carma platform
carma-system-4.5.0
| Pembuatan Gambar DockerHub | Alur Kerja Tes Unit | Kualitas Kode Sonar |
|---|---|---|
 |  |

CARMA SM memajukan penelitian dan pengembangan untuk mempercepat kesiapan pasar dan penerapan otomatisasi mengemudi kooperatif, sekaligus memajukan teknologi keselamatan, keamanan, data, dan kecerdasan buatan mengemudi otomatis. Hal ini mendorong kolaborasi dan partisipasi komunitas insinyur dan peneliti untuk meningkatkan pemahaman tentang otomatisasi penggerak kooperatif menggunakan perangkat lunak sumber terbuka (OSS) dan praktik manajemen proyek yang tangkas.
CARMA adalah platform yang dapat digunakan kembali dan diperluas untuk mengendalikan kendaraan otomatis (AV) yang terhubung dengan SAE level 2. Ini menyediakan API yang kaya dan umum untuk plugin pihak ketiga yang mengimplementasikan algoritma panduan kendaraan untuk merencanakan lintasan kendaraan. Itu ditulis dalam C++ dan berjalan di lingkungan Sistem Operasi Robot (ROS) di Ubuntu. Platform ini dapat digunakan kembali pada berbagai kendaraan yang dilengkapi dengan baik. Migrasi telah dimulai dari framework ROS 1 ke ROS 2.
Readme ini diperbarui: 23 Oktober 2020
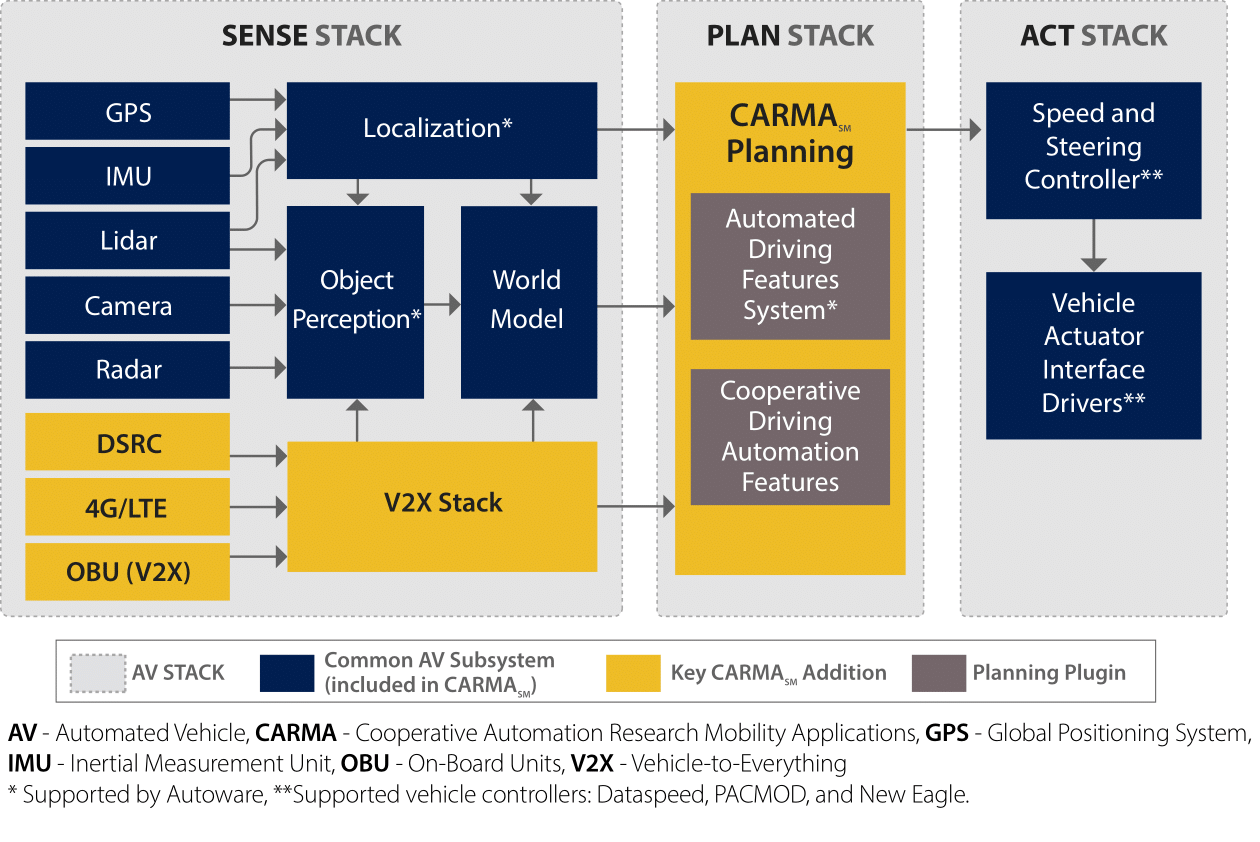
Mengelola pergerakan kendaraan otomatis melibatkan tiga aspek. Yang pertama adalah navigasi, juga dikenal sebagai lokalisasi , yang merupakan tindakan menentukan di mana kendaraan saat ini berada sehubungan dengan bumi dan sehubungan dengan jalur perjalanan yang diinginkan (rute yang direncanakan). Yang kedua adalah panduan, juga dikenal sebagai perencanaan lintasan , yang mencakup proses menentukan bagaimana kendaraan bergerak dari lokasinya saat ini ke tujuannya. Tujuan dan rute akan diserahkan kepada algoritma panduan, dan mereka kemudian menentukan bagaimana pergerakan kendaraan perlu disesuaikan setiap saat agar dapat mengikuti rute tersebut. Aspek ketiga dari gerak kendaraan otomatis adalah kendali , yang mencakup penggerakan perangkat fisik kendaraan untuk mendorong perubahan gerak (untuk kendaraan darat hal ini biasanya menyebabkan roda berputar lebih cepat atau lebih lambat dan memutar roda kemudi). Oleh karena itu, solusi navigasi menjadi masukan pada fungsi panduan, dan solusi panduan menjadi masukan pada fungsi kontrol. Saat kendaraan bergerak, tentu saja lokasinya berubah sehingga fungsi navigasi perlu terus memperbarui solusinya dan siklus berulang secepat yang diperlukan untuk menghasilkan pergerakan kendaraan yang mulus dan akurat. Laju iterasi sangat ditentukan oleh kecepatan kendaraan yang diharapkan.
