Navigating Ryze Tello Drones With MATLAB App
v1.1.1
Для интерактивного управления дроном Ryze® Tello, подключенным к вашему компьютеру под управлением MATLAB®, MathWorks® предоставляет приложение MATLAB — Ryze Tello Navigator. Это приложение поможет вам:
Просмотрите все дроны Ryze Tello, подключенные к сети Wi-Fi компьютера.
Выполните взлет/посадку дрона.
Управляйте навигацией дрона с помощью клавиатуры или кнопок управления навигацией в приложении.
Предварительный просмотр изображения с камеры и захват изображений.
Запишите видеопоток дрона в переменную рабочего пространства MATLAB.
Сгенерируйте сценарий MATLAB для завершенной навигации.
Установите MATLAB и пакет поддержки MATLAB для дронов Ryze Tello.
Выполните первоначальную настройку и настройку и подключитесь к одному или нескольким дронам Ryze Tello.
Загрузите или клонируйте этот репозиторий.
Перейдите к папке локального репозитория в MATLAB.
Выполните следующие команды в командном окне MATLAB:
добавитьпуть (пароль);
путь сохранения;
Запустите приложение, выполнив команду ryzeTelloNavigator .
Требуется версия MATLAB R2022a или новее.
Пакет поддержки MATLAB® для дронов Ryze Tello®
Убедитесь, что в списке устройств отображается именно тот дрон, которым вы хотите управлять с помощью приложения. Если дрона нет в списке, выполните установку и настройку еще раз.
| Шаг | Действие | Результат |
|---|---|---|
| 1 |  Нажмите на имя дрона в списке устройств и нажмите «Предполетная проверка» в разделе «Навигация» вверху. Нажмите на имя дрона в списке устройств и нажмите «Предполетная проверка» в разделе «Навигация» вверху. | Появится новое диалоговое окно «Выполнение предполетного контрольного списка». На время предполетной проверки все остальные элементы управления в приложении отключены. При наличии ошибок в диалоговом окне отображаются ссылки на необходимые действия по устранению неполадок. |
| 2 | Убедившись, что все предполетные проверки успешно завершены, нажмите «ОК». |  В правой части приложения появится сообщение «Предполетная проверка завершена» . Все остальные элементы управления также включены. В правой части приложения появится сообщение «Предполетная проверка завершена» . Все остальные элементы управления также включены. |
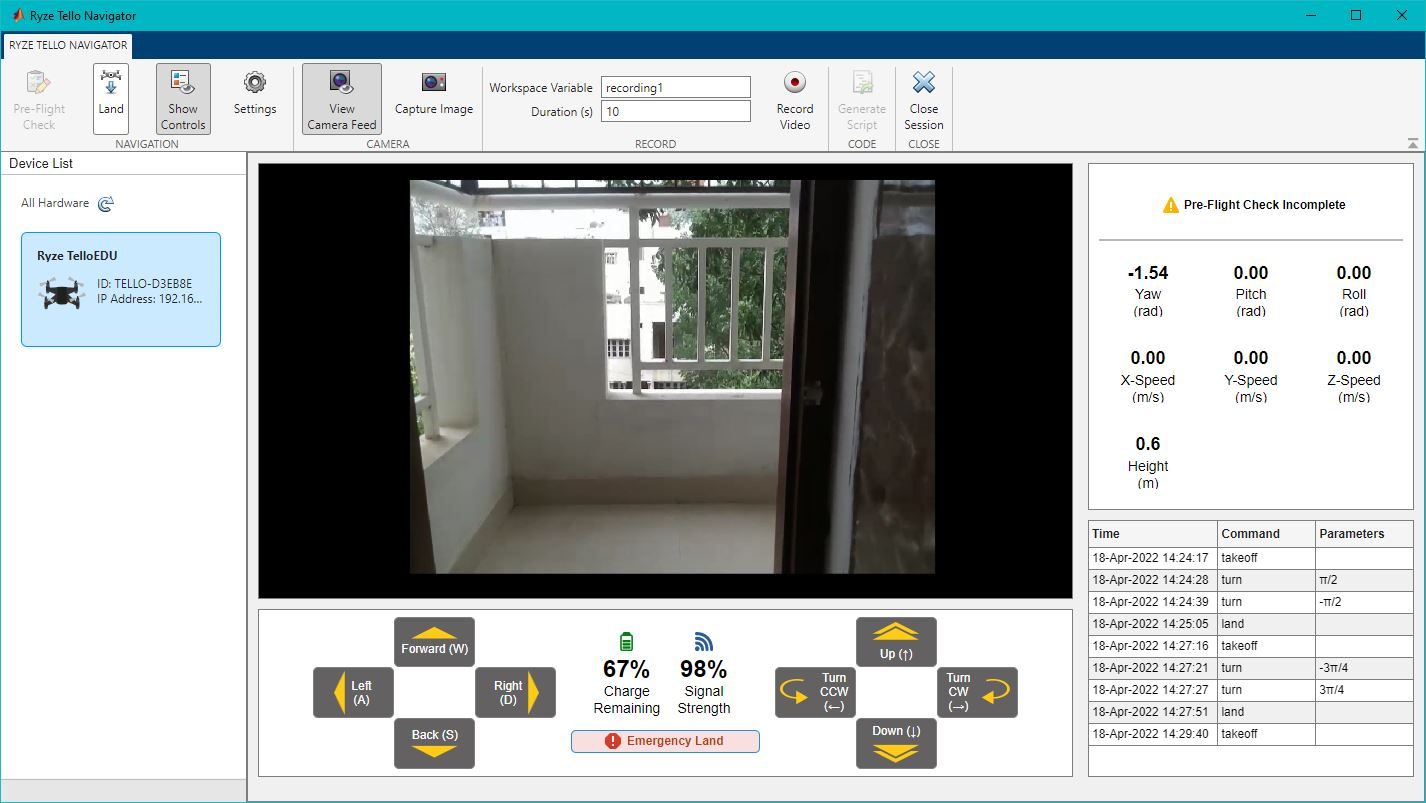
Ryze Tello Navigator помогает вам выполнять взлет/посадку и интерактивно управлять дроном Ryze Tello.
