neurodiffeq
v0.6.3
@article{chen2020neurodiffeq,
title={NeuroDiffEq: A Python package for solving differential equations with neural networks},
author={Chen, Feiyu and Sondak, David and Protopapas, Pavlos and Mattheakis, Marios and Liu, Shuheng and Agarwal, Devansh and Di Giovanni, Marco},
journal={Journal of Open Source Software},
volume={5},
number={46},
pages={1931},
year={2020}
}Neurodiffeq가 솔루션 번들을 지원하고 역 문제를 해결하는 데 사용할 수 있다는 것을 알고 계셨습니까? 여기를 참조하세요!
? 이미 Neurodiffeq에 대해 잘 알고 계시나요? ? FAQ로 이동하세요.
neurodiffeq 는 신경망을 사용하여 미분 방정식을 풀기 위한 패키지입니다. 미분방정식은 일부 함수와 그 파생물을 연관시키는 방정식입니다. 그들은 다양한 과학 및 공학 영역에서 나타납니다. 전통적으로 이러한 문제는 수치적 방법(예: 유한 차분, 유한 요소)을 통해 해결될 수 있습니다. 이러한 방법은 효과적이고 적절하지만 표현 가능성은 기능 표현에 따라 제한됩니다. 연속적이고 미분 가능한 미분 방정식의 해를 계산할 수 있다면 흥미로울 것입니다.
범용 함수 근사기로서 인공 신경망은 특정 초기/경계 조건을 사용하여 상미분 방정식(ODE) 및 편미분 방정식(PDE)을 풀 수 있는 잠재력을 갖는 것으로 나타났습니다. neurodiffeq 의 목적은 소프트웨어가 광범위한 사용자 정의 문제를 처리할 수 있을 만큼 유연해질 수 있도록 ANN을 사용하여 미분 방정식을 푸는 기존 기술을 구현하는 것입니다.
대부분의 표준 라이브러리와 마찬가지로 neurodiffeq PyPI에서 호스팅됩니다. 최신 안정 릴리스를 설치하려면,
pip install -U Neurodiffeq # '-U'는 최신 버전으로 업데이트함을 의미합니다.
또는 라이브러리를 수동으로 설치하여 새로운 기능에 조기에 액세스할 수 있습니다. 이는 라이브러리에 기여하려는 개발자에게 권장되는 방법입니다.
git clone https://github.com/NeuroDiffGym/neurodiffeq.gitcd Neurodiffeq && pip install -r 요구 사항 핍 설치 . # 라이브러리를 변경하려면 `pip install -e .`를 사용하세요. pytest 테스트/ # 테스트를 실행합니다. 선택 과목.
어떤 질문이라도 기꺼이 도와드리겠습니다. 그동안 FAQ를 확인해 보세요.
neurodiffeq 의 전체 튜토리얼과 문서를 보려면 공식 문서를 확인하세요.
문서 외에도 최근 슬라이드가 포함된 간단한 연습 데모 비디오를 만들었습니다.
Neurodiffeq에서 diff 가져오기 Neurodiffeq.solvers 가져오기 Solver1D, Solver2D에서 Neurodiffeq.condition 가져오기 IVP, DirichletBVP2D에서 Neurodiffeq.networks 가져오기 FCNN, SinActv
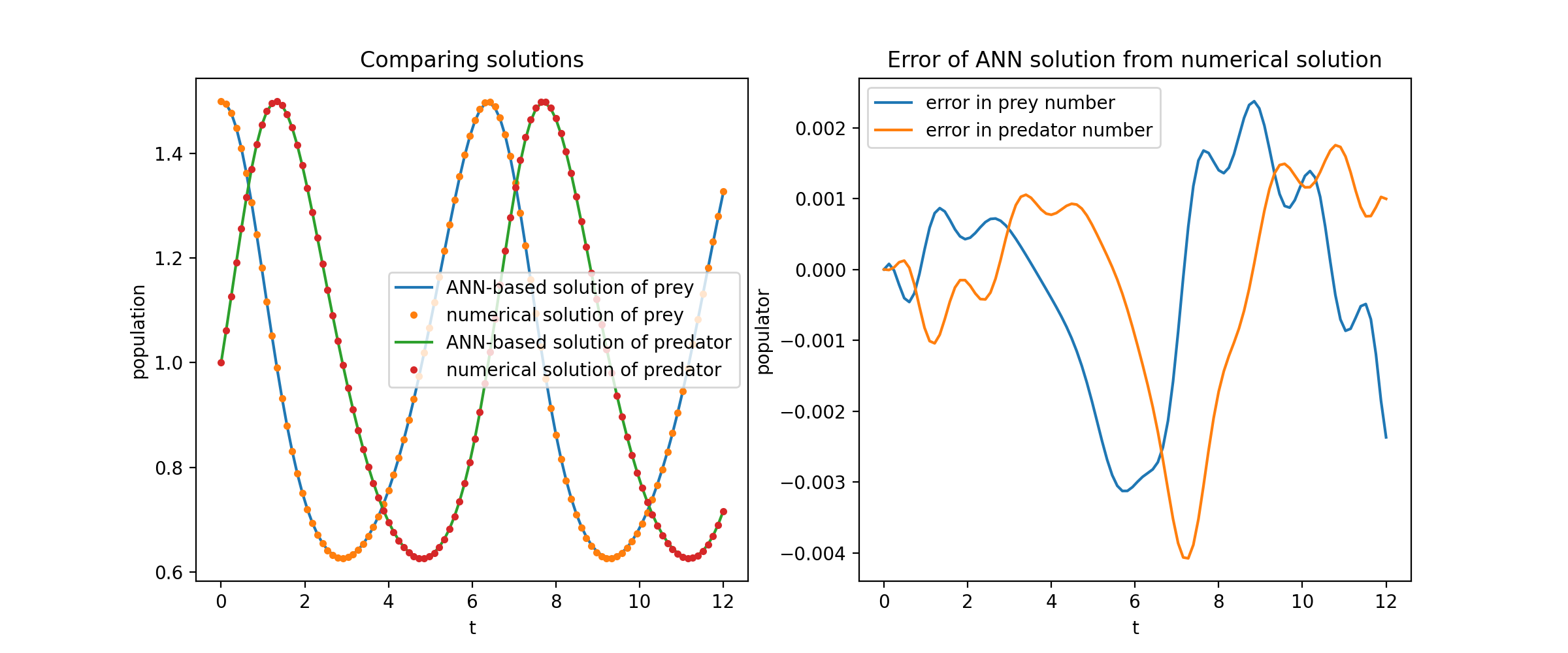
여기서는 Lotka-Volterra 방정식으로 알려진 두 ODE의 비선형 시스템을 풉니다. 두 개의 미지 함수( u 및 v )와 단일 독립 변수( t )가 있습니다.
def ode_system(u, v, t): return [diff(u,t)-(uu*v), diff(v,t)-(u*vv)]conditions = [IVP(t_0=0.0, u_0=1.5 ), IVP(t_0=0.0, u_0=1.0)]nets = [FCNN(actv=SinActv), FCNN(actv=SinActv)]solver = Solver1D(ode_system, 조건, t_min=0.1, t_max=12.0, nets=nets)solver.fit(max_epochs=3000)solution =solver.get_solution()
solution 호출 가능한 객체이므로 다음과 같이 numpy 배열이나 토치 텐서를 전달할 수 있습니다.
u, v = 솔루션(t, to_numpy=True) # t는 np.ndarray 또는 torch.Tensor일 수 있습니다.
분석 솔루션에 대해 u 와 v 플로팅하면 다음과 같은 결과가 나옵니다.
