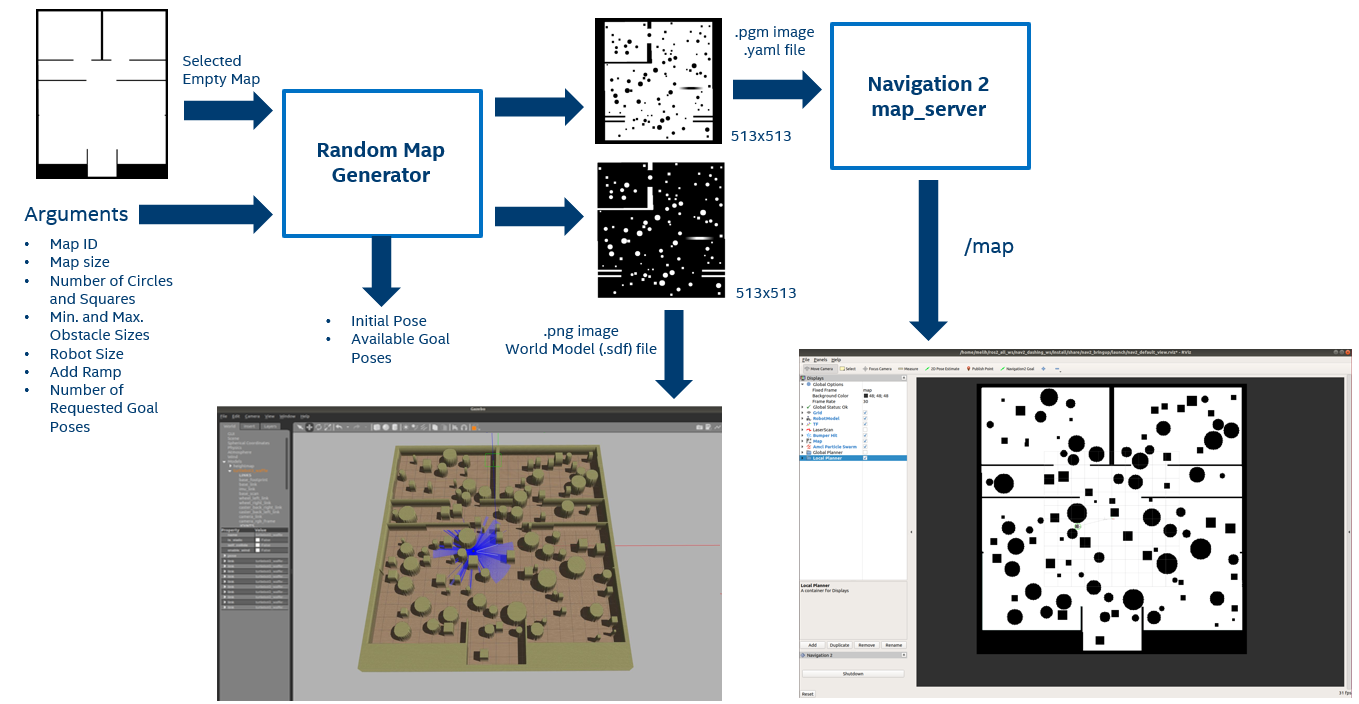
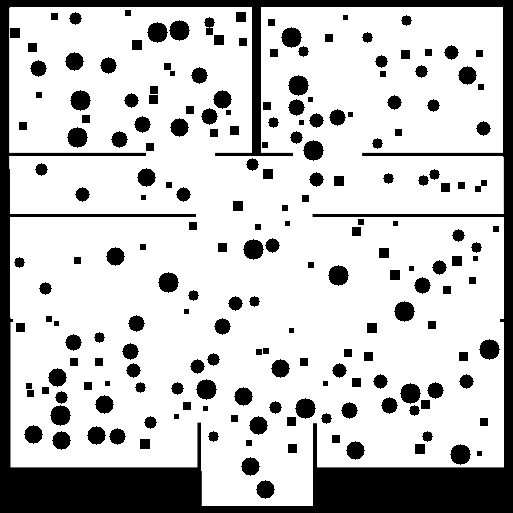
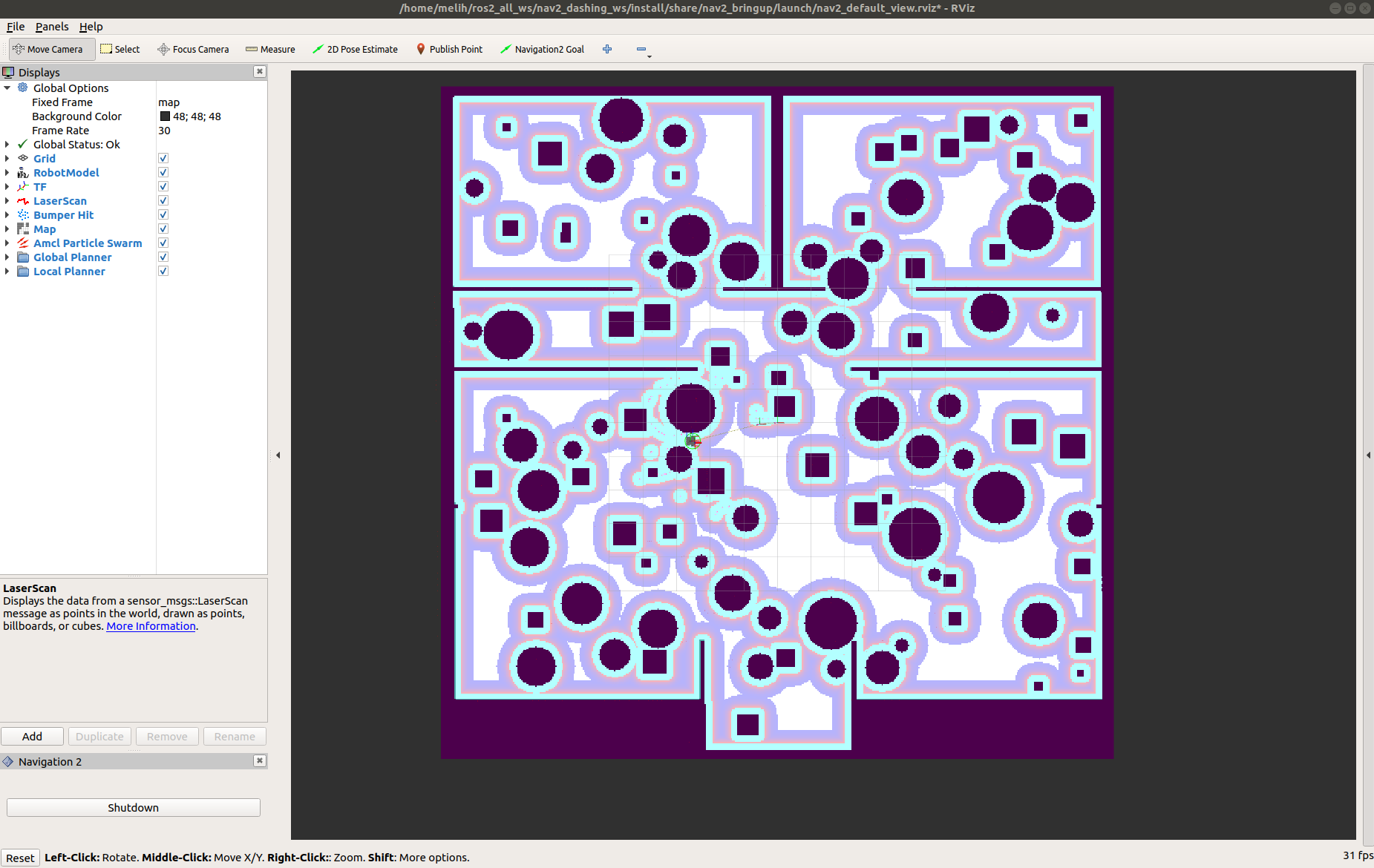
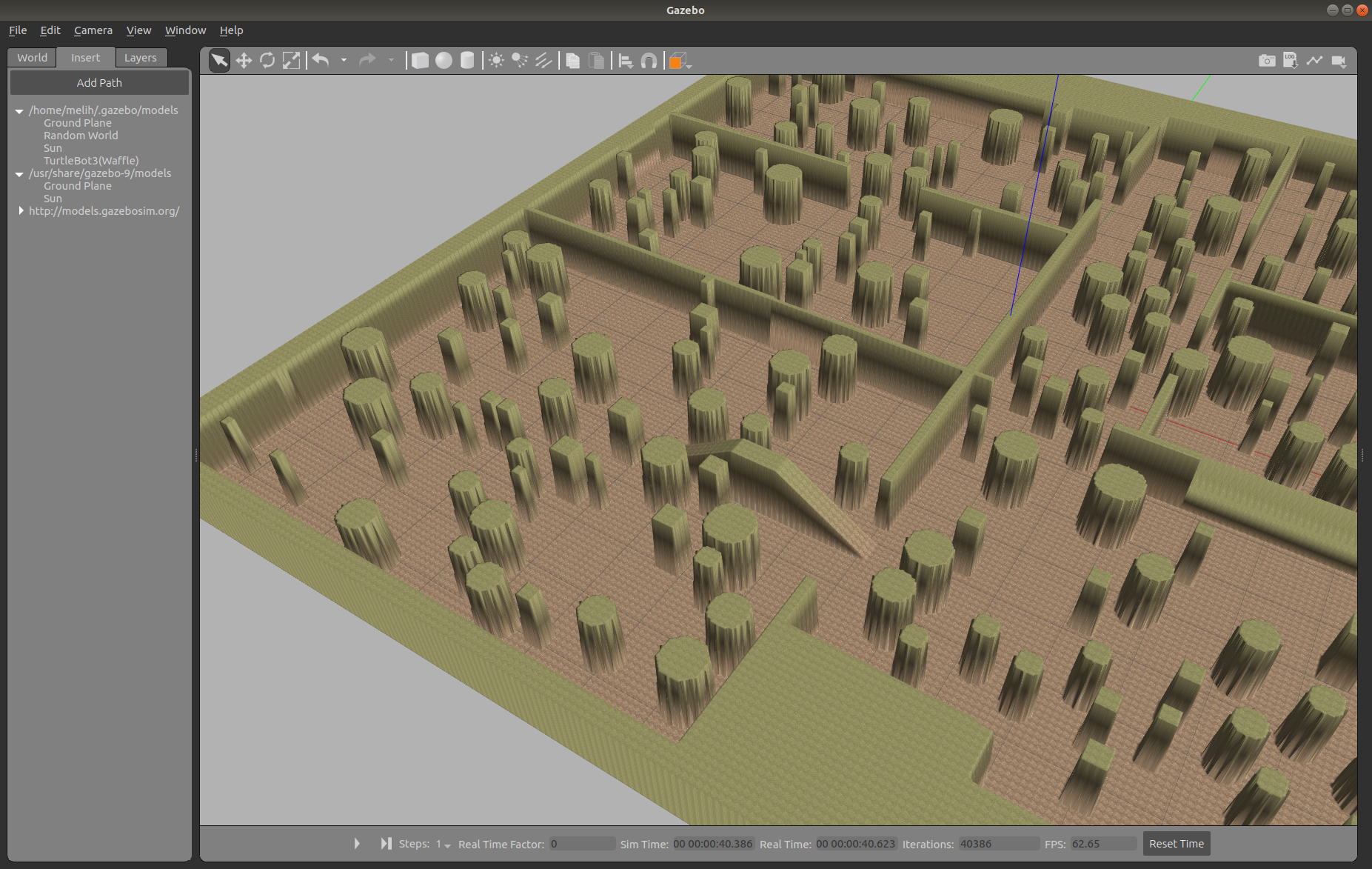
Alat ini membuat peta dan model dunia yang dihasilkan secara acak yang dapat digunakan oleh Navigasi 2 dan Gazebo. Ini menggunakan sebagian kecil dari kumpulan data HouseExpo. Ini adalah kumpulan gambar tata ruang dalam ruangan 2D kosong yang digambar tangan. Peta kosong terletak di direktori peta. Generator peta acak secara acak menempatkan rintangan di peta skala abu-abu. Peta harus dalam format .png. Saat ini, penambahan lingkaran, kotak, dan landai didukung. Ukuran, bentuk, jenis, dan jarak antar rintangan dapat dikonfigurasi oleh pengguna. Peta ketinggian Gazebo digunakan untuk membuat model dunia Gazebo dari peta yang dibuat secara acak. Direktori random_world dapat disalin di direktori .gazebo/model untuk digunakan dengan Gazebo. Ukuran peta yang dihasilkan harus 2^n+1 x 2^n+1. Jika tidak, ini tidak akan berfungsi dengan Gazebo. Ukuran model dunia di Gazebo ditingkatkan menjadi 20 meter x 20 meter.