Примечание . Прежде чем приступить к взлету дрона, ознакомьтесь с общими мерами предосторожности. Если вы чувствуете какой-либо ущерб, который может быть причинен дрону и окружающей среде во время взлета или при выполнении ручного навигационного управления (как указано в последующих шагах), вы можете нажать «Аварийная посадка» . Нажатие на эту кнопку вызывает аварийное отключение двигателей дрона, в результате чего он падает на землю с текущей высоты (для дронов Tello EDU) или заставляет дрон приземлиться вертикально с текущего положения (для дронов Tello).
| Шаг | Действие | Результат |
|---|---|---|
| 1 |  Убедитесь, что заряд аккумулятора и мощность сигнала дрона, отображаемые в приложении, достаточны для выполнения взлета и управления. Убедитесь, что заряд аккумулятора и мощность сигнала дрона, отображаемые в приложении, достаточны для выполнения взлета и управления. | |
| 2 |  Нажмите «Просмотреть изображение с камеры», чтобы убедиться, что изображение с камеры дрона работает правильно. Нажмите «Просмотреть изображение с камеры», чтобы убедиться, что изображение с камеры дрона работает правильно. | Приложение отображает предварительный просмотр, как его видит камера дрона перед взлетом. Позже, когда дрон начнет двигаться, предварительный просмотр будет обновлен прямой трансляцией с камеры. |
| 3 |  Либо нажмите клавишу «Пробел» на клавиатуре, либо нажмите «Снять» , которая появится в разделе «Навигация» в области панели инструментов. Либо нажмите клавишу «Пробел» на клавиатуре, либо нажмите «Снять» , которая появится в разделе «Навигация» в области панели инструментов. | Двигатели дрона запускаются, дрон взлетает на определенную высоту и зависает в этом положении. Кнопка «Взлет» заменена на кнопку «Приземлиться» . |
| 4 | Выполняйте ручную навигацию дрона из приложения, щелкая соответствующие значки в приложении или используя клавиатуру. | Дрон движется в соответствии с активированной вами навигационной системой. Видео с камеры (предварительный просмотр), если оно включено, также обновляется. Чтобы увеличить площадь окна предварительного просмотра в приложении, вы можете скрыть панель с кнопками для ручного управления. Нажмите «Показать элементы управления» , чтобы отключить панель. Вы по-прежнему можете использовать клавиши клавиатуры для управления дроном. |
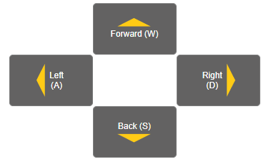
Клавиши WASD:
В – двигаться вперед
А – двигаться влево
S – двигаться назад
Д – двигаться вправо.
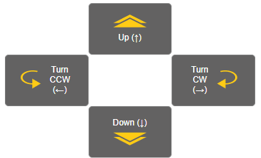
Клавиши со стрелками:
▲ – Переместите дрон вверх.