여기서는 직사각형의 Dirichlet 경계 조건을 사용하여 라플라스 방정식을 풉니다. 계산 분석 솔루션의 단순성을 위해 라플라스 방정식을 선택했습니다. 실제로 솔버를 충분히 잘 조정한다면 비선형, 카오스 PDE를 시도할 수 있습니다 .
2차원 PDE 시스템을 푸는 것은 경계값 문제에 대한 두 개의 변수 x 와 y 또는 초기 경계값 문제에 대한 x 와 t 모두 지원된다는 점을 제외하면 ODE를 푸는 것과 매우 유사합니다.
def pde_system(u, x, y):return [diff(u, x, order=2) + diff(u, y, order=2)]conditions = [DirichletBVP2D(x_min=0, x_min_val=lambda y: 토치. sin(np.pi*y),x_max=1, x_max_val=lambda y: 0, y_min=0, y_min_val=람다 x: 0, y_max=1, y_max_val=람다 x: 0,
)
]nets = [FCNN(n_input_units=2, n_output_units=1, Hidden_units=(512,))]solver = Solver2D(pde_system, 조건, xy_min=(0, 0), xy_max=(1, 1), nets=nets) solver.fit(max_epochs=2000)솔루션 =solver.get_solution() 2D PDE에 대한 solution 의 서명은 ODE의 솔루션 서명과 약간 다릅니다. 다시 말하지만, numpy 배열이나 토치 텐서를 사용합니다.
u = 해(x, y, to_numpy=True)
[0,1] × [0,1] 에서 u를 평가하면 다음 플롯이 생성됩니다.
| ANN 기반 솔루션 | PDE의 잔차 |
|---|---|
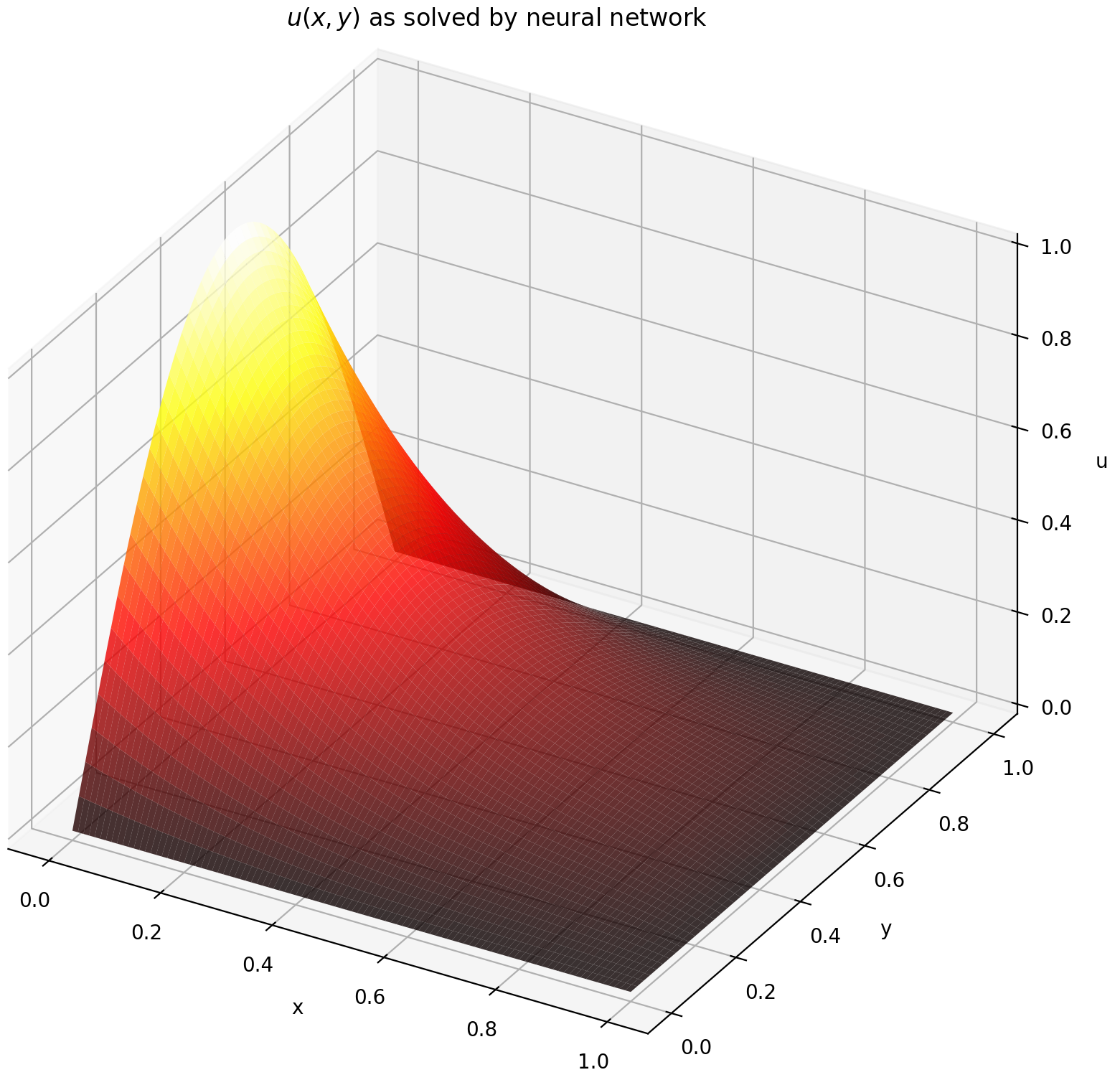 | 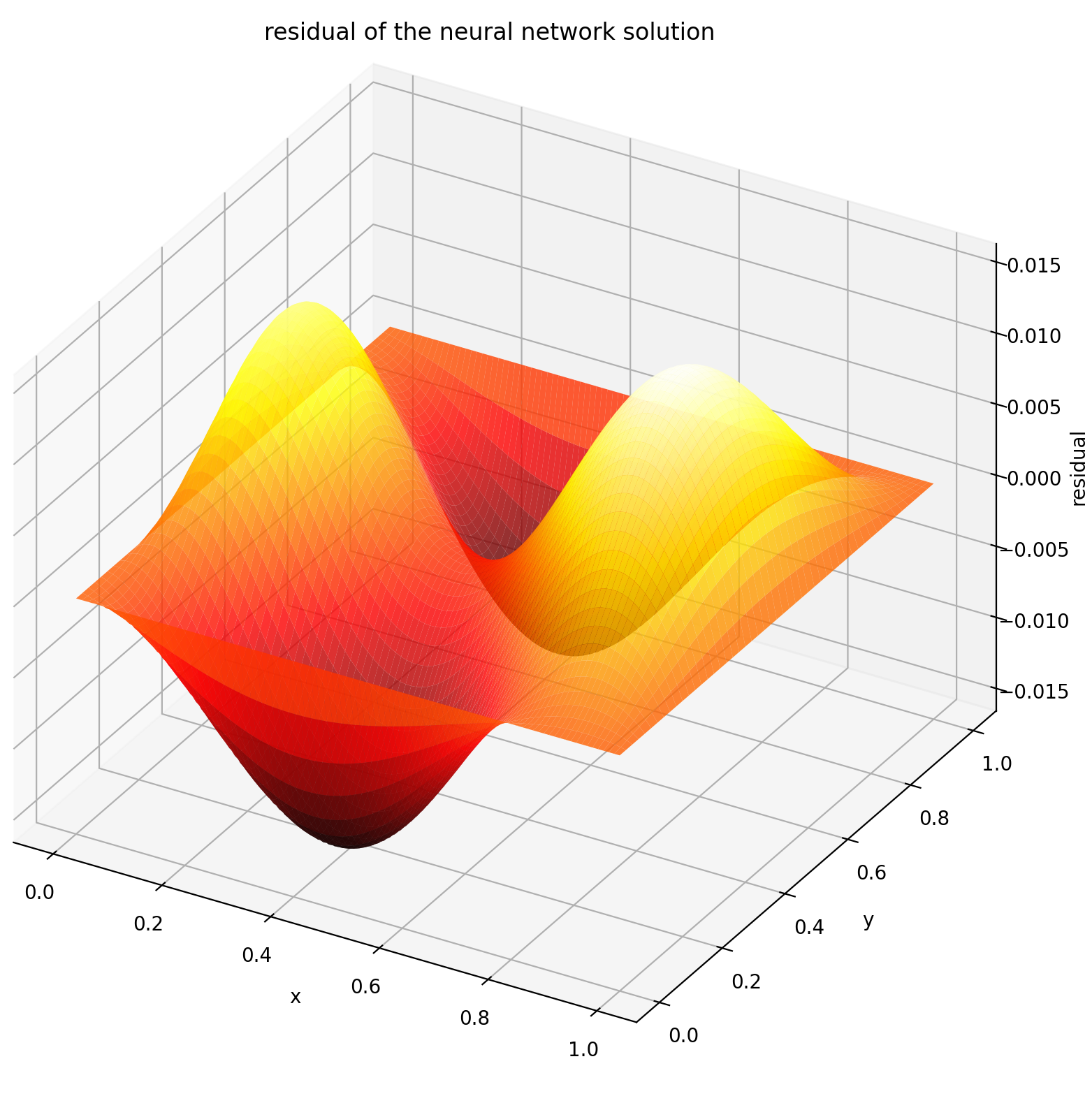 |
모니터는 PDE/ODE 솔루션은 물론 훈련 중 손실 기록 및 사용자 정의 측정항목을 시각화하기 위한 도구입니다. Jupyter Notebooks 사용자는 %matplotlib notebook 매직을 실행해야 합니다. Jupyter Lab 사용자의 경우 %matplotlib widget 사용해 보세요.
