Navigating Ryze Tello Drones With MATLAB App
v1.1.1
Pour contrôler de manière interactive un drone Ryze® Tello connecté à votre ordinateur exécutant MATLAB®, MathWorks® fournit une application MATLAB - Ryze Tello Navigator. Cette application vous aide à :
Visualisez tous les drones Ryze Tello connectés au réseau WiFi de l'ordinateur.
Effectuer le décollage/atterrissage d'un drone.
Contrôlez la navigation du drone à l'aide du clavier ou en utilisant les boutons de commande de navigation dans l'application.
Prévisualisez le flux de la caméra et capturez des images.
Enregistrez le flux vidéo du drone dans la variable de l'espace de travail MATLAB.
Générez un script MATLAB pour la navigation terminée.
Installer MATLAB et le package de support MATLAB pour les drones Ryze Tello
Effectuez l'installation et la configuration initiales et connectez-vous à un ou plusieurs drones Ryze Tello.
Téléchargez ou clonez ce référentiel.
Accédez au dossier du référentiel local dans MATLAB
Exécutez les commandes suivantes dans la fenêtre de commande MATLAB :
addpath(mdp);
chemin de sauvegarde ;
Lancez l'application en exécutant la commande ryzeTelloNavigator .
Nécessite la version MATLAB R2022a ou plus récente
Package de support MATLAB® pour les drones Ryze Tello®
Assurez-vous que le drone qui apparaît dans la liste des appareils est celui que vous souhaitez contrôler à l'aide de l'application. Si le drone n'est pas répertorié, effectuez à nouveau l'installation et la configuration.
| Étape | Action | Résultat |
|---|---|---|
| 1 |  Cliquez sur le nom du drone dans la liste des appareils et cliquez sur Vérification avant vol dans la section Navigation en haut. Cliquez sur le nom du drone dans la liste des appareils et cliquez sur Vérification avant vol dans la section Navigation en haut. | Une nouvelle boîte de dialogue, Exécution de la liste de contrôle avant vol, apparaît. Tous les autres contrôles de l'application sont désactivés pendant la vérification avant vol. S'il y a des erreurs, la boîte de dialogue fournit des liens vers les étapes de dépannage requises |
| 2 | Après avoir vérifié que toutes les vérifications préalables au vol ont été effectuées avec succès, cliquez sur OK. |  L’indication Pre-Flight Check Completed apparaît sur le côté droit de l’application. Tous les autres contrôles sont également activés. L’indication Pre-Flight Check Completed apparaît sur le côté droit de l’application. Tous les autres contrôles sont également activés. |
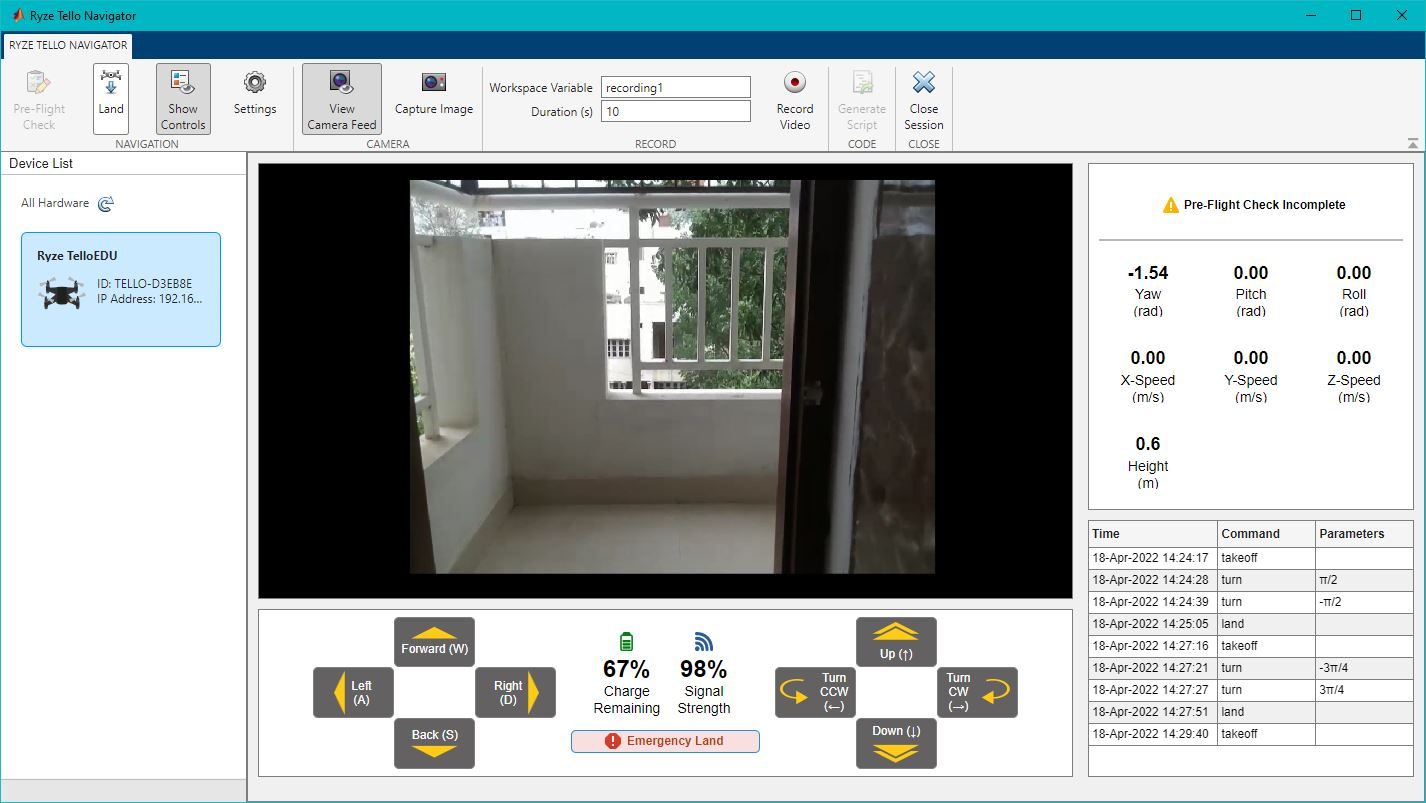
Ryze Tello Navigator vous aide à effectuer le décollage/atterrissage et à contrôler de manière interactive le drone Ryze Tello.
