open3d_slam
1.0.0
open3d_slam é uma biblioteca C++ (cpp) para SLAM com integração ROS.
Contato principal: Edo Jelavic ([email protected])
Autores: Edo Jelavic, Julian Nubert, Marco Hutter
Pôster e Resumo: link
Documentação: link
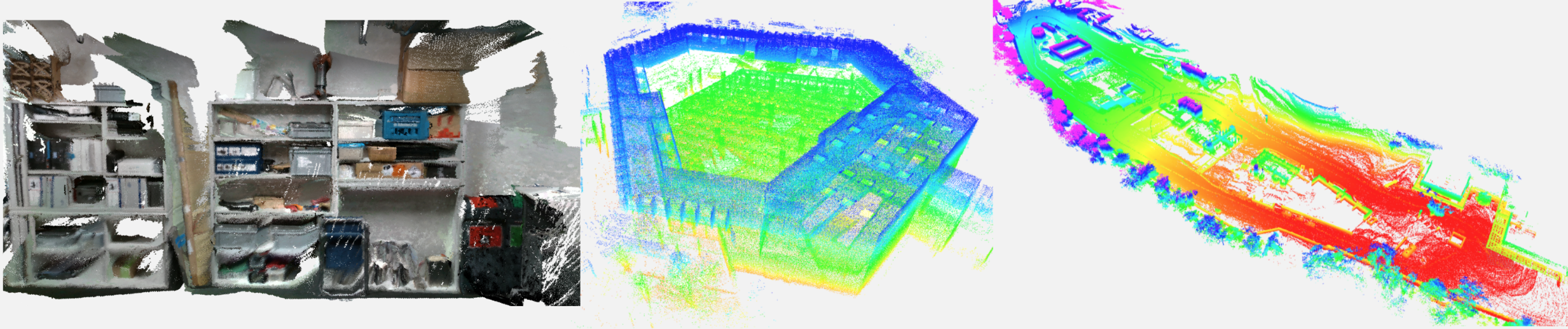
A principal diferença entre open3d_slam e outras bibliotecas SLAM existentes é que open3d_slam foi projetado para ser simples e usado para fins educacionais. Na verdade, open3d_slam usa apenas algoritmos bem estabelecidos em sua forma básica. Esperamos que isso facilite a entrada de recém-chegados no campo. Funciona com nuvens de pontos, nenhuma entrada adicional, como IMU, é necessária. Open3D_slam pode construir um mapa do zero ou localizar em um determinado mapa. O mapa fornecido também pode ser ampliado com novas medições.
Baseamos nossa implementação no Open3D, uma biblioteca bem mantida e de alto desempenho para processamento de dados 3D.
A documentação e conjuntos de dados de exemplo podem ser encontrados aqui Documentação open3d_slam.
Fornecemos um wrapper catkin para Open3D para que você possa usar Open3D facilmente em seus projetos ROS. Consulte a documentação em open3d_catkin/README.md.
Se você achar este trabalho útil ou usá-lo em sua pesquisa, considere citar o trabalho correspondente:
@inproceedings{jelavic2022open3d,
title={Open3D SLAM: Point Cloud Based Mapping and Localization for Education},
author={Jelavic, Edo and Nubert, Julian and Hutter, Marco},
booktitle={Robotic Perception and Mapping: Emerging Techniques, ICRA 2022 Workshop},
pages={24},
year={2022},
organization={ETH Zurich, Robotic Systems Lab}
}


