FREA
1.0.0
 |  |
2024-09-05 신나는 소식! FREA는 구두 발표를 위해 CoRL 2024에서 승인되었습니다 ??!2024-08-10 프로젝트 페이지를 살펴보세요. 이제 여기에 라이브로?!2024-08-10 코드가 공개되었습니다!2024-06-05 우리 논문이 Arxiv에 올라왔나요?!이 저장소에는 논문의 구현이 포함되어 있습니다.
FREA: 타당성 있는 적대성을 갖춘 타당성 기반 안전 중요 시나리오 생성
Keyu Chen 1 , Yuheng Lei 2 , Hao Cheng 1 , Haoran Wu 1 , Wenchao Sun 1 , Sifa Zheng 1
1 칭화대학교 자동차 및 모빌리티 학부 2 홍콩대학교
저희 작업이 유용하다고 생각하시면 별점을 주세요?!
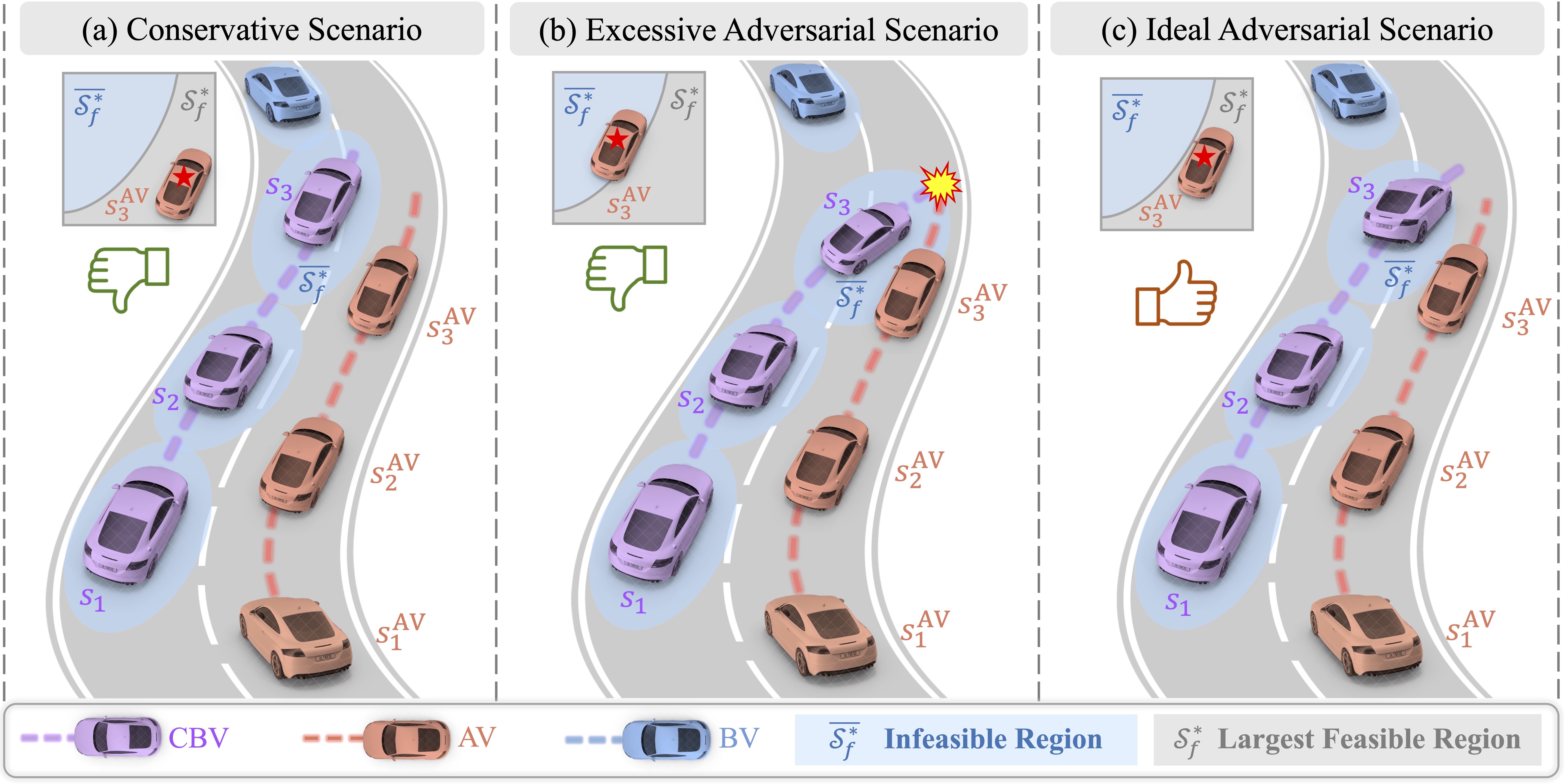
? FREA는 적대적이지만 AV 실행 가능하고 안전이 중요한 시나리오를 생성하기 위한 지침으로 타당성을 통합합니다.
권장 시스템: Ubuntu 20.04 또는 22.04
1단계: Carla 설치(0.9.13 권장)
2단계: Conda 환경 설정
conda create -n frea python=3.8
conda activate frea3단계: 이 git repo를 적절한 폴더에 복제합니다.
git clone [email protected]:CurryChen77/FREA.git4단계: repo 루트 폴더를 입력하고 패키지를 설치합니다.
cd FREA
pip install -r requirements.txt
pip install -e . # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Launch in another terminal
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_train.yaml --mode collect_feasibility_data # Merge data
python frea/feasibility/unify_offline_data.py 여기에서 다운로드한 논문에서 오프라인 데이터세트를 사용하려면 해당 데이터세트를 feasibility 폴더에 넣으세요.
# Train optimal feasible value function of AV
python train_feasibility.py # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg fppo_adv_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FPPO-RS
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg fppo_rs_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train PPO
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg ppo_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg ppo.yaml --scenario_cfg fppo_adv_train.yaml --mode train_agent # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg ppo.yaml --scenario_cfg standard_train.yaml --mode train_agent # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Evaluation FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode analysis # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Evaluation FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode render평가가 완료되었고 결과가 폴더에 저장되었는지 확인하세요.
# Process the recorded data
python eval_analysis/process_data/process_all_data.py
# Plot the evaluation result
python eval_analysis/plot_data/plot_evaluation_result.py # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Set world spectator
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_eval.yaml --mode eval -sp # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Visualize AV route
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_eval.yaml --mode eval -viz_route # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Visualize BEV map
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode render저희 논문이 유용하다고 생각하시면 다음을 통해 저희를 인용해 주시기 바랍니다.
@inproceedings{
chen2024frea,
title={{FREA}: Feasibility-Guided Generation of Safety-Critical Scenarios with Reasonable Adversariality},
author={Keyu Chen and Yuheng Lei and Hao Cheng and Haoran Wu and Wenchao Sun and Sifa Zheng},
booktitle={8th Annual Conference on Robot Learning},
year={2024},
url={https://openreview.net/forum?id=3bcujpPikC}
}
이 구현은 여러 저장소의 코드를 기반으로 합니다. 훌륭한 작업을 해주신 작가님들께 진심으로 감사드립니다.