Platform CARMA menyediakan fungsi navigasi dan panduan untuk kendaraan induknya, serta beberapa fungsi kontrol. Hal ini bergantung pada perangkat keras pengontrol tingkat rendah untuk menyediakan fungsi kontrol lainnya. Versi Platform CARMA saat ini memberikan otonomi SAE level 3+, dengan kontrol kecepatan dan kemudi.

Dokumentasi pengaturan, pengoperasian, dan desain Platform CARMA dapat ditemukan di halaman proyek Confluence. Dokumentasi tambahan dapat ditemukan di halaman Dokumentasi Kode Sumber Doxygen.
Versi saat ini dan riwayat rilis platform perangkat lunak CARMA: Catatan Rilis CARMA
Catatan Struktur Repo: Cabang master dan pengembangan repo ini (dan semua repo lainnya di organisasi GitHub usdot-fhwa-stol) sekarang mencerminkan kode dan dokumentasi CARMA generasi ketiga, yang disebut CARMA3. Ia menggunakan Autoware untuk menyediakan kemampuan otomatisasi SAE level 2 dan 3. Kode CARMA2 lama masih didukung. Itu digunakan secara luas oleh FHWA selama tahun 2018 untuk percobaan SAE level 1. Untuk bekerja dengan basis kode tersebut, silakan periksa cabang integrasi CARMA2 dan buat permintaan penarikan ke cabang tersebut (menggunakan proses kontribusi yang diuraikan di bawah).
Catatan Versi ROS: Rilis 3.11 adalah versi final Platform CARMA yang hanya berisi kode ROS1. Cabang pengembangan dan versi mendatang akan berisi campuran kode ROS1 dan ROS2 dalam sistem campuran hingga semua kode telah sepenuhnya di-porting ke ROS2. Anda dapat mempelajari lebih lanjut tentang sistem ini dan upaya migrasi ROS2 pada pertemuan di sini: CARMA Platform ROS2 Docs
Arah pengembangan dan rencana pelepasan ekosistem CARMA saat ini dapat ditemukan di sini: Peta Jalan CARMA
Sistem Platform CARMA saat ini beroperasi sebagai gabungan komponen ROS 1 Noetic dan ROS 2 Foxy. Meskipun hampir semua komponen telah ditingkatkan ke ROS 2 Foxy, sejumlah kecil konten ROS 1 Noetic masih ada di dalam sistem, termasuk beberapa paket di repositori ini. Untuk informasi lebih lanjut, silakan lihat dokumentasi yang relevan di repositori carma-config.
