jetson nano baseboard
v1.4.6
Copyright (c) 2020-2024 Antmicro

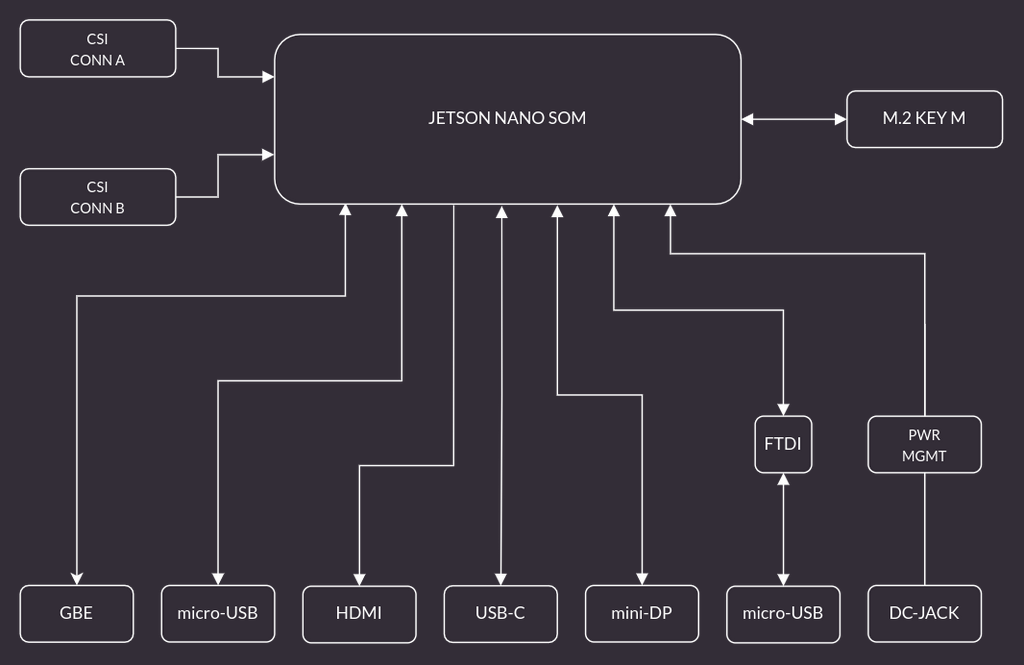
Este proyecto contiene archivos de diseño de hardware abiertos para un plato que admite Nvidia Jetson Nano, Xavier NX y TX2 NX SOM. Fue creado por Antmicro, una empresa personalizada de hardware, software y ingeniería de IA y socio del ecosistema Jetson de NVIDIA. La placa se puede intervenir con dispositivos de video MIPI CSI-2 a través de un conector unificado de cable plano flexible (FFC), admitiendo hasta 4 sensores en una configuración de 2 carriles o 3 sensores en una configuración de 4 carriles. Consulte la Guía de diseño del producto para el SOM relevante para obtener más detalles sobre las asignaciones de carril CSI compatibles. Encontrará los recursos relacionados con SOM en el centro de descarga de Nvidia's Jetson.
La base de la base, sus variantes personalizadas diseñadas por Antmicro según la especificación del cliente, y los accesorios esenciales se pueden comprar en componentes de robot capaces.
Los archivos de diseño para este proyecto a partir de Rev. 1.5 se proporcionan y mantienen en KiCAD. Las revisiones más antiguas de la junta se prepararon en el diseñador de Altium y se mantienen en una rama separada.
El directorio principal contiene los archivos de diseño Kicad, la licencia y el readme. Los archivos restantes se almacenan en los siguientes directorios:
img - Contiene gráficos para este Readmedoc : contiene esquemas generados y otra documentaciónlinux-patches : contiene parches que agregan soporte de cámara para módulos de cámara de la visión aliada (consulte la sección BSP a continuación) La placa se puede producir y ensamblar utilizando los archivos de diseño proporcionados. Eche un vistazo a las capas mecánicas para obtener más información sobre la pila PCB recomendada para la fabricación. La placa puede ser alimentada por un voltaje en el rango de 6-36VDC. Se recomienda utilizar un suministro de CC de 12V 2A para alimentar la placa. La placa tiene un secuenciador de potencia integrado que inicia el módulo automáticamente justo después de aplicar la fuente de alimentación.
Las interfaces de E / S del zócalo se admiten en el Linux estándar para Tegra (L4T) BSP proporcionados por NVIDIA para Jetson Nano / Xavier NX / TX2 NX. El BSP debe funcionar con el plato base de código abierto Jetson fuera de la caja. Sin embargo, para usar el zócalo con varias cámaras y otros accesorios, es posible que deba hacer modificaciones. Si planea usar la placa con sensores de imagen Alvium Allied Vision, hay un directorio linux-patches , que contiene archivos de parche que agregan soporte para las cámaras de visión Allied para este plato frecuente con el módulo Jetson Nano NX. Los parches se nombran con la versión L4T y se pueden aplicar a las ramas correspondientes del repositorio de Linux lanzado por Allied Vision. Los servicios de Antmicro involucran el desarrollo de BSP para que pueda contratarnos para hacer las modificaciones necesarias para usted.
Puede usar el conector de la interfaz USB OTG para cargar una imagen BSP en un SOM insertado en la base.
La mayoría de los mensajes de depuración se proporcionan a través de la consola serie. La placa incluye un chip FTDI que proporciona la interfaz UART a la PC host. Consulte las hojas esquemáticas para obtener más detalles. Se puede acceder al canal de depuración predeterminado a través de /dev/ttyUSB0 (suponiendo que no hay otras unidades FTDI conectadas a su PC). El baudio predeterminado para la conexión de depuración en serie es 115200 baudios con una transmisión de 8 bits, 1 bit de parada y sin control de flujo.
La última revisión de la Junta (1.5.x) incluye los archivos de diseño convertidos en Kicad. El nacimiento ha sido alterado para que la junta se pueda producir a pesar de la situación de escasez de chips globales. Revisión 1.5.x Cambia el multiplexor I2C (PCA9548 -> PCA9547) utilizado para manejar las cámaras y los accesorios de video. Es posible que deba ajustar las entradas DeviceTree para accesorios de video para que funcionen con el nuevo chip de multiplexor I2C.
Este proyecto tiene licencia bajo la licencia Apache-2.0.


