ROScribe
v0.0.4
Créez des packages ROS à l'aide de LLMS.
En utilisant une interface en langage naturel pour décrire les projets robotiques, Roscribe élimine la barrière de compétence de l'utilisation de ROS pour les débutants et économise du temps et des tracas pour les ingénieurs qualifiés. Roscribe combine la puissance et la flexibilité des modèles de grands langues (LLM) avec des techniques de réglage rapides pour capturer les détails de votre conception robotique et pour créer automatiquement un package ROS entier pour votre projet.
Roscribe construit un espace de travail ROS entier via une approche en plusieurs étapes agentique, où chaque étape se concentre sur un aspect spécifique de la conception du logiciel robot. En particulier, Roscribe vous aide avec les étapes suivantes:
Si vous êtes nouveau sur ROS, Roscribe sera votre mentor de robot (ics)? ️
Si vous êtes un utilisateur de ROS chevronné, Roscribe peut aider à créer un plan pour votre forfait ROS? ️
Roscribe est composé de 4 agents. La liste ci-dessous détaille les responsabilités de chaque agent, indiqué dans l'ordre d'interaction:
SpecAgent : aide au squelette global de votre projet. En termes de ROS, il construit le graphique ROS de votre projet, où chaque partie du graphique peut être générée par AI-AI ou tirée d'une réalosoire open-source.GenAgent : Compte tenu du graphique ROS, cet agent génère l'espace de travail ROS et le code pour chaque nœud ROS dans Python. Alternativement, il peut télécharger une implémentation open source pour le nœud ROS.PackAgent : Avec la connaissance de l'espace de travail ROS généré, cet agent crée un fichier de lancement de ROS qui fait apparaître les nœuds ROS. De plus, package.xml , CMakeLists.txt et README.md sont générés par cet agent.SupportAgent : Il s'agit de votre agent de support client, qui peut vous aider chaque fois que vous rencontrez une erreur lors de l'exécution de votre projet. L'agent a déjà accès à la disposition du projet et peut lire en interne les fichiers générés. La figure suivante illustre l'architecture de Roscribe: 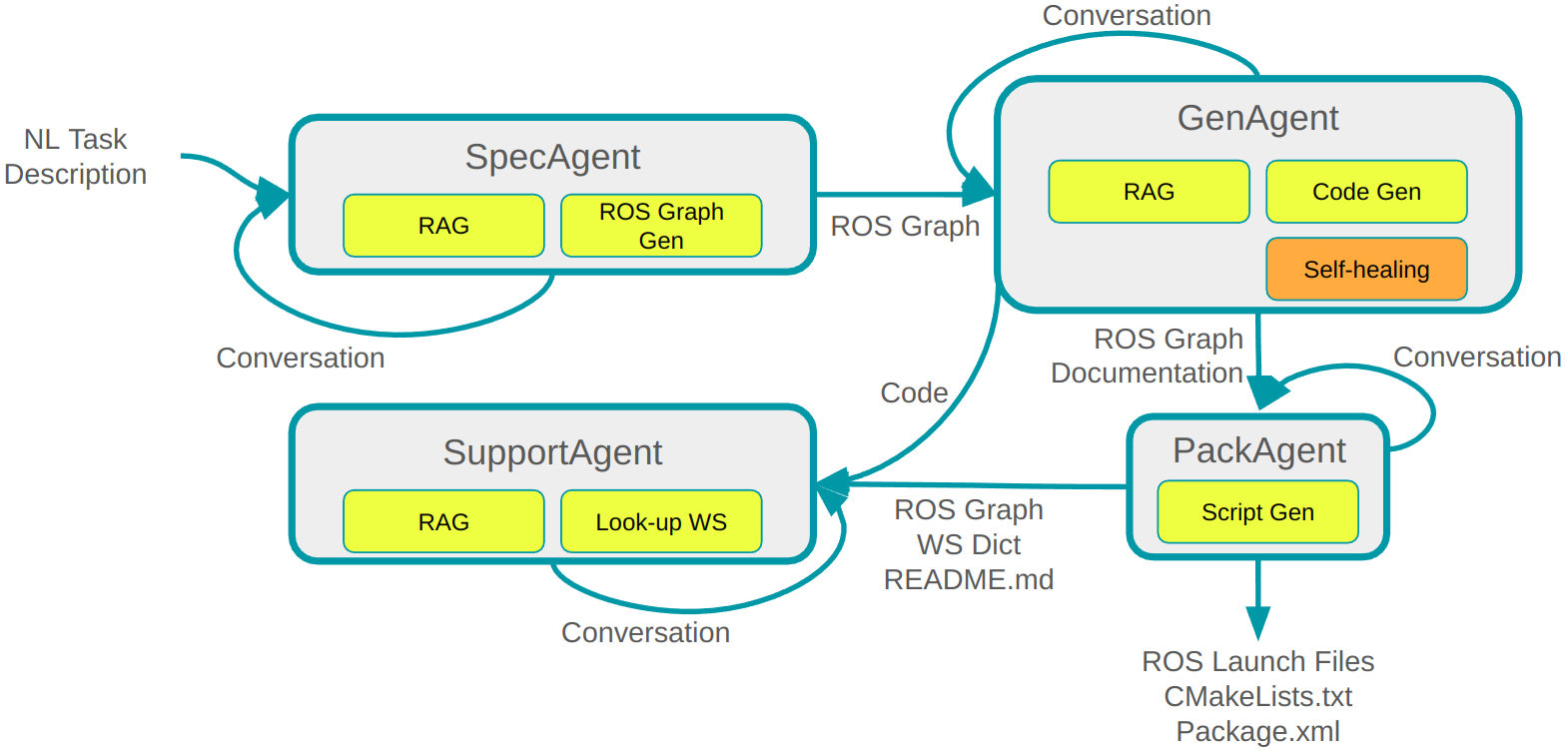
Veuillez consulter notre page Wiki pour apprendre à installer et à utiliser Roscribe dans vos projets robotiques:
Regarder à l'intérieur de Roscribe et l'idée de la plate-forme robotique basée sur LLM
Présentation des diapositives de l'atelier UCSD ROS 27 octobre 2023
Enregistrement vidéo de la présentation de l'atelier UCSD ROS 27 octobre 2023
Pour les demandes commerciales, telles que des emplois de conseil ou de contrat, veuillez contacter [email protected].
En tant que projet open source, nous encourageons tous les amateurs de robotique à contribuer à Roscribe. À chaque version, nous annoncerons la liste des nouveaux contributeurs.