Dokumentasi menjelaskan arsitektur perangkat lunak dalam satu kendaraan CARMA. Mungkin ada beberapa kendaraan yang beroperasi bersama-sama, berkomunikasi satu sama lain melalui DSRC atau sarana seluler. Mereka juga dapat berkomunikasi dengan infrastruktur pinggir jalan menggunakan DSRC atau seluler. Namun, komunikasi antar komponen perangkat lunak dalam satu kendaraan sebagian besar dilakukan melalui kerangka Sistem Operasi Robot (ROS). Tidak ada komunikasi ROS antara kendaraan tetangga. Arsitektur Sistem CARMA3
Untuk informasi tentang arsitektur CARMA2, silakan lihat Arsitektur Sistem CARMA2
Silakan lihat halaman dokumen Desain Detail untuk spesifikasi desain detail CARMA dan informasi tambahan lainnya. Halaman Desain Detail
Dokumentasi dan instruksi pengembangan yang berguna untuk pengaturan lingkungan pengembangan untuk Platform CARMA dapat ditemukan di halaman berikut:
Panduan pengembang plugin untuk CARMA3 akan segera hadir.
Untuk deskripsi pendekatan pengembangan plug-in untuk CARMA2, silakan lihat Panduan Pengembang CARMA 2.7
Panduan pengguna untuk CARMA3 akan segera hadir.
Untuk deskripsi fungsi khusus CARMA2 pada Cadillac SRX, lihat Panduan Pengguna CARMA
Panduan administrator untuk CARMA3 akan segera hadir.
Untuk informasi administratif tentang CARMA2, termasuk konfigurasi kendaraan dan PC pengembang, langkah-langkah pembuatan, penerapan, dan pengujian yang diperlukan untuk menginstal dan menjalankan Platform CARMA, silakan lihat Panduan Administrator
CARMA Platform SM adalah platform perangkat lunak sumber terbuka (OSS) yang dapat diunduh dan dirancang agar dapat diperluas dan digunakan kembali untuk berbagai tujuan penelitian guna memajukan inovasi untuk otomatisasi mengemudi kooperatif. Hal ini memungkinkan komunikasi antara kendaraan, pengguna jalan seperti pejalan kaki, pengendara sepeda, dan skuter, dan perangkat infrastruktur yang mampu berkomunikasi. Hal ini mendorong kolaborasi antara komunitas insinyur dan peneliti untuk mempercepat pengembangan, pengujian, dan evaluasi otomatisasi mengemudi kooperatif sekaligus meningkatkan keselamatan, keamanan, data, dan penggunaan kecerdasan buatan dalam teknologi mengemudi otomatis.
Platform CARMA didistribusikan sebagai kumpulan beberapa paket independen yang dihosting di repositori Github terpisah. Paket-paket ini memfasilitasi pengoperasian Platform CARMA dengan konfigurasi perangkat keras yang berbeda atau memungkinkannya mendukung mode operasi yang berbeda. Untuk memasukkan salah satu paket ini ke dalam build sistem Platform CARMA Anda, harap kloning repositori Github ke dalam folder src/ ruang kerja Catkin yang sama dengan repositori ini. Sistem pembangunan Catkin akan memverifikasi bahwa dependensi telah diselesaikan dengan tepat dan membangun paket yang baru disertakan saat Anda menjalankan catkin_make berikutnya. Daftar lengkap paket yang tersedia untuk CARMA3 meliputi:
Daftar lengkap paket yang tersedia dapat ditemukan di organisasi USDOT FHWA STOL Github.
CARMA Cloud SM adalah layanan perangkat lunak sumber terbuka (OSS) berbasis cloud yang dapat diunduh dan menyediakan informasi untuk mendukung dan memungkinkan otomatisasi mengemudi kooperatif. Hal ini memungkinkan komunikasi dengan layanan cloud dan kendaraan, pengguna jalan seperti pejalan kaki, pengendara sepeda, dan skuter, serta perangkat infrastruktur yang mampu berkomunikasi. Hal ini mendorong kolaborasi antara komunitas insinyur dan peneliti untuk mempercepat pengembangan, pengujian, dan evaluasi otomatisasi mengemudi kooperatif sekaligus meningkatkan keselamatan, keamanan, data, dan penggunaan kecerdasan buatan dalam teknologi mengemudi otomatis. Kode sumber untuk CARMA Cloud dapat ditemukan di sini di GitHub.
