open3d_slam
1.0.0
open3d_slam は、ROS と統合された SLAM 用の C++ (cpp) ライブラリです。
主要連絡先:エド・イェラヴィッチ ([email protected])
著者:エド・イェラヴィッチ、ジュリアン・ヌーバート、マルコ・ヒッター
ポスターと要約:リンク
ドキュメント:リンク
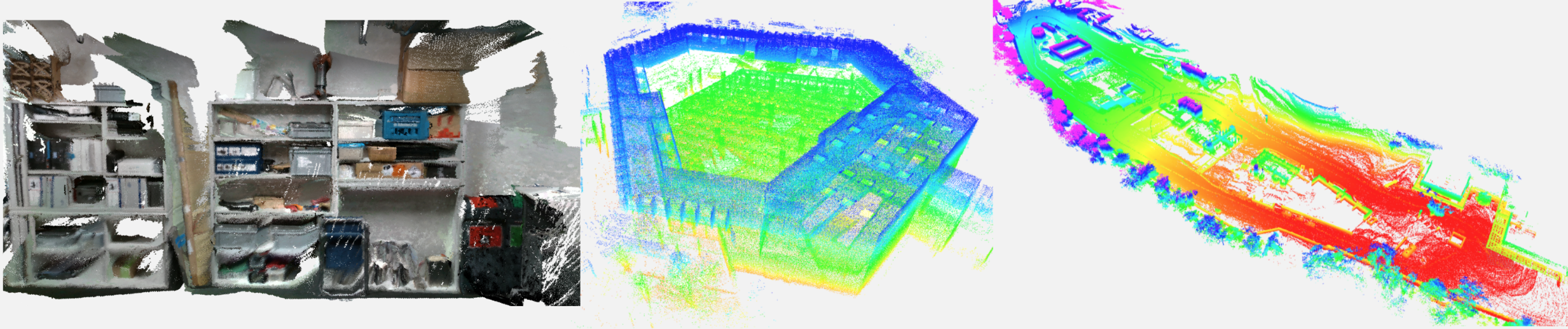
open3d_slam と他の SLAM ライブラリの主な違いは、open3d_slam がシンプルで教育目的で使用されるように設計されていることです。実際、open3d_slam は、基本的な形式で確立されたアルゴリズムのみを使用します。これにより、新規参入者がこの分野に参入しやすくなると期待しています。ポイントクラウドで動作し、IMU などの追加入力は必要ありません。 Open3D_slam は、マップを最初から構築することも、特定のマップ内でローカライズすることもできます。指定されたマップを新しい測定値で拡張することもできます。
私たちは Open3D に基づいて実装しています。Open3D は、3D データ処理用の、よく保守され、高性能なライブラリです。
ドキュメントとサンプル データセットは、open3d_slam ドキュメントにあります。
ROS プロジェクトで Open3D を簡単に使用できるように、Open3D 用の catkin ラッパーを提供します。 open3d_catkin/README.md のドキュメントを参照してください。
この成果が役立つと思われる場合、または研究に使用する場合は、対応する成果を引用することを検討してください。
@inproceedings{jelavic2022open3d,
title={Open3D SLAM: Point Cloud Based Mapping and Localization for Education},
author={Jelavic, Edo and Nubert, Julian and Hutter, Marco},
booktitle={Robotic Perception and Mapping: Emerging Techniques, ICRA 2022 Workshop},
pages={24},
year={2022},
organization={ETH Zurich, Robotic Systems Lab}
}