Neurodiffeq.monitors import Monitor1D...monitor = Monitor1D(t_min=0.0, t_max=12.0, check_every=100)solver.fit(..., callbacks=[monitor.to_callback()])
플롯은 마지막 epoch 뿐만 아니라 100epoch마다 업데이트되어 두 개의 플롯을 표시합니다. 하나는 간격 [0,12] 의 솔루션 시각화용이고 다른 하나는 손실 기록(훈련 및 검증)용입니다.
편의를 위해 우리는 숨겨진 유닛과 활성화 기능을 사용자 정의할 수 있는 완전 연결 신경망인 FCNN 구현했습니다.
Neurodiffeq.networks import FCNN# 기본값: n_input_units=1, n_output_units=1, Hidden_units=[32, 32], 활성화=torch.nn.Tanhnet1 = FCNN(n_input_units=..., n_output_units=..., Hidden_units=[ ..., ..., ...], 활성화=...) ...nets = [net1, net2, ...]
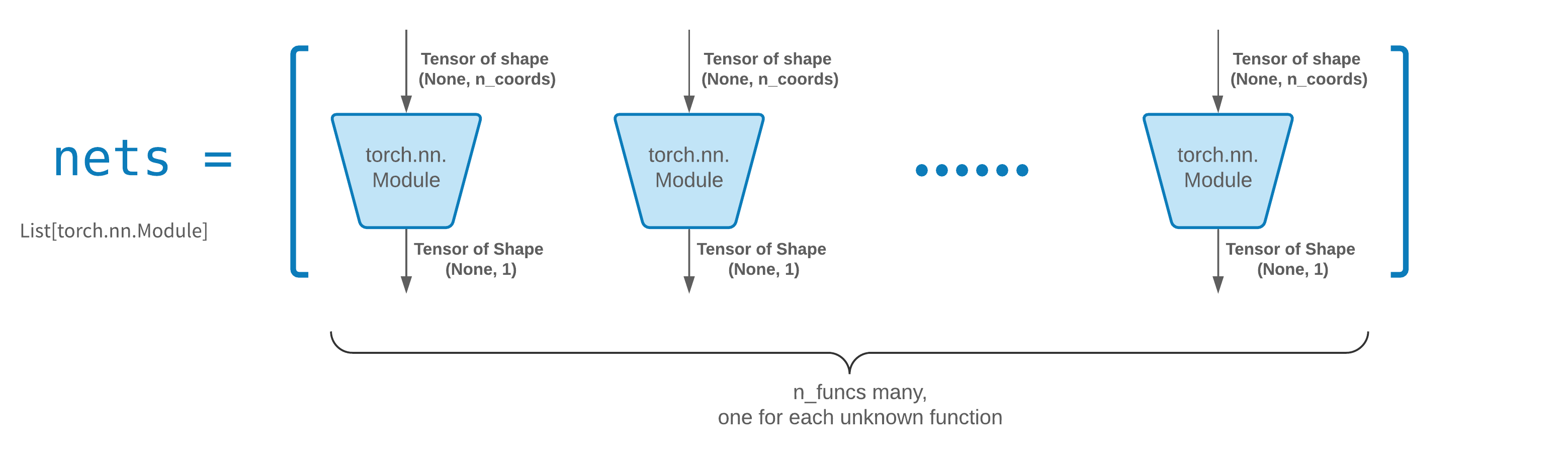
FCNN 은 일반적으로 좋은 출발점입니다. 고급 사용자의 경우 솔버는 모든 사용자 정의 torch.nn.Module 과 호환됩니다. 유일한 제약은 다음과 같습니다:
모듈은 (None, n_coords) 모양의 텐서를 취하고 (None, 1) 모양의 텐서를 출력합니다.
solver = Solver(..., nets=nets) 에 전달하려면 nets 에 총 n_funcs 모듈이 있어야 합니다.
실제로, neurodiffeq 에는 위의 규칙을 따르지 않는 Single_net 기능이 있으므로 여기서는 다루지 않습니다.
자신만의 네트워크(모듈) 아키텍처 구축에 대한 PyTorch 튜토리얼을 읽어보세요.
전이 학습은 old_solver.nets (토치 모듈 목록)를 디스크에 직렬화한 다음 이를 로드하고 새 솔버에 전달하여 쉽게 수행됩니다.
old_solver.fit(max_epochs=...)# ... `old_solver.nets`를 디스크에 덤프# ... 디스크에서 네트워크를 로드하고 `loaded_nets`에 저장합니다. Variablenew_solver = Solver(..., nets=loaded_nets )new_solver.fit(max_epochs=...)
현재 우리는 솔버의 네트워크 및 기타 내부 변수를 저장/로드하는 래퍼 함수를 작업하고 있습니다. 그동안 네트워크 저장 및 로드에 대한 PyTorch 튜토리얼을 읽어보세요.
Neurodiffeq에서 네트워크는 도메인의 일련의 점에서 평가된 손실(ODE/PDE 잔차)을 최소화하여 훈련됩니다. 포인트는 매번 무작위로 리샘플링됩니다. 샘플링된 포인트의 수, 분포 및 경계 도메인을 제어하려면 자체 교육/검증 generator 를 지정할 수 있습니다.