Remarque : Avant de lancer le décollage du drone, tenez compte des précautions générales de sécurité. Si vous ressentez des dommages pouvant survenir au drone et à ses environs pendant le décollage ou lors de l'exécution d'un contrôle de navigation manuel (comme mentionné dans les étapes suivantes), vous pouvez cliquer sur Atterrissage d'urgence . Un clic sur ce bouton déclenche un arrêt d'urgence des moteurs du drone, le faisant tomber au sol depuis la hauteur actuelle (pour les drones Tello EDU) ou force le drone à atterrir verticalement depuis sa position actuelle (pour les drones Tello).
| Étape | Action | Résultat |
|---|---|---|
| 1 |  Vérifiez que la charge de la batterie et la force du signal du drone, telles qu'affichées dans l'application, sont suffisantes pour effectuer le décollage et le contrôle. Vérifiez que la charge de la batterie et la force du signal du drone, telles qu'affichées dans l'application, sont suffisantes pour effectuer le décollage et le contrôle. | |
| 2 |  Cliquez sur Afficher le flux de la caméra pour vérifier que le flux de la caméra du drone fonctionne correctement. Cliquez sur Afficher le flux de la caméra pour vérifier que le flux de la caméra du drone fonctionne correctement. | L'application affiche l'aperçu, tel que vu par la caméra du drone avant le décollage. Plus tard, lorsque le drone bouge, l’aperçu sera mis à jour avec le flux en direct de la caméra. |
| 3 |  Appuyez sur la barre d'espace de votre clavier ou cliquez sur Décollage qui apparaît dans la section Navigation de la zone de la barre d'outils. Appuyez sur la barre d'espace de votre clavier ou cliquez sur Décollage qui apparaît dans la section Navigation de la zone de la barre d'outils. | Les moteurs du drone démarrent et le drone décolle à une altitude particulière et plane à cette position. Le bouton Take Off est remplacé par le bouton Land . |
| 4 | Effectuez une navigation manuelle du drone depuis l'application soit en cliquant sur les icônes respectives dans l'application, soit en utilisant votre clavier. | Le drone se déplace en fonction du contrôle de navigation que vous avez déclenché. Le flux de la caméra (aperçu), s'il est activé, est également mis à jour. Pour augmenter la zone de la fenêtre d'aperçu telle qu'elle apparaît dans l'application, vous pouvez masquer le volet qui affiche les boutons de contrôle manuel. Cliquez sur Afficher les contrôles pour désactiver le volet. Vous pouvez toujours utiliser les touches du clavier pour contrôler le drone. |
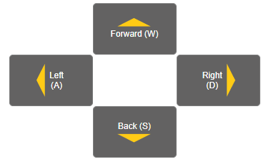
Clés WASD :
W – Avancer
A – Déplacer vers la gauche
S – Reculer
D – Déplacer vers la droite
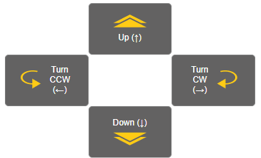
Touches fléchées :
▲ – Déplacez le drone vers le haut
▼ – Déplacez le drone vers le bas
◄ – Tournez le drone dans le sens inverse des aiguilles d'une montre
► – Tournez le drone dans le sens des aiguilles d'une montre
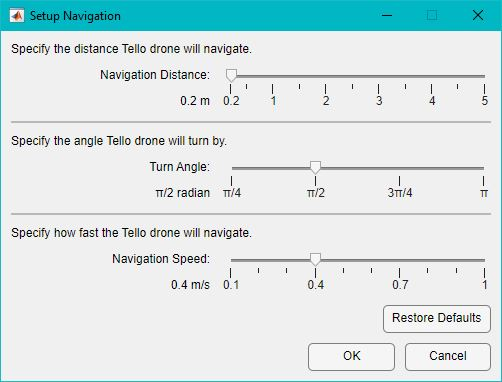
