Este código extrai a rotação e a segmentação do mundo local de Manhattan de imagens em profundidade em tempo real. Aqui está um vídeo de demonstração para três sequências RGB-D diferentes: 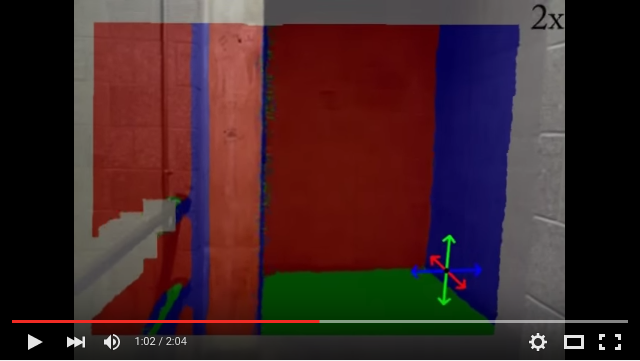
Se você estiver usando este código para sua pesquisa, cite
Real-time Manhattan World Rotation Estimation in 3D (Julian Straub,
Nishchal Bhandari, John J. Leonard, John W. Fisher III), In IROS, 2015.
Este código depende das outras bibliotecas a seguir e foi testado no Ubuntu 14.04.
Os núcleos da GPU foram testados em um NVIDIA Quadro K2000M com capacidade de computação 3.0.
Depois de ter essas dependências em vigor
make checkout && make configure && make
Isso verificará as dependências de alguns dos meus outros repositórios (JSCore, MMF, Cudepcl) e compilará tudo para ./build/
Depois de instalar a biblioteca, tente executar o seguinte para inferir o MF de uma cena simples após a suposição mundial de Manhattan:
./pod-build/bin/realtimeMF -i data/MIT_hallway_1_d.png -o MIT_hallway_1 -d
Haverá um arquivo .CSV de resultados com a rotação do MF e uma imagem sobrepondo a segmentação na parte superior da imagem em escala de cinza da cena.
Libcudapcl.so coleta todo o código CUDA em uma biblioteca compartilhada. O restante do código está na forma de arquivos de cabeçalho.
Allowed options:
-h [ --help ] produce help message
-m [ --mode ] arg mode of the rtmf (direct, approx, vmf)
-i [ --in ] arg path to input file
-o [ --out ] arg path to output file
-d [ --display ] display results
-B [ --B ] arg B for guided filter
-T [ --T ] arg number of iterations
--eps arg eps for guided filter
-f [ --f_d ] arg focal length of depth camera
--nCGIter arg max number of CG iterations
--dt arg steplength for linesearch
--tMax arg max length for linesearch
Allowed options:
-h [ --help ] produce help message
-m [ --mode ] arg mode of the rtmf (direct, approx, vmf)
-o [ --out ] arg path to output file
-d [ --display ] display results
-B [ --B ] arg B for guided filter
-T [ --T ] arg number of iterations
--eps arg eps for guided filter
-f [ --f_d ] arg focal length of depth camera
--nCGIter arg max number of CG iterations
--dt arg steplength for linesearch
--tMax arg max length for linesearch


