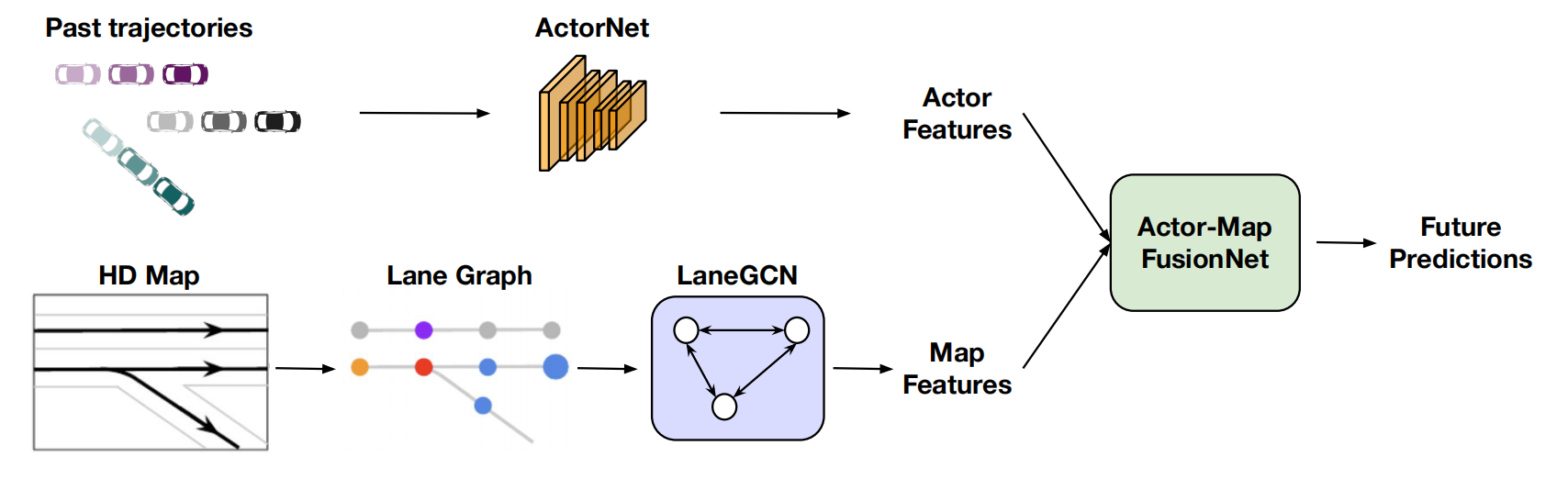
LaneGCN
1.0.0
주의
많은 데모 파일을 보유하고 있는 Amazon AWS S3 버킷 argoai-argoverse 손상되었습니다. 파일이 손상되었을 수 있습니다.
이 S3 버킷을 참조하는 파일이 수정되었으며 이 버킷의 모든 검색은 주석 처리되었습니다. 주의해서 진행하시기 바랍니다.
종이 | 슬라이드 | 프로젝트 페이지 | ECCV 2020 구두 영상
Ming Liang, Bin Yang, Rui Hu, Yun Chen, Renjie Liao, Song Feng, Raquel Urtasun
Argoverse 움직임 예측 대회 1위
코드를 실행하려면 다음 패키지를 설치해야 합니다.
conda create --name lanegcn python=3.7
conda activate lanegcn
conda install pytorch==1.5.1 torchvision cudatoolkit=10.2 -c pytorch # pytorch=1.5.1 when the code is release
# install argoverse api
pip install git+https://github.com/argoai/argoverse-api.git
# install others dependancy
pip install scikit-image IPython tqdm ipdbmpi4py 설치합니다. Horovod는 다중 GPU 교육에 nn.DataParallel 보다 더 효율적이고 nn.DistributedDataParallel 보다 사용하기 쉽습니다. horovod를 설치하기 전에 openmpi가 설치되어 있는지 확인하십시오( sudo apt-get install -y openmpi-bin ). pip install mpi4py
# install horovod with GPU support, this may take a while
HOROVOD_GPU_OPERATIONS=NCCL pip install horovod==0.19.4
# if you have only SINGLE GPU, install for code-compatibility
pip install horovodHorovod와 관련하여 문제가 있는 경우 Horovod github을 참조하세요.