Neurodiffeq.generators import Generator1D# 기본값 t_min=0.0, t_max=1.0, method='uniform', Noise_std=Noneg1 = Generator1D(size=..., t_min=..., t_max=..., method=.. ., Noise_std=...)g2 = Generator1D(크기=..., t_min=..., t_max=..., 방법=..., Noise_std=...)solver = Solver1D(..., train_generator=g1, valid_generator=g2)
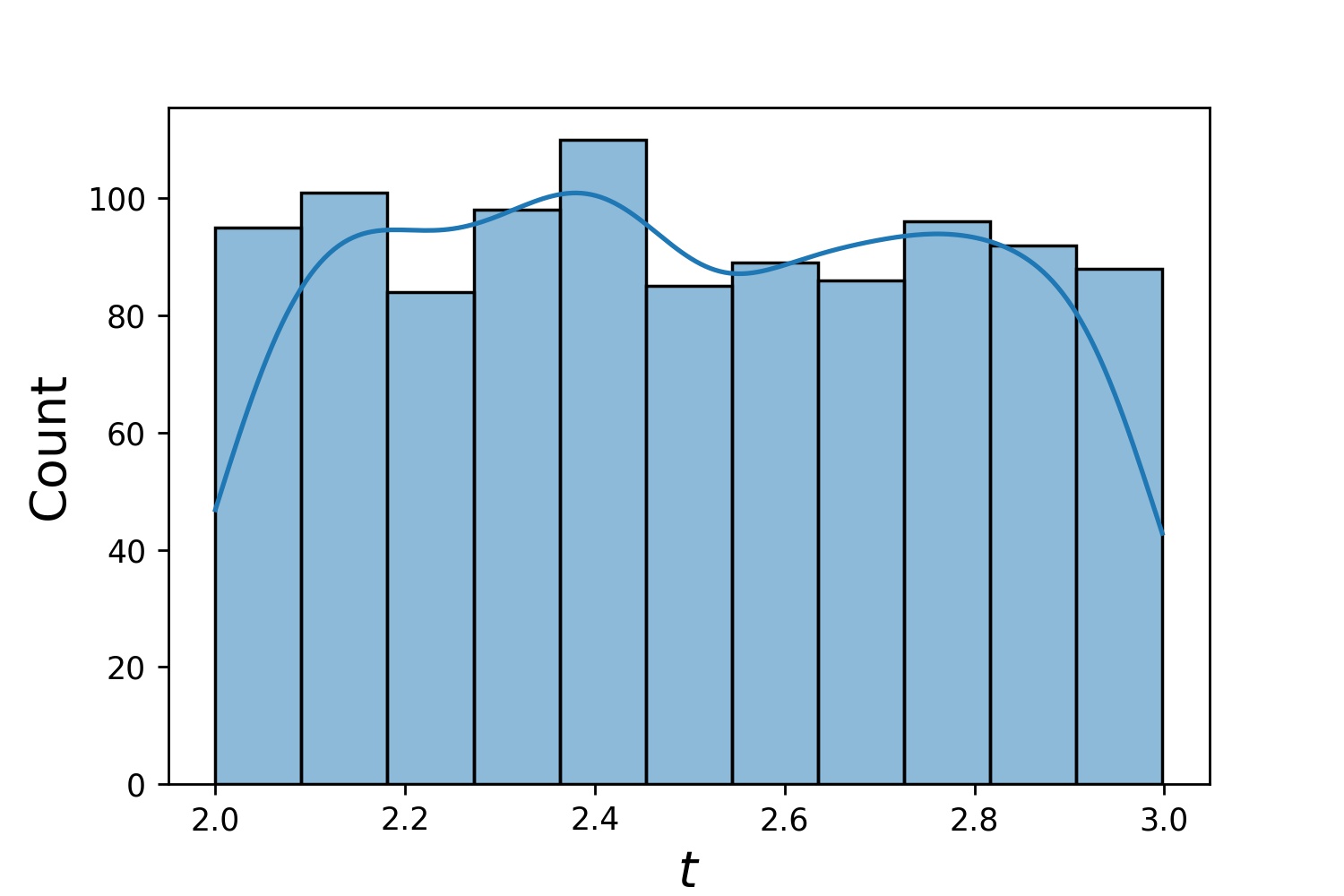
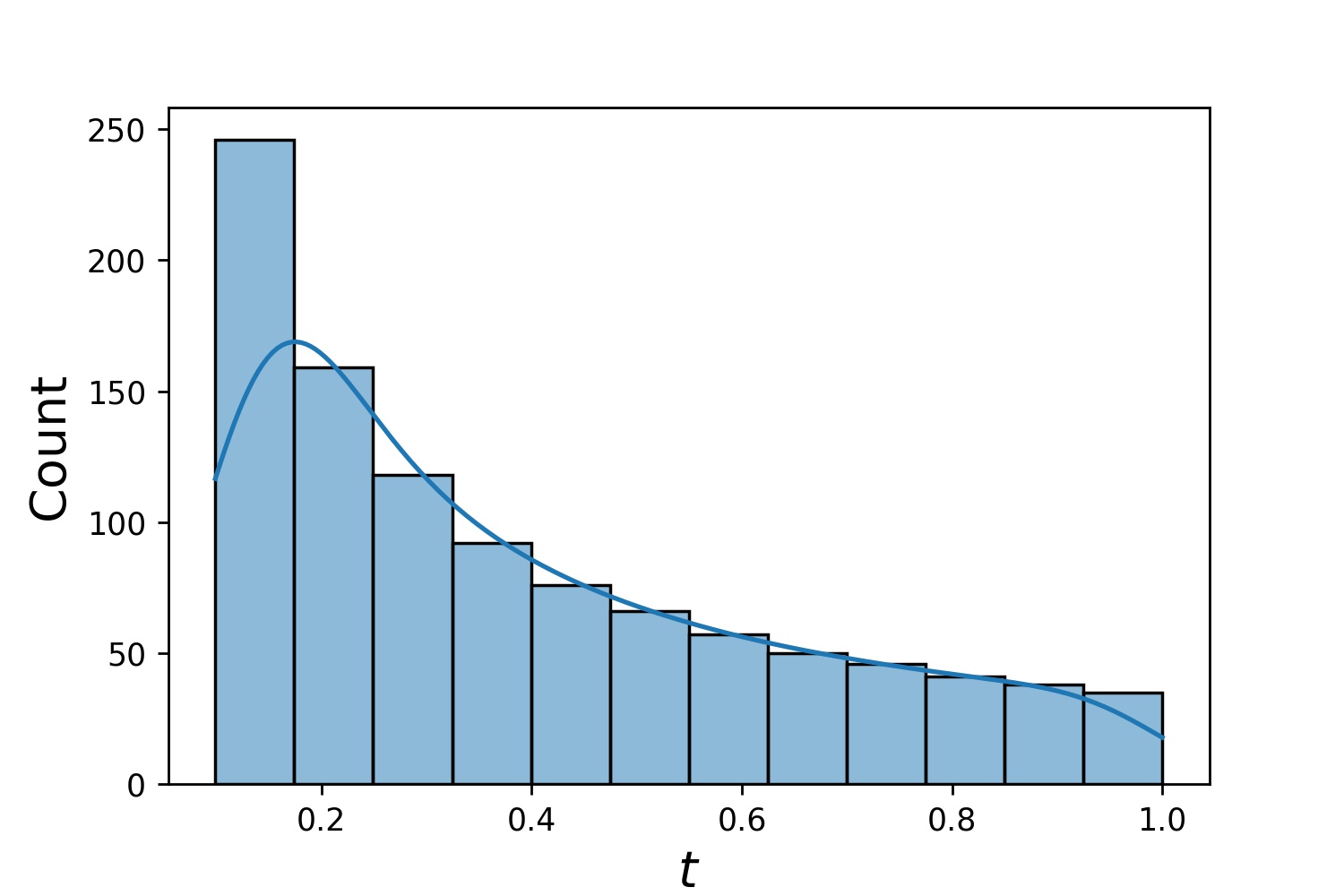
다음은 Generator1D 의 일부 샘플 분포입니다.