Vous pouvez modifier les paramètres de navigation que le drone utilise chaque fois que vous déclenchez un mouvement dans une direction particulière. Cliquez sur Paramètres pour ouvrir la boîte de dialogue Configurer la navigation et spécifiez les valeurs de distance, d'angle et de vitesse à l'aide des curseurs. Si vous souhaitez restaurer les valeurs par défaut (Distance de navigation : 0,2 m, Angle de virage : π/2, Vitesse de navigation : 0,4 m/s), cliquez sur Restaurer les valeurs par défaut dans la boîte de dialogue.

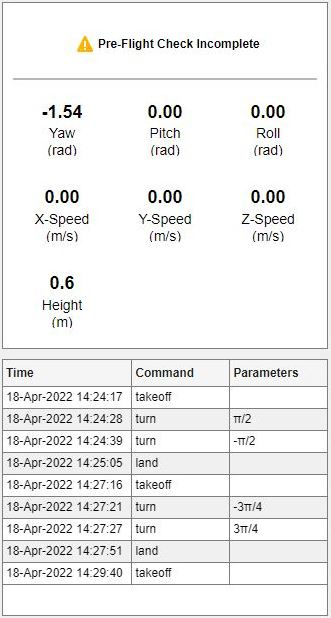
L'application affiche également les données de navigation en direct (telles que capturées par les capteurs du drone) ainsi que le journal des commandes que vous avez déclenchées à l'aide des boutons de navigation ou des touches du clavier. Ces informations apparaissent sur le panneau latéral droit.
Ryze Tello Navigator vous aide à capturer des images et à enregistrer des vidéos vues via la caméra FPV du drone Ryze Tello.
| Étape | Action | Résultat |
|---|---|---|
| 1 |  Capturez une image à la fois. Capturez une image à la fois. | L'image est stockée en tant que variable d'espace de travail. |
| 2 |  Définissez la variable d'espace de travail et la durée pour enregistrer la vidéo, puis cliquez sur Enregistrer la vidéo. Définissez la variable d'espace de travail et la durée pour enregistrer la vidéo, puis cliquez sur Enregistrer la vidéo. | La vidéo de la caméra du drone commence à être enregistrée pendant la durée spécifiée. Cliquez sur Arrêter pour arrêter l'enregistrement à tout moment pendant l'enregistrement et la vidéo est ensuite automatiquement enregistrée dans l'espace de travail sous forme de tableau d'images. |
Ryze Tello Navigator vous aide à générer un script Live Editor de la navigation que vous avez effectuée. Vous pouvez utiliser ce script pour définir la configuration initiale et la trajectoire de vol du drone, puis ajouter des algorithmes personnalisés pour effectuer des flux de travail supplémentaires.

Pour ce faire, cliquez sur Générer un script après avoir réussi à faire atterrir le drone.
| Avertissements | Problème et action recommandée |
|---|---|
| Niveau de batterie faible | L'application commence à afficher des avertissements si l'indication de charge restante affiche une valeur inférieure à 20 % et que le drone vole ou plane. Si le niveau de la batterie descend en dessous de 10 %, le drone atterrit automatiquement depuis sa position actuelle. Pour éviter cela, veillez à faire atterrir le drone à l'aide du bouton Atterrir dans l'application, puis remplacez la batterie du drone. |
| Faible force du signal | L'application affiche en permanence les valeurs de force du signal pendant que le drone vole. Il est recommandé de prendre les mesures nécessaires si la force du signal est inférieure à 20 % pour éviter de perdre le contrôle du drone. Si la connexion avec le drone est perdue, une boîte de dialogue apparaît affichant l'option de se reconnecter au drone. S'il échoue toujours, un message d'erreur s'affiche. |
La licence pour est disponible dans le fichier LICENSE.TXT de ce référentiel GitHub.
MATLAB Centrale
Copyright 2022 MathWorks, Inc.