sudo apt-get update
sudo apt-get upgrade
Instal OpenCV
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install libopencv-dev
cd nav2_random_map_generator
make
atau
cd src
g++ circle.cpp main.cpp map.cpp obstacle.cpp ramp.cpp rmg.cpp square.cpp -o random-map `pkg-config --cflags --libs opencv`
./map_generator <Map Id> <Number_of_Circles> <Number_of_Squares> <Robot_Size (px*0.03898)> <Map_Size(x)> <Map_Size(y)> <Min_Circle_Radius> <Max_Circle_Radius> <Min Square_Size> <Max_Circle_Radius> <Add Ramp> <Show_Map>
Contoh:
./map_generator 10 200 200 5 513 513 5 10 5 10 1 1
./map_generator h
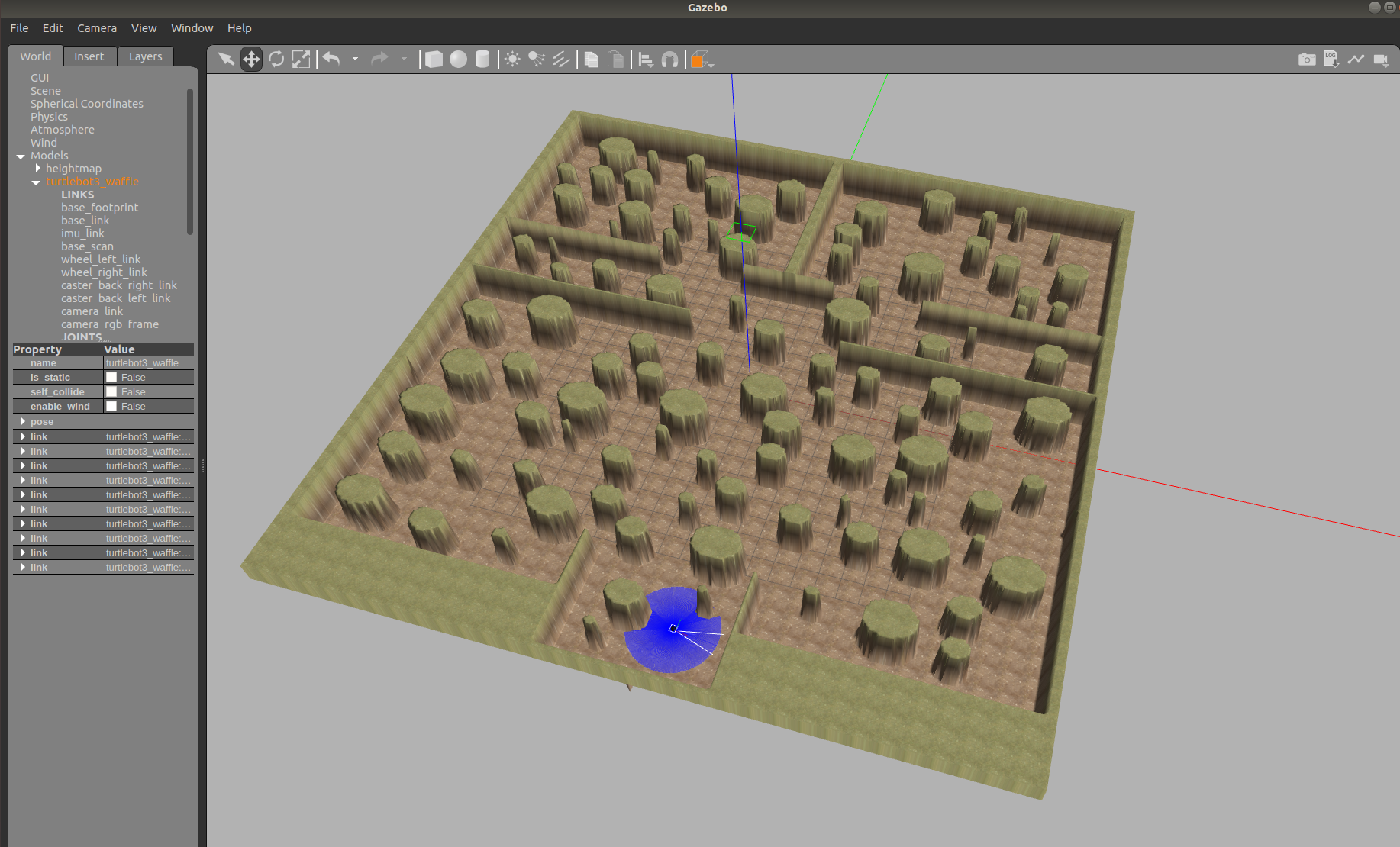
Video Tes TB3 Peta Ramdom
Video Uji Ramp Peta Ramdom