Generator1D(8192, 0.0, 1.0, method='uniform') | Generator1D(8192, -1.0, 0.0, method='log-spaced-noisy', noise_std=1e-3) |
|---|---|
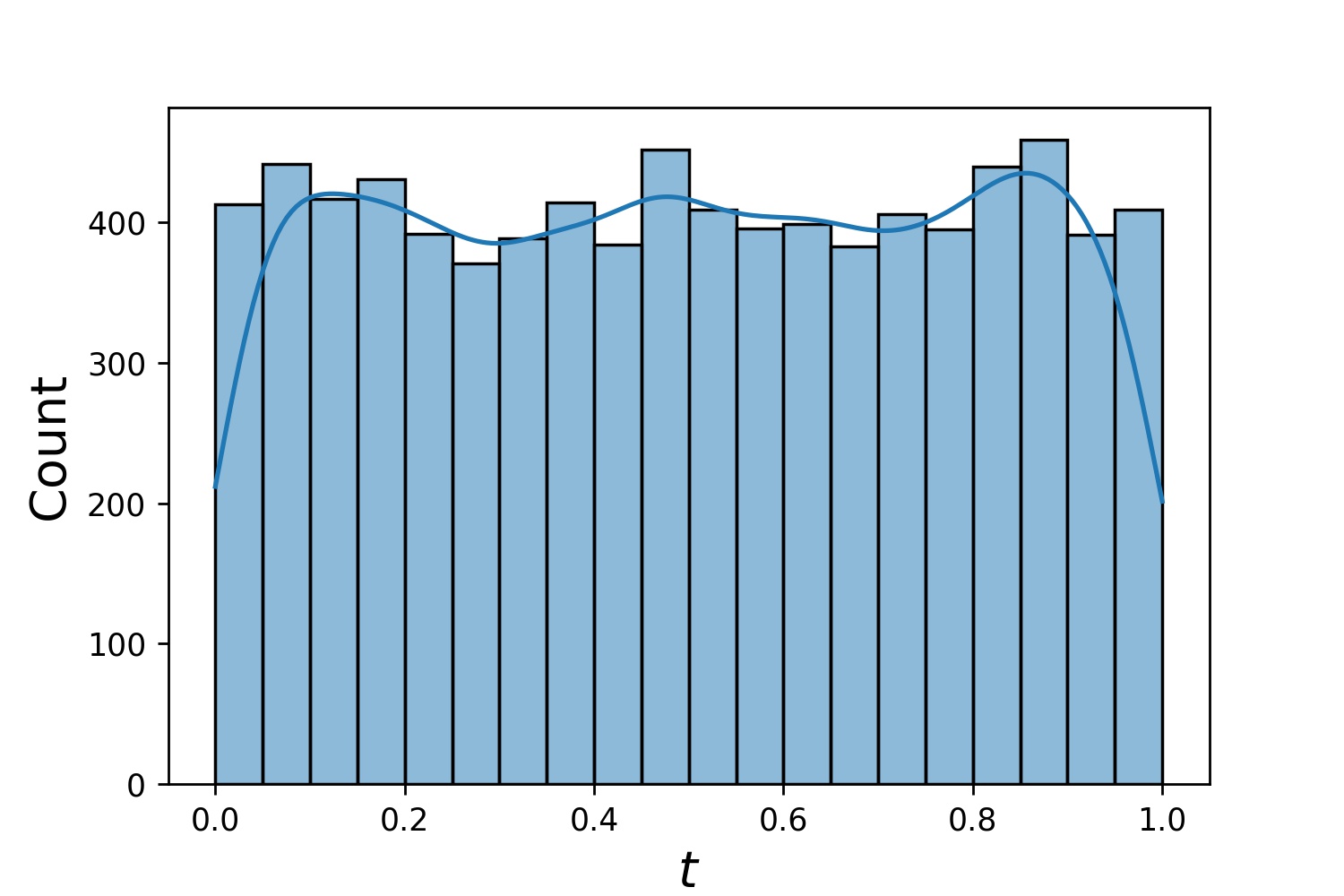 | 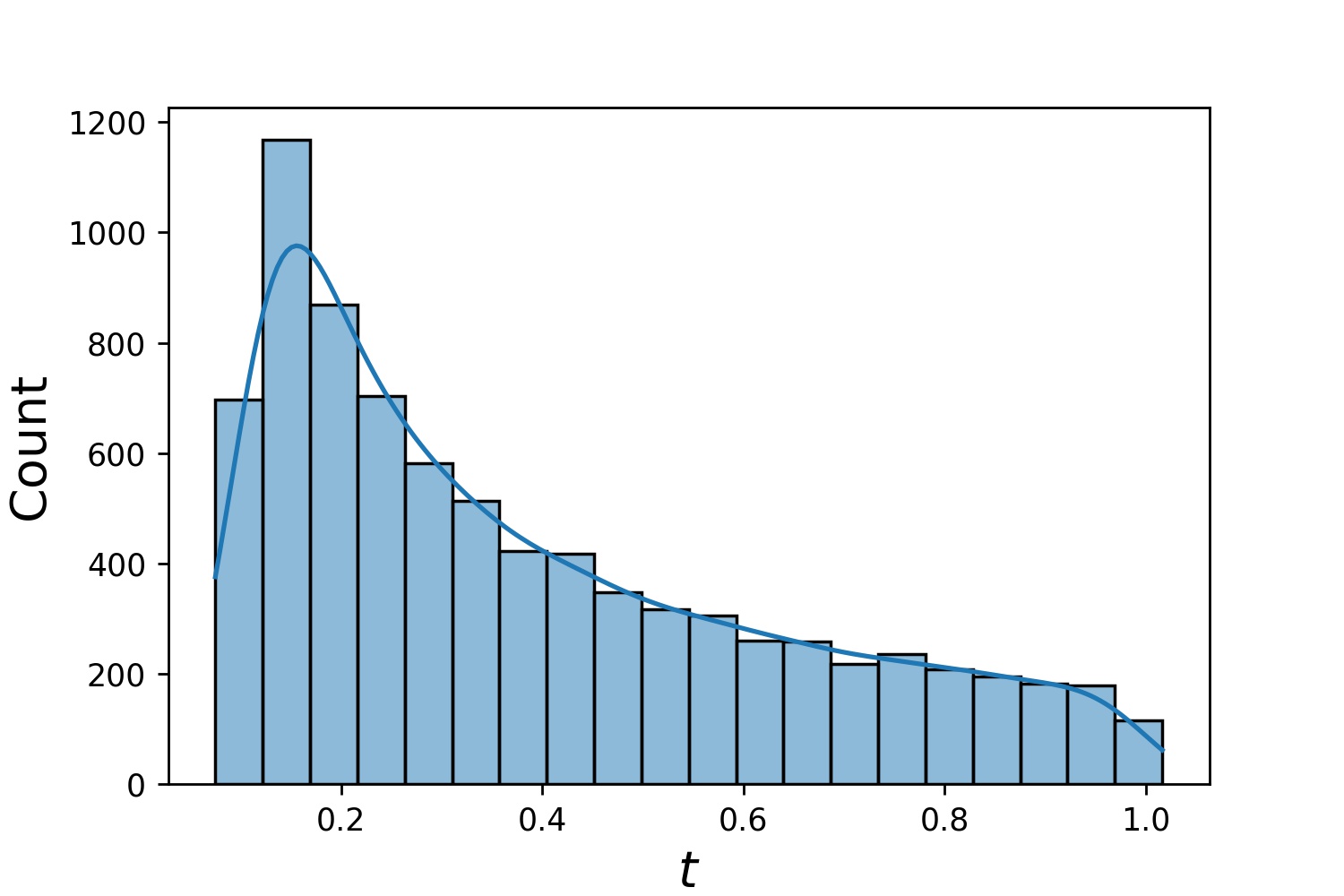 |
train_generator 와 valid_generator 모두 지정하면 Solver1D(...) 에서 t_min 및 t_max 생략할 수 있습니다. 실제로 t_min , t_max , train_generator , valid_generator 함께 전달하더라도 t_min 및 t_max 여전히 무시됩니다.
