FREA
1.0.0
 |  |
2024-09-05 Berita menarik! FREA diterima CoRL 2024 untuk Oral Presentation ??!2024-08-10 Jelajahi halaman proyek kami, sekarang langsung di sini?!2024-08-10 Kode sekarang dirilis!2024-06-05 Makalah kami tersedia di Arxiv?!Repositori ini berisi implementasi makalah.
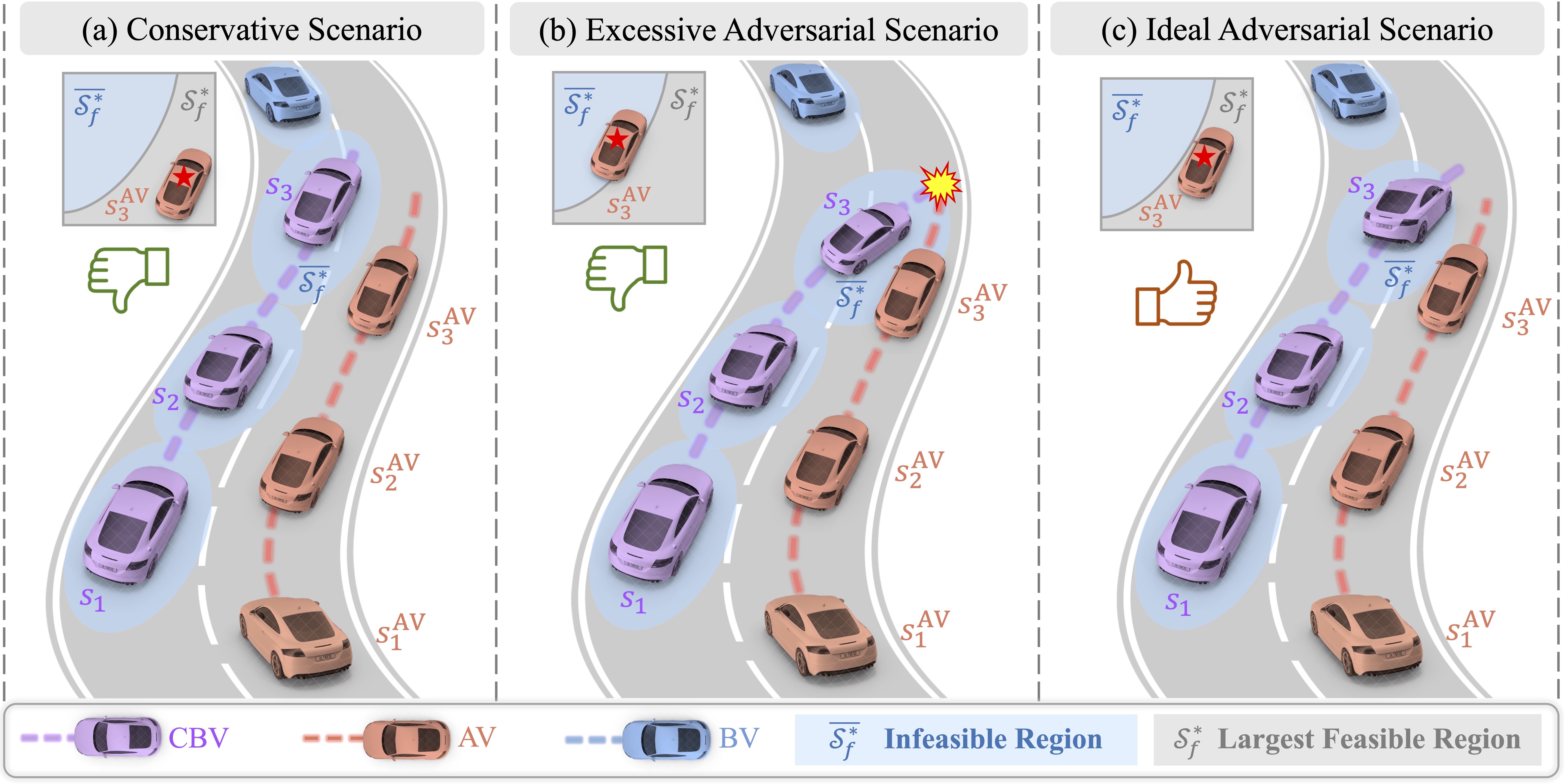
FREA: Pembuatan Skenario Kritis Keselamatan yang Dipandu Kelayakan dengan Permusuhan yang Wajar
Keyu Chen 1 , Yuheng Lei 2 , Hao Cheng 1 , Haoran Wu 1 , Wenchao Sun 1 , Sifa Zheng 1
1 Sekolah Kendaraan dan Mobilitas, Universitas Tsinghua 2 Universitas Hong Kong
Jika Anda merasa karya kami bermanfaat, Tolong beri kami bintang?!
? FREA menggabungkan kelayakan sebagai panduan untuk menghasilkan skenario yang merugikan namun layak untuk dilakukan AV, dan kritis terhadap keselamatan.
Sistem yang disarankan: Ubuntu 20.04 atau 22.04
Langkah 1: Instal Carla (disarankan 0.9.13)
Langkah 2: Siapkan lingkungan conda
conda create -n frea python=3.8
conda activate freaLangkah 3: Kloning repo git ini ke folder yang sesuai
git clone [email protected]:CurryChen77/FREA.gitLangkah 4: Masuk ke folder root repo dan instal paket:
cd FREA
pip install -r requirements.txt
pip install -e . # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Launch in another terminal
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_train.yaml --mode collect_feasibility_data # Merge data
python frea/feasibility/unify_offline_data.py Untuk menggunakan kumpulan data offline dalam makalah kami, unduh dari sini, masukkan ke dalam folder feasibility .
# Train optimal feasible value function of AV
python train_feasibility.py # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg fppo_adv_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FPPO-RS
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg fppo_rs_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train PPO
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg ppo_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg ppo.yaml --scenario_cfg fppo_adv_train.yaml --mode train_agent # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg ppo.yaml --scenario_cfg standard_train.yaml --mode train_agent # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Evaluation FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode analysis # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Evaluation FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode renderPastikan Evaluasi telah selesai dan hasilnya disimpan dalam folder.
# Process the recorded data
python eval_analysis/process_data/process_all_data.py
# Plot the evaluation result
python eval_analysis/plot_data/plot_evaluation_result.py # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Set world spectator
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_eval.yaml --mode eval -sp # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Visualize AV route
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_eval.yaml --mode eval -viz_route # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Visualize BEV map
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode renderJika Anda merasa makalah kami bermanfaat, silakan kutip kami melalui:
@inproceedings{
chen2024frea,
title={{FREA}: Feasibility-Guided Generation of Safety-Critical Scenarios with Reasonable Adversariality},
author={Keyu Chen and Yuheng Lei and Hao Cheng and Haoran Wu and Wenchao Sun and Sifa Zheng},
booktitle={8th Annual Conference on Robot Learning},
year={2024},
url={https://openreview.net/forum?id=3bcujpPikC}
}
Implementasi ini didasarkan pada kode dari beberapa repositori. Kami dengan tulus berterima kasih kepada penulis atas karya luar biasa mereka.