Selamat datang di panduan kontribusi CARMA. Harap baca panduan ini untuk mempelajari proses pengembangan kami, cara mengajukan permintaan penarikan dan peningkatan, serta cara membuat dan menguji perubahan Anda pada proyek ini. Panduan Berkontribusi CARMA
Silakan baca Kode Etik CARMA kami yang menguraikan harapan kami terhadap peserta dalam komunitas CARMA, serta langkah-langkah untuk melaporkan perilaku yang tidak dapat diterima. Kami berkomitmen untuk menyediakan komunitas yang ramah dan menginspirasi bagi semua orang dan berharap kode etik kami dihormati. Siapa pun yang melanggar kode etik ini dapat dilarang dari komunitas.
Tim pengembangan ingin mengucapkan terima kasih kepada orang-orang yang telah memberikan kontribusi langsung terhadap desain dan kode dalam repositori ini. Atribusi CARMA
Dengan berkontribusi pada Aplikasi Mobilitas Penelitian Otomatis Terhubung (CARMA) Federal Highway Administration (FHWA), Anda setuju bahwa kontribusi Anda akan dilisensikan di bawah lisensi Apache License 2.0 miliknya. Lisensi CARMA
Agensi: DOT
Deskripsi Singkat: Aplikasi Mobilitas Penelitian Otomasi Kooperatif (CARMA) adalah platform perangkat lunak sumber terbuka (OSS) yang berjalan pada komputer di dalam kendaraan, dan komputer tersebut berinteraksi dengan perangkat kendaraan untuk memungkinkan penelitian, pengembangan, dan pengujian kendaraan otomatis kooperatif. Komputer kemudian memberikan informasi yang dibutuhkan kendaraan untuk berinteraksi dan bekerja sama dengan infrastruktur dan kendaraan lain. Tahap I proyek ini mengawali armada CARMA generasi berikutnya dengan mengembangkan infrastruktur platform umum yang akan mendukung visi strategis FHWA untuk Cooperative Automated Sistem Mengemudi (CADS). Tahap I juga mengembangkan Integrated Highway Prototype (IHP) dengan mengintegrasikan aplikasi yang sudah ada dan jenis kendaraan baru yaitu truk berat ke dalam armada CARMA. Lima penerapan berikut merupakan bidang penelitian utama: (1) Peleton Kendaraan, (2) Pendekatan dan Keberangkatan Persimpangan Bersinyal, (3) Harmonisasi Kecepatan yang dipandu Infrastruktur, dan (4) Perubahan Jalur Koperasi, dan (5) Penggabungan Ramp Koperasi. Tahap II Proyek ini akan memajukan CADS, yang dikembangkan pada platform penelitian CARMA FHWA untuk memungkinkan pengujian strategi arbitrase dan negosiasi. Pada akhirnya, proyek ini akan meningkatkan efisiensi infrastruktur dan mengurangi kemacetan lalu lintas. Salah satu tujuan proyek ini adalah untuk mempercepat transfer teknologi dan penerapan aplikasi kendaraan kooperatif melalui kolaborasi open source dengan industri dan pemangku kepentingan. Proyek ini akan memungkinkan kemampuan pengujian kendaraan ringan Society of Engineers (SAE) Level 2 dan Level 3 (L2/3) dan mengembangkan armada empat kendaraan berat SAE L2/3. Proyek ini juga akan mengembangkan konsep tingkat tinggi untuk Manajemen dan Operasi Sistem Transportasi (TSMO) seputar penggunaan teknologi mengemudi otomatis. Lebih lanjut, proyek ini akan mengidentifikasi skenario Manajemen Insiden Lalu Lintas (TIM) yang memberikan peningkatan strategi dan strategi baru untuk kasus penggunaan responden pertama yang berinteraksi dengan ADS dan menggunakan ADS. Armada FHWA baru akan digunakan untuk membuat prototipe skenario untuk masing-masing kategori kasus penggunaan berikut: (1) Perjalanan Dasar, (2) Zona Kerja, (3) Manajemen Insiden Lalu Lintas, dan (4) Cuaca. Pengujian ini akan memberikan data objektif untuk memberikan informasi kepada pemangku kepentingan tentang dampak ADS dan kemungkinan strategi penggunaan ADS guna meningkatkan operasi.
Status: Beta
Tag: transportasi, otomatisasi mengemudi kooperatif, kendaraan terhubung, sistem transportasi cerdas, C++, java, python, buruh pelabuhan
Jam kerja: 200
Nama Kontak: James Lieu
Hubungi Telepon: (202) 366-3000
Silakan klik logo CARMA di bawah untuk mengunjungi situs web CARMA Federal Highway Adminstration (FHWA). Untuk informasi lebih lanjut, hubungi [email protected].

Untuk dukungan teknis dari tim CARMA, silakan hubungi meja bantuan CARMA di [email protected].