ReturnVisitRobot
1.0.0
보험 재방문에 사용되는 아웃바운드 콜 로봇입니다. 본 프로젝트에서는 핵심 텍스트 로봇 부분만 남깁니다. 핵심 기능 프로세스는 다음과 같습니다.
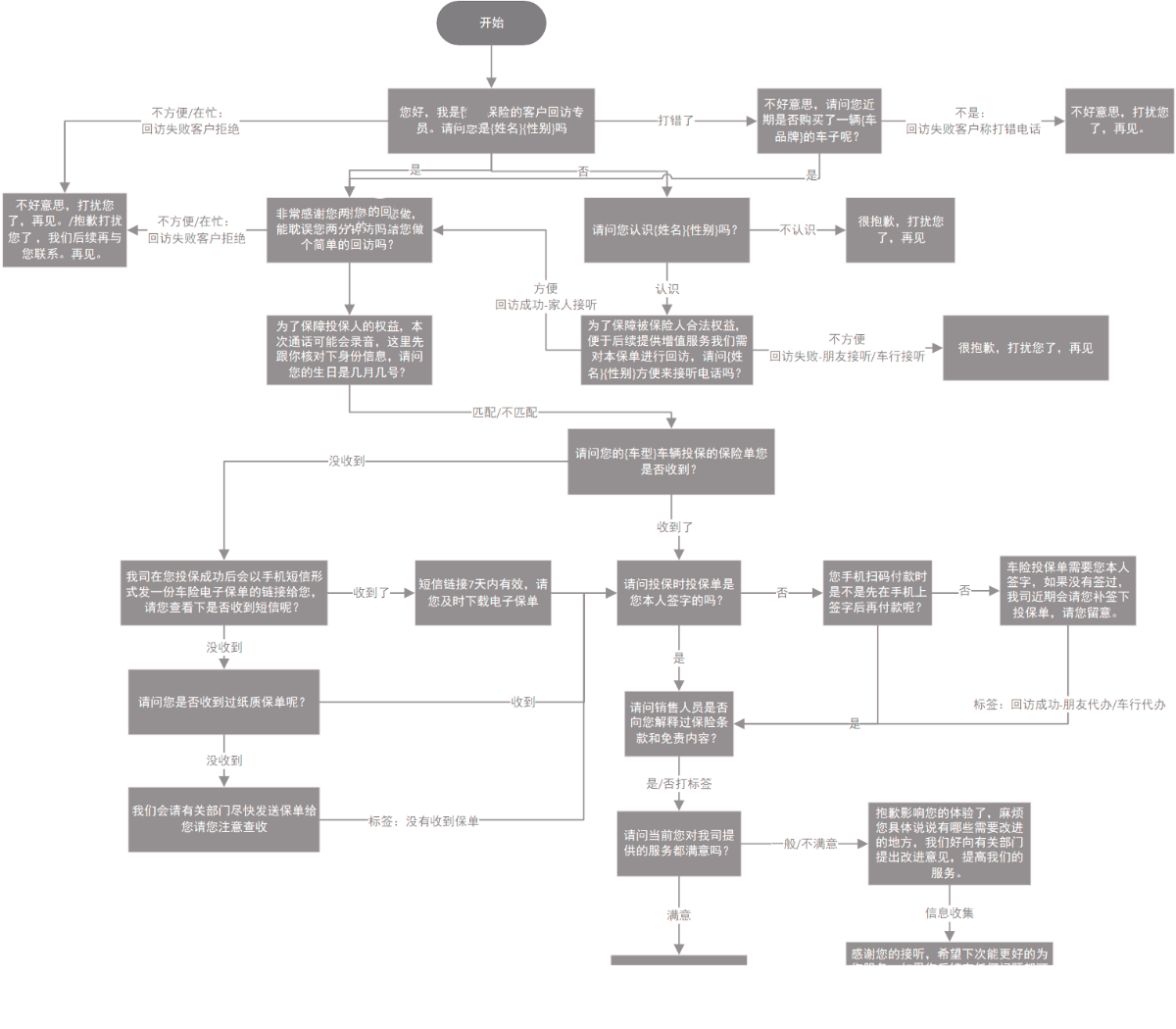
이 프로젝트는 rasa를 기반으로 유한 상태 기계를 기반으로 대화 응답 전략을 다시 작성하며 텍스트 로봇을 만들고 싶어하는 친구들에게 참고할만한 의미가 있을 것입니다.
구성: confg.yml 파일에서 파이프라인을 수정할 수 있습니다. 파이프라인의 구체적인 구성 방법은 Rasa 공식 웹사이트(https://rasa.com/docs/rasa/model-configuration)를 참조하세요.
다음은 두 가지 사용자 정의 구성 요소의 구성 예입니다.
기억 기반 대화 응답 전략
policies:
- name: policy.memoization.MemoizationPolicy
- name: TEDPolicy
max_history: 20
epochs: 15
batch_size: 50
- name: RulePolicy
core_fallback_threshold: 0.3
enable_fallback_prediction: True
core_fallback_action_name: "action_default_fallback"
또는 FSM(Finite State Machine) 기반
policies:
- name: policy.fsm_policy.FsmPolicy
- name: TEDPolicy
max_history: 20
epochs: 15
batch_size: 50
- name: RulePolicy
core_fallback_threshold: 0.3
enable_fallback_prediction: True
core_fallback_action_name: "action_default_fallback"
기차
python main.py train
달리다
#开启动作响应服务器,默认5055端口
python main.py run actions
#开启对话shell,如果使用pycharm注意勾选emulate terminal
python main.py shell
#第一句请输入内置意图:开始
Your input:开始
six~=1.16.0
rasa~=3.1.0
zlib~=1.2.12
tqdm~=4.64.0
pip install -r requirements.txt
rasa run -m xx.tar.gz(模型文件) -p 8787(端口号)