몇 시간 동안 실행하는 대신 스크립트를 확인하고 처리된 데이터를 다운로드할 수 있습니다.
bash get_data.sh # single node with 4 gpus
horovodrun -np 4 -H localhost:4 python /path/to/train.py -m lanegcn
# 2 nodes, each with 4 gpus
horovodrun -np 8 -H serverA:4,serverB:4 python /path/to/train.py -m lanegcnHorovod를 사용하여 4개의 GPUS(RTX 5000)에서 모델을 훈련하는 데 8시간이 걸립니다.
또한 디버깅할 수 있는 교육 로그도 제공합니다.
python train.py -m lanegcn여기에서 사전 훈련된 모델을 다운로드할 수 있습니다.
python test.py -m lanegcn --weight=/absolute/path/to/36.000.ckpt --split=test
python test.py -m lanegcn --weight=36.000.ckpt --split=val
정성적 결과
라벨(빨간색) 예측(녹색) 기타 에이전트(파란색)
정량적 결과 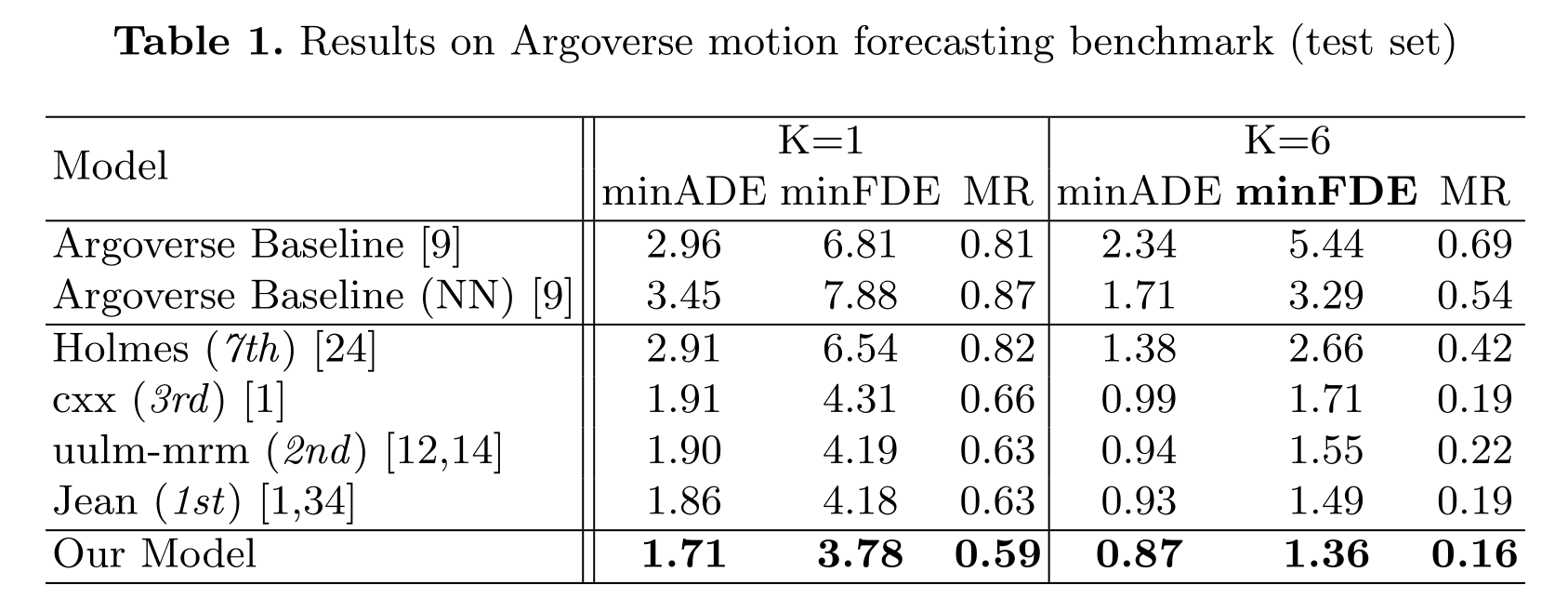
라이센스 확인
우리의 소스 코드를 사용하는 경우 다음을 인용해 보세요.
@InProceedings { liang2020learning ,
title = { Learning lane graph representations for motion forecasting } ,
author = { Liang, Ming and Yang, Bin and Hu, Rui and Chen, Yun and Liao, Renjie and Feng, Song and Urtasun, Raquel } ,
booktitle = { ECCV } ,
year = { 2020 }
}코드에 관해 궁금한 점이 있으면 이슈를 열고 @chenyuntc로 문의하세요.


