open3d_slam
1.0.0
open3d_slam은 ROS 통합이 포함된 SLAM용 C++(cpp) 라이브러리입니다.
주요 연락처: Edo Jelavic ([email protected])
저자: Edo Jelavic, Julian Nubert, Marco Hutter
포스터 및 초록: 링크
문서: 링크
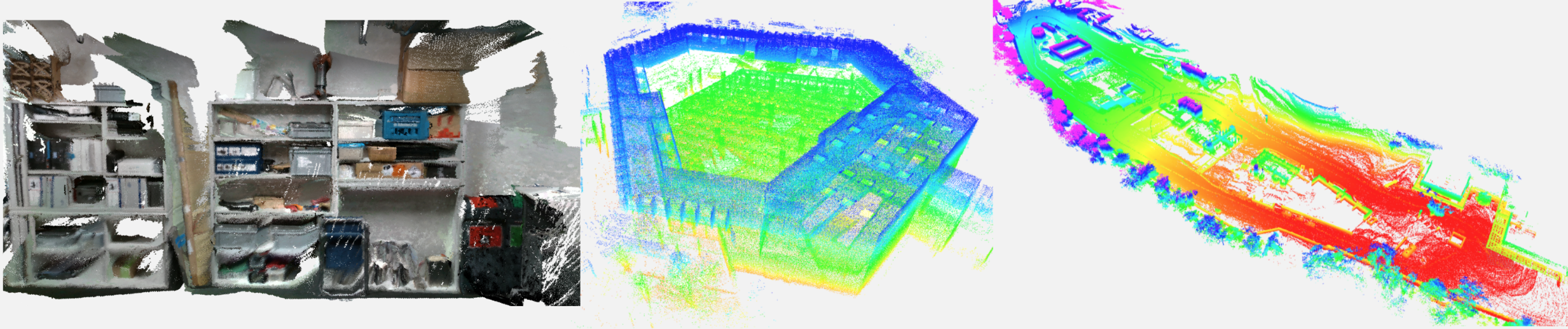
open3d_slam과 다른 SLAM 라이브러리의 주요 차이점은 open3d_slam이 단순하게 설계되었으며 교육 목적으로 사용된다는 것입니다. 실제로 open3d_slam은 기본 형태로 잘 확립된 알고리즘만 사용합니다. 이를 통해 신규 이민자들이 해당 분야에 더 쉽게 진입할 수 있기를 바랍니다. 포인트클라우드와 함께 작동하며 IMU와 같은 추가 입력이 필요하지 않습니다. Open3D_slam은 처음부터 지도를 만들거나 주어진 지도에서 지역화할 수 있습니다. 주어진 지도는 새로운 측정값으로 확장될 수도 있습니다.
우리는 잘 관리되고 성능이 뛰어난 3D 데이터 처리 라이브러리인 Open3D를 기반으로 구현합니다.
문서 및 예제 데이터세트는 open3d_slam 문서에서 찾을 수 있습니다.
ROS 프로젝트에서 Open3D를 쉽게 사용할 수 있도록 Open3D용 catkin 래퍼를 제공합니다. open3d_catkin/README.md의 문서를 참조하세요.
이 작업이 유용하다고 생각하거나 연구에 사용하는 경우 해당 작업을 인용해 보세요.
@inproceedings{jelavic2022open3d,
title={Open3D SLAM: Point Cloud Based Mapping and Localization for Education},
author={Jelavic, Edo and Nubert, Julian and Hutter, Marco},
booktitle={Robotic Perception and Mapping: Emerging Techniques, ICRA 2022 Workshop},
pages={24},
year={2022},
organization={ETH Zurich, Robotic Systems Lab}
}


