
videos = torch . randn ( 3 , 3 , 5 , 32 , 32 ) # video (batch, channels, frames, height, width)
text = [
'a whale breaching from afar' ,
'young girl blowing out candles on her birthday cake' ,
'fireworks with blue and green sparkles'
]
loss = diffusion ( videos , cond = text )
loss . backward ()
# after a lot of training
sampled_videos = diffusion . sample ( cond = text , cond_scale = 2 )
sampled_videos . shape # (3, 3, 5, 32, 32) Este repositorio también contiene una práctica clase Trainer para entrenar en una carpeta de gifs . Cada gif debe tener las dimensiones correctas image_size y num_frames .
import torch
from video_diffusion_pytorch import Unet3D , GaussianDiffusion , Trainer
model = Unet3D (
dim = 64 ,
dim_mults = ( 1 , 2 , 4 , 8 ),
)
diffusion = GaussianDiffusion (
model ,
image_size = 64 ,
num_frames = 10 ,
timesteps = 1000 , # number of steps
loss_type = 'l1' # L1 or L2
). cuda ()
trainer = Trainer (
diffusion ,
'./data' , # this folder path needs to contain all your training data, as .gif files, of correct image size and number of frames
train_batch_size = 32 ,
train_lr = 1e-4 ,
save_and_sample_every = 1000 ,
train_num_steps = 700000 , # total training steps
gradient_accumulate_every = 2 , # gradient accumulation steps
ema_decay = 0.995 , # exponential moving average decay
amp = True # turn on mixed precision
)
trainer . train () Los videos de muestra (como archivos gif ) se guardarán periódicamente en ./results , al igual que los parámetros del modelo de difusión.
Una de las afirmaciones del artículo es que al realizar atención espacio-temporal factorizada, se puede obligar a la red a prestar atención al presente para entrenar imágenes y videos en conjunto, lo que lleva a mejores resultados.
No estaba claro cómo lograron esto, pero formulé una suposición.
Para llamar la atención sobre el momento presente para un cierto porcentaje de muestras de videos por lotes, simplemente pase prob_focus_present = <prob> en el método de difusión hacia adelante.
loss = diffusion ( videos , cond = text , prob_focus_present = 0.5 ) # for 50% of videos, focus on the present during training
loss . backward ()Si tiene una mejor idea de cómo se hace esto, simplemente abra una edición de github.
@misc { ho2022video ,
title = { Video Diffusion Models } ,
author = { Jonathan Ho and Tim Salimans and Alexey Gritsenko and William Chan and Mohammad Norouzi and David J. Fleet } ,
year = { 2022 } ,
eprint = { 2204.03458 } ,
archivePrefix = { arXiv } ,
primaryClass = { cs.CV }
} @misc { Saharia2022 ,
title = { Imagen: unprecedented photorealism × deep level of language understanding } ,
author = { Chitwan Saharia*, William Chan*, Saurabh Saxena†, Lala Li†, Jay Whang†, Emily Denton, Seyed Kamyar Seyed Ghasemipour, Burcu Karagol Ayan, S. Sara Mahdavi, Rapha Gontijo Lopes, Tim Salimans, Jonathan Ho†, David Fleet†, Mohammad Norouzi* } ,
year = { 2022 }
}