▼ – Переместите дрон вниз.
◄ – Поверните дрон против часовой стрелки.
► – Поверните дрон по часовой стрелке
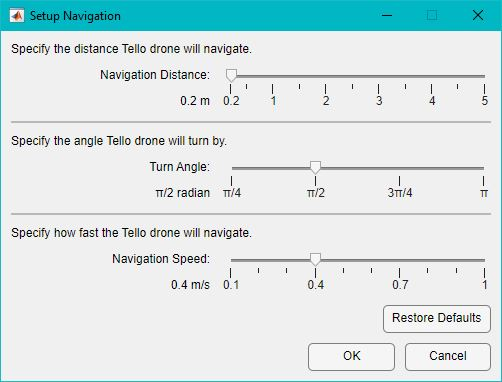
Вы можете изменить настройки навигации, которые дрон использует каждый раз, когда вы запускаете движение в определенном направлении. Нажмите «Настройки» , чтобы открыть диалоговое окно «Настройка навигации», и укажите значения расстояния, угла и скорости с помощью ползунков. Если вы хотите восстановить значения по умолчанию (расстояние навигации: 0,2 м, угол поворота: π/2, скорость навигации: 0,4 м/с), нажмите «Восстановить значения по умолчанию» в диалоговом окне.

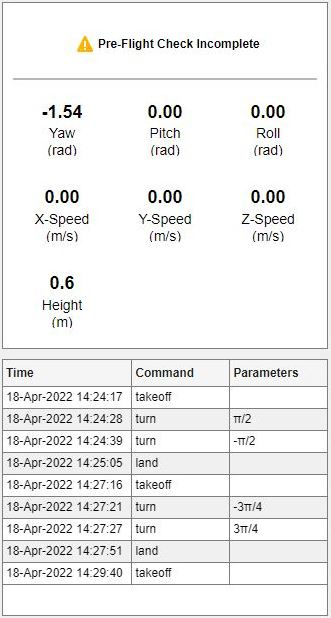
Приложение также отображает навигационные данные в реальном времени (снятые датчиками дрона), а также журнал команд, которые вы запускали с помощью кнопок навигации или клавиш клавиатуры. Эта информация отображается на правой боковой панели.
Ryze Tello Navigator помогает вам захватывать изображения и записывать видео, как будто они видны через FPV-камеру дрона Ryze Tello.
| Шаг | Действие | Результат |
|---|---|---|
| 1 |  Снимайте по одному изображению за раз. Снимайте по одному изображению за раз. | Изображение сохраняется как переменная рабочей области. |
| 2 |  Определите переменную рабочей области и продолжительность записи видео, а затем нажмите «Запись видео». Определите переменную рабочей области и продолжительность записи видео, а затем нажмите «Запись видео». | Видео с камеры дрона начинает записываться в течение заданного времени. Нажмите «Стоп», чтобы остановить запись в любой момент во время записи, после чего видео автоматически сохраняется в рабочей области в виде массива изображений. |
Ryze Tello Navigator поможет вам создать сценарий Live Editor для выполненной вами навигации. Вы можете использовать этот скрипт, чтобы определить первоначальную настройку и траекторию полета дрона, а затем добавить собственные алгоритмы для выполнения дополнительных рабочих процессов.

Для этого нажмите «Создать сценарий» после успешной посадки дрона.
| Предупреждения | Проблема и рекомендуемые действия |
|---|---|
| Низкий уровень заряда батареи | Приложение начинает отображать предупреждения, если показатель оставшегося заряда показывает значение ниже 20%, а дрон летит или зависает. Если уровень заряда батареи падает ниже 10%, дрон автоматически приземляется со своего текущего положения. Чтобы избежать этого, обязательно приземлите дрон с помощью кнопки «Приземлиться» в приложении, а затем замените аккумулятор дрона. |
| Низкий уровень сигнала | Приложение постоянно отображает значения уровня сигнала во время полета дрона. Рекомендуется принять необходимые меры, если уровень сигнала ниже 20%, чтобы не потерять контроль над дроном. Если соединение с дроном потеряно, появится диалоговое окно с возможностью восстановить соединение с дроном. Если это по-прежнему не удается, отображается сообщение об ошибке. |
Лицензия доступна в файле LICENSE.TXT в этом репозитории GitHub.
МАТЛАБ Центральный
Авторские права принадлежат MathWorks, Inc., 2022 г.


