다운코드 편집자는 다음과 같이 보고했습니다. 워싱턴 대학 연구팀은 SAMURAI라는 새로운 시각적 추적 모델을 출시했습니다. 이 모델은 SAM2를 기반으로 하며 특히 빠르게 움직이는 자체 폐색 개체를 처리할 때 복잡한 장면에서 시각적 추적 문제를 극복하는 것을 목표로 합니다. SAMURAI는 시간적 모션 큐와 모션 인식 메모리 선택 메커니즘을 도입하여 재교육이나 미세 조정 없이 강력하고 정확한 추적을 달성함으로써 객체 모션 예측 기능과 마스크 선택 정확도를 크게 향상시킵니다. 강력한 제로샷 성능 덕분에 특정 데이터 세트에 대한 교육을 받지 않고도 잘 작동할 수 있습니다.
SAM2는 객체 분할 작업에서는 잘 수행되지만 시각적 추적에는 몇 가지 제한 사항이 있습니다. 예를 들어 혼잡한 장면에서 고정 창 기억은 선택한 메모리의 품질을 고려하지 못하여 비디오 시퀀스 전체에 오류가 전파될 수 있습니다.
이 문제를 해결하기 위해 연구팀은 시간적 모션 큐와 모션 인식 메모리 선택 메커니즘을 도입하여 객체 모션 예측 능력과 마스크 선택 정확도를 크게 향상시키는 SAMURAI를 제안했습니다. 이러한 혁신을 통해 SAMURAI는 재교육이나 미세 조정 없이 강력하고 정확한 추적을 달성할 수 있습니다.
실시간 작업 측면에서 SAMURAI는 강력한 제로샷 성능을 보여주었습니다. 이는 모델이 특정 데이터 세트에 대한 교육을 받지 않고도 여전히 잘 작동할 수 있음을 의미합니다.
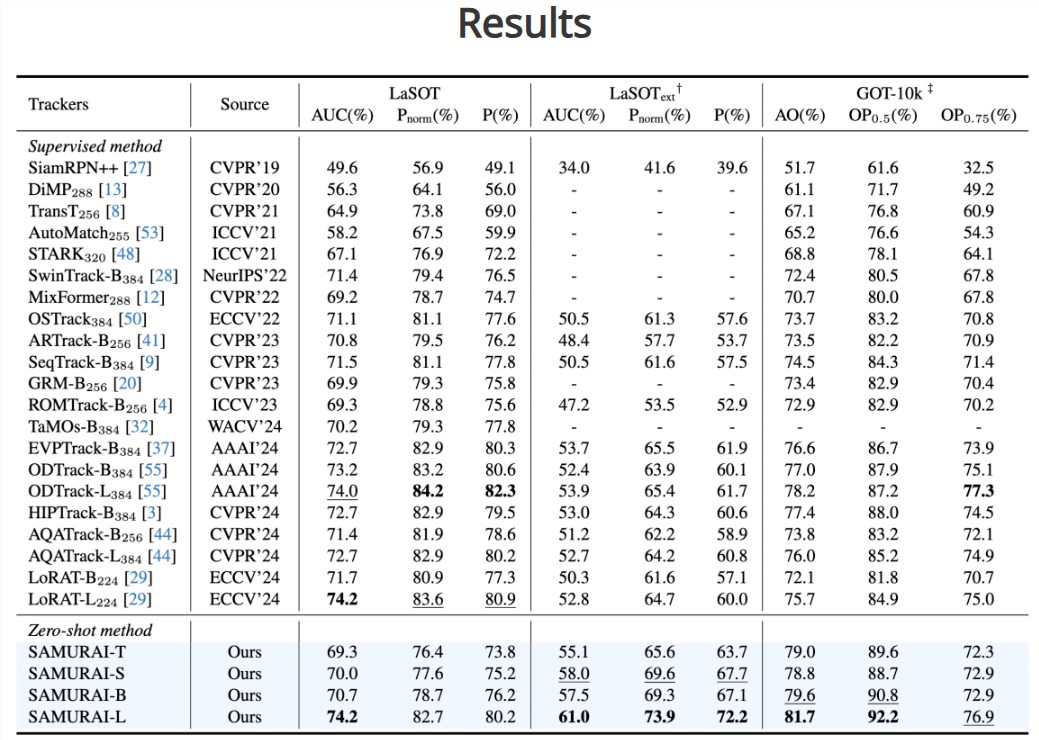
평가를 통해 연구팀은 여러 벤치마크 데이터 세트에서 SAMURAI의 성공률과 정확도가 크게 향상되었음을 확인했습니다. LaSOT-ext 데이터 세트에서 SAMURAI는 7.1%의 AUC 증가를 달성한 반면, GOT-10k 데이터 세트에서는 3.5%의 AO 증가를 달성했습니다. 또한 완전 감독 방법과 비교하여 SAMURAI는 LaSOT 데이터 세트에서 동등하게 경쟁력을 발휘하여 복잡한 추적 시나리오에서 견고성과 광범위한 응용 가능성을 보여줍니다.
연구팀은 SAMURAI의 성공이 향후 더욱 복잡하고 역동적인 환경에서 시각적 추적 기술을 적용할 수 있는 기반을 마련했다고 밝혔습니다. 그들은 이 혁신이 시각적 추적 분야의 발전을 촉진하고, 실시간 애플리케이션의 요구를 충족하며, 다양한 스마트 장치에 더 강력한 시각적 인식 기능을 제공할 수 있기를 바라고 있습니다.
프로젝트 입구: https://yangchris11.github.io/samurai/
SAMURAI 모델의 출현은 시각적 추적 기술에 새로운 혁신을 가져왔으며 복잡한 장면에서의 효율성과 정확성이 인상적입니다. 앞으로 이 모델은 자율주행, 로봇비전 등 분야에서 널리 활용돼 인공지능 기술의 발전이 더욱 촉진될 것으로 기대된다. Downcodes의 편집자는 SAMURAI가 앞으로 더욱 인상적인 결과를 얻을 수 있기를 기대합니다!