생성기의 또 다른 좋은 기능은 예를 들어 생성기를 연결할 수 있다는 것입니다.
g1 = Generator2D((16, 16), xy_min=(0, 0), xy_max=(1, 1))g2 = Generator2D((16, 16), xy_min=(1, 1), xy_max=(2, 2 ))g = g1 + g2
여기서 g g1 과 g2 의 결합된 샘플을 출력하는 생성기입니다.
g1 | g2 | g1 + g2 |
|---|---|---|
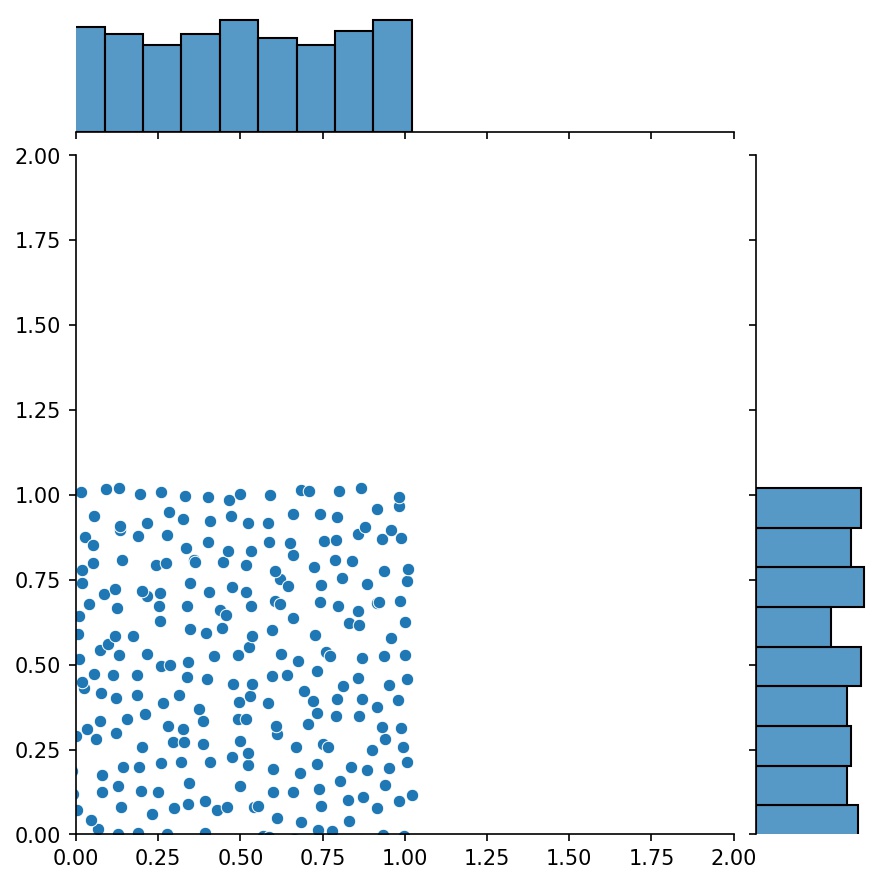 |  | 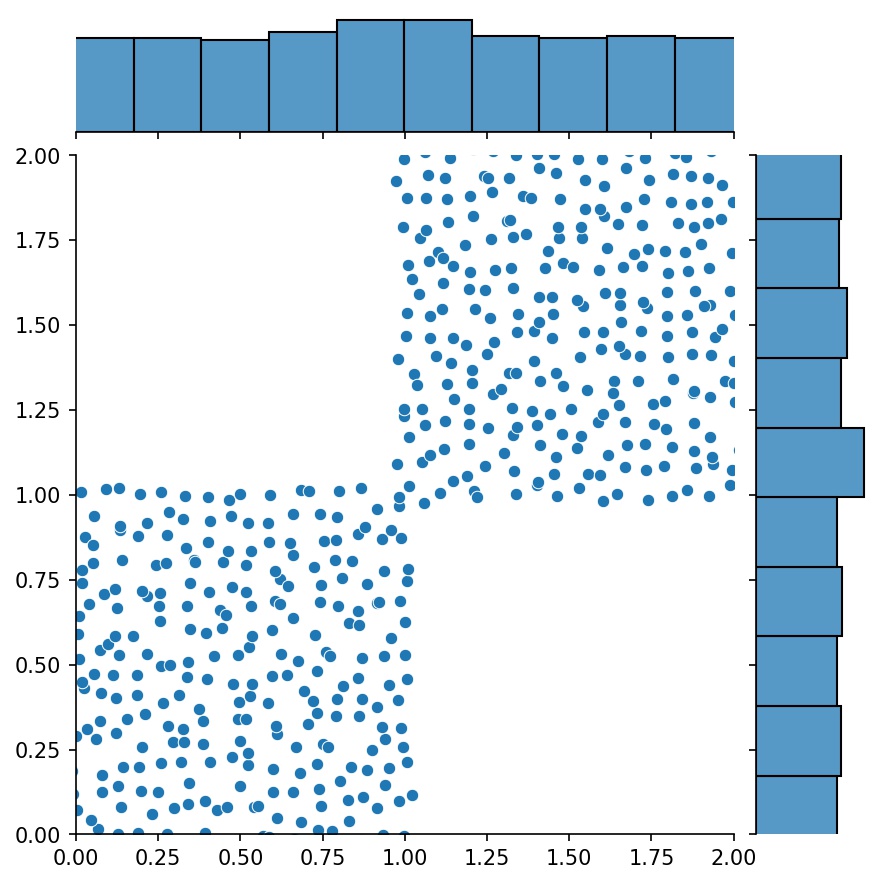 |
더 높은 차원의 샘플링 포인트에는 Generator2D , Generator3D 등을 사용할 수 있습니다. 하지만 또 다른 방법도 있어요
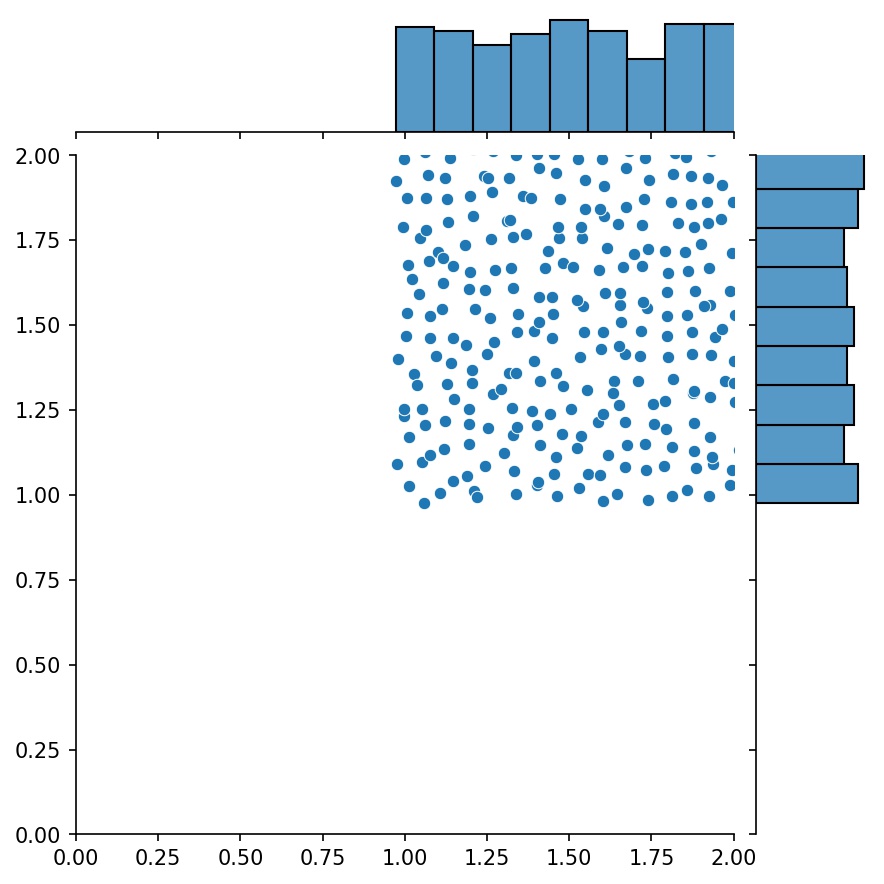
g1 = Generator1D(1024, 2.0, 3.0, 방법='균일')g2 = Generator1D(1024, 0.1, 1.0, 방법='log-spaced-noisy', Noise_std=0.001)g = g1 * g2
여기서 g 매번 2차원 직사각형 (2,3) × (0.1,1) 에 1024개의 포인트를 생성하는 생성기가 됩니다. 이들의 x 좌표는 uniform 전략을 사용하여 (2,3) 에서 추출되고 y 좌표는 log-spaced-noisy 전략을 사용하여 (0.1,1) 에서 추출됩니다.
