tacto
1.0.0
![]()
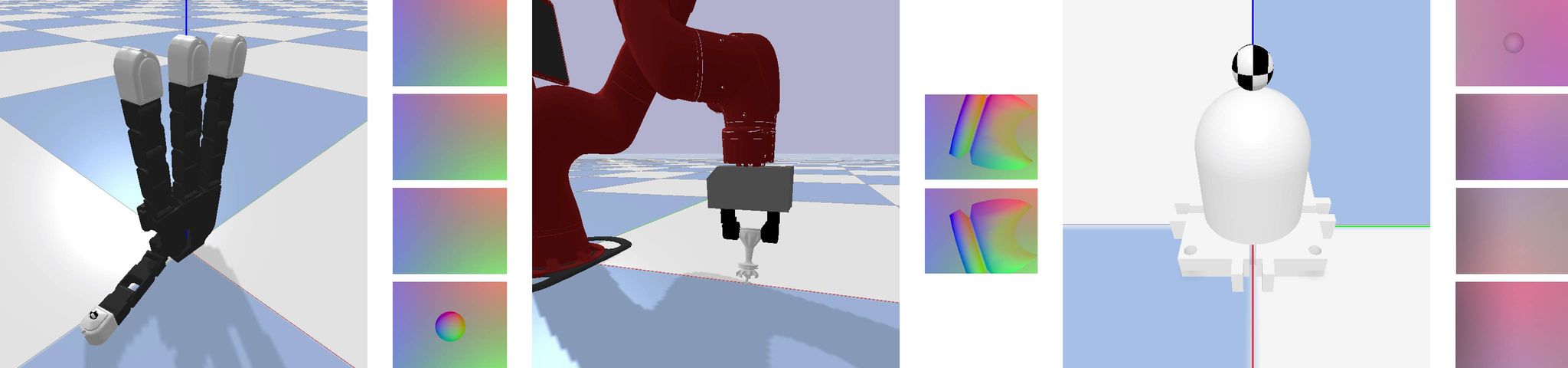
이 패키지는 DIGIT와 같은 비전 기반 촉각 센서용 시뮬레이터를 제공합니다. PyBullet과의 통합을 위한 모델과 터치 판독 렌더러를 제공합니다. 자세한 내용은 해당 논문 TACTO: 고해상도 비전 기반 촉각 센서를 위한 빠르고 유연한 오픈 소스 시뮬레이터를 참조하십시오.
참고: 시뮬레이터는 접촉의 물리적으로 정확한 역학(예: 변형, 마찰)을 제공하기 위한 것이 아니라 기존 물리 엔진에 의존합니다.
업데이트 및 토론을 보려면 www.touch-sensing.org 커뮤니티의 #TACTO 채널에 가입하세요.
선호되는 설치 방법은 PyPi를 사용하는 것입니다.
pip install tacto또는 다음을 사용하여 저장소를 수동으로 복제하고 패키지를 설치할 수 있습니다.
git clone https://github.com/facebookresearch/tacto.git
cd tacto
pip install -e . 이 패키지에는 여러 구성 요소가 포함되어 있습니다.
다음 예제를 실행하려면 추가 패키지(torch, gym, pybulletX)가 필요합니다. pip install -r requirements/examples.txt 로 설치할 수 있습니다.
PyBullet과 함께 TACTO를 사용하는 방법에 대한 기본 예는 [TBD]를 참조하세요.
렌더러 엔진만 사용하는 방법에 대한 예는 example/demo_render.py를 참조하세요.
PyBullet과 함께 시뮬레이터를 사용하는 방법에 대한 고급 예제를 보려면 예제 폴더를 살펴보세요.
참고: 렌더러에는 화면이 필요합니다. 헤드리스 렌더링의 경우 GPU 및 CUDA 드라이버가 있는 "EGL" 모드를 사용하거나 CPU가 있는 "OSMESA"를 사용하세요. 자세한 내용은 PyRender를 참조하세요.
또한 다음을 통해 패치된 PyOpenGL 버전을 설치하세요.
pip install git+https://github.com/mmatl/pyopengl.git@76d1261adee2d3fd99b418e75b0416bb7d2865e6
그런 다음 헤드리스 렌더링에 사용할 엔진을 지정할 수 있습니다. 예를 들어 다음과 같습니다.
import os
os.environ["PYOPENGL_PLATFORM"] = "osmesa" # osmesa cpu rendering
Ubuntu 에서 실험을 수행하는 것이 좋습니다.
macOS 의 경우 우리가 알고 있듯이 pybullet.GUI와 pyrender 사이에 몇 가지 시각화 문제가 있습니다. 해결 가능한지 알려주시면 리포지토리에서 정보를 공유해드리겠습니다!
이 프로젝트는 LICENSE 파일에 있는 MIT 라이선스에 따라 라이선스가 부여됩니다.
연구에 이 프로젝트를 사용하는 경우 다음을 인용해 주세요.
@Article { Wang2022TACTO ,
author = { Wang, Shaoxiong and Lambeta, Mike and Chou, Po-Wei and Calandra, Roberto } ,
title = { {TACTO}: A Fast, Flexible, and Open-source Simulator for High-resolution Vision-based Tactile Sensors } ,
journal = { IEEE Robotics and Automation Letters (RA-L) } ,
year = { 2022 } ,
volume = { 7 } ,
number = { 2 } ,
pages = { 3930--3937 } ,
issn = { 2377-3766 } ,
doi = { 10.1109/LRA.2022.3146945 } ,
url = { https://arxiv.org/abs/2012.08456 } ,
}

