ReturnVisitRobot
1.0.0
これは、保険の再訪問に使用されるアウトバウンド コール ロボットです。このプロジェクトでは、コアのテキスト ロボット部分のみが保持されます。 中心的な機能プロセスは次のとおりです。
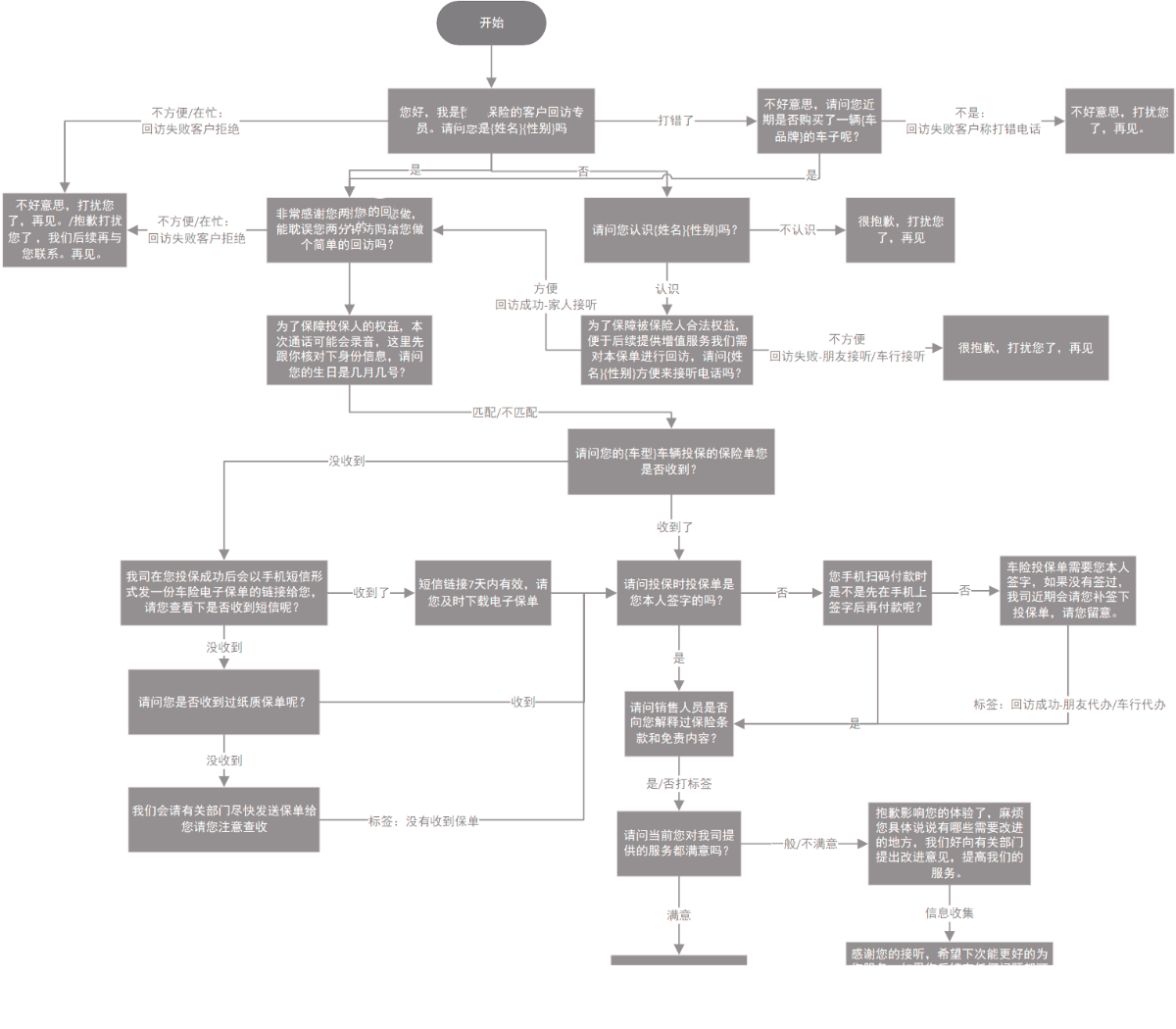
このプロジェクトは、rasa に基づいた有限状態マシンに基づいて対話応答戦略を書き直します。テキスト ロボットを構築したい友人にとって、何らかの参考になるはずです。
設定では、confg.yml ファイルでパイプラインを変更できます。パイプラインの具体的な設定方法については、Rasa 公式 Web サイト https://rasa.com/docs/rasa/model-configuration を参照してください。
以下は 2 つのカスタム コンポーネントの構成例です。
記憶に基づく対話応答戦略
policies:
- name: policy.memoization.MemoizationPolicy
- name: TEDPolicy
max_history: 20
epochs: 15
batch_size: 50
- name: RulePolicy
core_fallback_threshold: 0.3
enable_fallback_prediction: True
core_fallback_action_name: "action_default_fallback"
または有限状態マシン (FSM) に基づく
policies:
- name: policy.fsm_policy.FsmPolicy
- name: TEDPolicy
max_history: 20
epochs: 15
batch_size: 50
- name: RulePolicy
core_fallback_threshold: 0.3
enable_fallback_prediction: True
core_fallback_action_name: "action_default_fallback"
電車
python main.py train
走る
#开启动作响应服务器,默认5055端口
python main.py run actions
#开启对话shell,如果使用pycharm注意勾选emulate terminal
python main.py shell
#第一句请输入内置意图:开始
Your input:开始
six~=1.16.0
rasa~=3.1.0
zlib~=1.2.12
tqdm~=4.64.0
pip install -r requirements.txt
rasa run -m xx.tar.gz(模型文件) -p 8787(端口号)