g1 | g2 | g1 * g2 |
|---|---|---|
 |  | 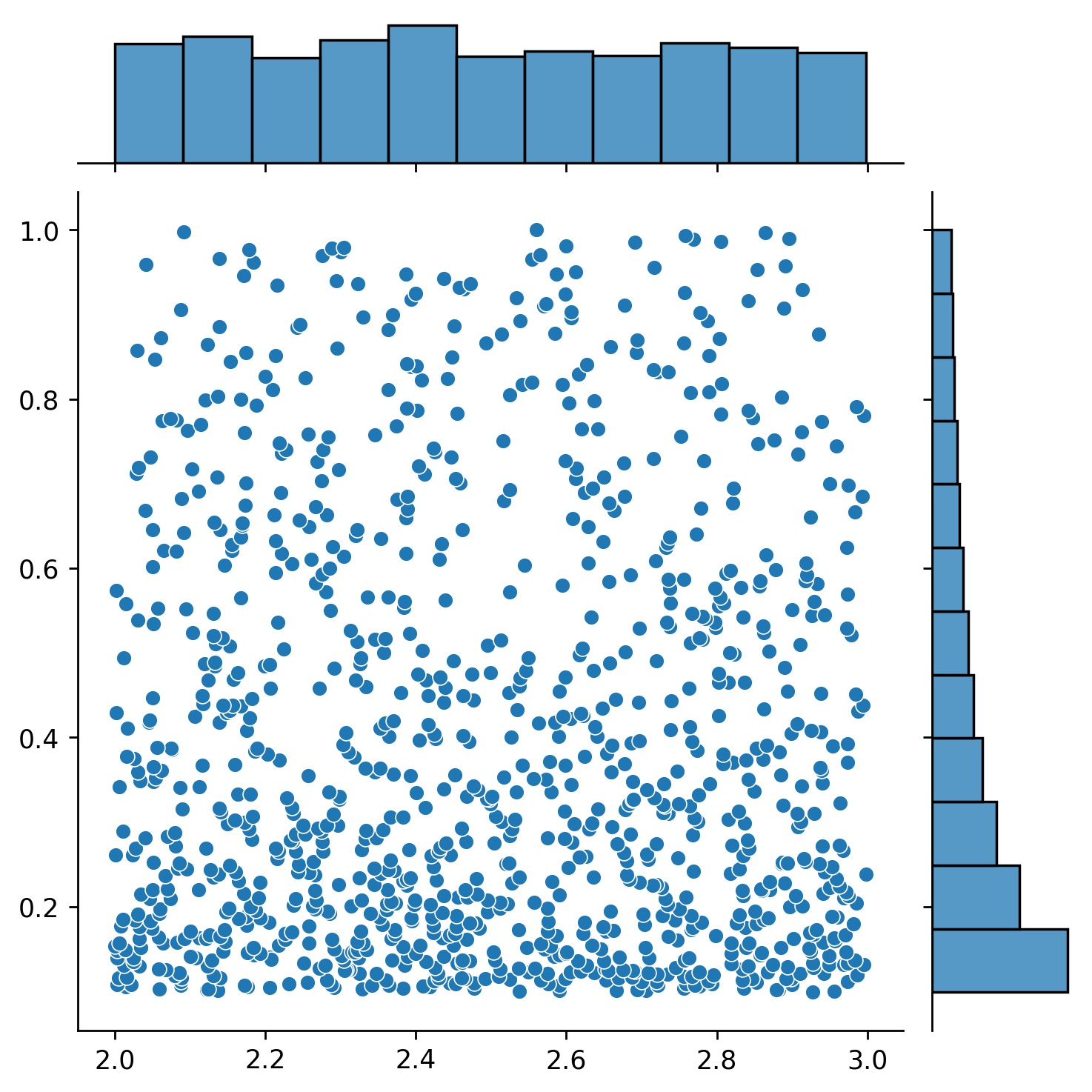 |
때로는 방정식 묶음을 한 번에 푸는 것이 흥미로울 때도 있습니다. 예를 들어, 초기 조건 u(0) = U0 에서 du/dt + λu = 0 형식의 미분 방정식을 풀고 싶을 수 있습니다. 신경망에 대한 입력으로 처리하여 모든 λ 및 U0 에 대해 한 번에 이 문제를 해결하려고 할 수 있습니다.
이러한 응용 분야 중 하나는 반응 속도를 알 수 없는 화학 반응에 대한 것입니다. 다양한 반응 속도는 다양한 솔루션에 해당하며 단 하나의 솔루션만이 관찰된 데이터 포인트와 일치합니다. 먼저 솔루션 묶음을 해결한 다음 최상의 반응 속도(방정식 매개변수라고도 함)를 결정하는 데 관심이 있을 수 있습니다. 두 번째 단계는 역 문제 로 알려져 있습니다.
다음은 neurodiffeq 사용하여 이를 수행하는 방법에 대한 예입니다.
방정식 du/dt + λu = 0 과 초기 조건 u(0) = U0 이 있다고 가정해 보겠습니다. 여기서 λ 와 U0 은 알 수 없는 상수입니다. 우리는 또한 일련의 관찰 t_obs 및 u_obs 가지고 있습니다. 먼저 솔루션 번들을 얻는 데 필요한 BundleSolver 및 BundleIVP 가져옵니다.
Neurodiffeq.conditions import BundleIVPfrom Neurodiffeq.solvers import BundleSolver1Dimport matplotlib.pyplot as pltimport numpy as npimport torchfrom Neurodiffeq import diff
입력 t 의 도메인과 매개변수 λ 및 U0 의 도메인을 결정합니다. 또한 매개변수의 순서를 결정해야 합니다. 즉, 어느 것이 첫 번째 매개변수이고 어느 것이 두 번째 매개변수여야 하는지입니다. 이 데모에서는 λ 첫 번째 매개변수(인덱스 0)로 선택하고 U0 두 번째 매개변수(인덱스 1)로 선택합니다. 매개변수의 인덱스를 추적하는 것이 매우 중요합니다.
T_MIN, T_MAX = 0, 1LAMBDA_MIN, LAMBDA_MAX = 3, 5 # 첫 번째 매개변수, 인덱스 = 0U0_MIN, U0_MAX = 0.2, 0.6 # 두 번째 매개변수, 인덱스 = 1
그런 다음 IVP 및 Solver1D 대신 BundleIVP 및 BundleSolver1D 사용하는 것을 제외하고 평소와 같이 conditions 과 solver 정의합니다. 이 둘의 인터페이스는 IVP 및 Solver1D 와 매우 유사합니다. API 참조에서 자세한 내용을 확인할 수 있습니다.
# 방정식 매개변수는 입력(보통 시간 및 공간 좌표) 뒤에 옵니다. diff_eq = 람다 u, t, lmd: [diff(u, t) + lmd * u]# BundleIVP에서 키워드 인수 이름은 "u_0"이어야 합니다. 다른 것을 사용하면(예: `y0`, `u0` 등) 작동하지 않습니다.conditions = [BundleIVP(t_0=0, u_0=None, Bundle_param_lookup={'u_0': 1}) # u_0에는 인덱스 1]solver = BundleSolver1D(ode_system=diff_eq,conditions=conditions,t_min=T_MIN, t_max=T_MAX, theta_min=[LAMBDA_MIN, U0_MIN], # λ의 인덱스는 0이고, u_0의 인덱스는 1입니다.theta_max=[LAMBDA_MAX, U0_MAX], # λ의 인덱스는 0입니다. u_0의 인덱스는 1eq_param_index=(0,)입니다. 인덱스가 0n_batches_valid=1인 방정식 매개변수,
) λ 는 방정식의 매개변수 이고 U0 초기 조건의 매개변수이므로 diff_eq 에 λ , 조건에 U0 포함해야 합니다. 매개변수가 방정식과 조건 모두에 존재하는 경우 두 위치 모두에 포함되어야 합니다. BundleSovler1D 에 전달된 conditions 의 모든 요소는 매개변수가 없더라도 Bundle* 조건이어야 합니다.
이제 평소처럼 훈련하고 솔루션을 얻을 수 있습니다.
solver.fit(max_epochs=1000)솔루션 =solver.get_solution(best=True)
이 솔루션에는 t , λ 및 U0 의 세 가지 입력이 필요합니다. 모든 입력은 동일한 형태를 가져야 합니다. 예를 들어, λ=4 및 U0=0.4 고정하고 t ∈ [0,1] 에 대해 해 u 플로팅하는 데 관심이 있는 경우 다음을 수행할 수 있습니다.
t = np.linspace(0, 1)lmd = 4 * np.ones_like(t)u0 = 0.4 * np.ones_like(t)u = 솔루션(t, lmd, u0, to_numpy=True) matplotlib.pyplot을 pltplt로 가져오기 .plot(티, 유)
번들 solution 있으면 관찰된 데이터 포인트 (t_i, u_i) 와 가장 밀접하게 일치하는 매개변수 세트 (λ, U0) 를 찾을 수 있습니다. 이는 간단한 경사하강법을 사용하여 달성됩니다. 다음 장난감 예에서는 u(0.2) = 0.273 , u(0.5)=0.129 및 u(0.8) = 0.0609 세 개의 데이터 포인트만 있다고 가정합니다. 다음은 고전적인 PyTorch 작업 흐름입니다.
# 관찰된 데이터 포인트t_obs = torch.tensor([0.2, 0.5, 0.8]).reshape(-1, 1)u_obs = torch.tensor([0.273, 0.129, 0.0609]).reshape(-1, 1)# 무작위 초기화 λ와 U0; 그래디언트를 추적하세요lmd_tensor = torch.rand(1) * (LAMBDA_MAX - LAMBDA_MIN) + LAMBDA_MINu0_tensor = torch.rand(1) * (U0_MAX - U0_MIN) + U0_MINadam = torch.optim.Adam([lmd_tensor.requires_grad_(True), u0_tensor.requires_grad_(참)], lr=1e-2)# _ in range(10000)에 대해 10000 epoch 동안 경사하강법을 실행합니다:output = Solution(t_obs, lmd_tensor * torch.ones_like(t_obs), u0_tensor * torch.ones_like(t_obs))loss = ((output - u_obs) ** 2).mean()loss.backward()adam.step()adam.zero_grad()
print(f"λ = {lmd_tensor.item()}, U0={u0_tensor.item()}, 손실 = {loss.item()}") 단순한. Neurodiffeq를 가져올 때 라이브러리는 컴퓨터에서 CUDA를 사용할 수 있는지 자동으로 감지합니다. 라이브러리는 PyTorch를 기반으로 하기 때문에 호환되는 GPU 장치가 발견되면 기본 텐서 유형을 torch.cuda.DoubleTensor 로 설정합니다.
사용자 정의 네트워크 및 전이 학습 섹션을 참조하세요.
표준 PyTorch 방식입니다.
사용자 정의 네트워크: nets = [FCNN(), FCN(), ...] 에 설명된 대로 네트워크를 구축하십시오.
사용자 정의 최적화 프로그램을 인스턴스화하고 이러한 네트워크의 모든 매개변수를 전달합니다.
parameters = [p for net in nets for p in net.parameters()] # 모든 네트워크의 매개변수 목록MY_LEARNING_RATE = 5e-3optimizer = torch.optim.Adam(parameters, lr=MY_LEARNING_RATE, ...)
nets 와 optimizer 모두 솔버에 전달합니다: solver = Solver1D(..., nets=nets, optimizer=optimizer)
기존 수치법(FEM, FVM 등)과 달리 NN 기반 솔루션에는 약간의 하이퍼튜닝이 필요합니다. 라이브러리는 하이퍼파라미터의 모든 조합을 시도할 수 있는 최고의 유연성을 제공합니다.
다른 네트워크 아키텍처를 사용하려면 사용자 정의 torch.nn.Module 을 전달할 수 있습니다.
다른 옵티마이저를 사용하려면 자체 옵티마이저를 solver = Solver(..., optimizer=my_optim) 에 전달할 수 있습니다.
다른 샘플링 분포를 사용하려면 내장 생성기를 사용하거나 처음부터 자체 생성기를 작성할 수 있습니다.
다른 샘플링 크기를 사용하려면 생성기를 조정하거나 solver = Solver(..., n_batches_train) 변경할 수 있습니다.
훈련 중에 하이퍼파라미터를 동적으로 변경하려면 콜백 기능을 확인하세요.
ReLU 활성화에 사용하지 마세요. 2차 도함수는 동일하게 0이기 때문입니다.
PDE/ODE를 무차원 형식으로 다시 조정하고 모든 범위를 [0,1] 로 만드는 것이 좋습니다. [0,1000000] 과 같은 도메인으로 작업하는 것은 a) PyTorch가 모듈 가중치를 상대적으로 작게 초기화하고 b) 대부분의 활성화 함수(예: Sigmoid, Tanh, Swish)가 0에 가까운 비선형이기 때문에 실패하기 쉽습니다.
PDE/ODE가 너무 복잡하다면 커리큘럼 학습을 시도해 보세요. 더 작은 도메인에서 네트워크 교육을 시작한 다음 전체 도메인이 포함될 때까지 점차적으로 확장하십시오.
누구나 이 프로젝트에 기여할 수 있습니다.
이 저장소에 기여할 때 우리는 다음 프로세스를 고려합니다.
이슈를 열어 계획 중인 변경 사항에 대해 논의하세요.
기여 지침을 살펴보세요.
포크된 저장소를 변경하고 인터페이스가 변경되면 README.md를 업데이트하세요.
풀 요청을 엽니다.


