open3d_slam
1.0.0
open3d_slam — это библиотека C++ (cpp) для SLAM с интеграцией ROS.
Основной контакт: Эдо Елавич ([email protected])
Авторы: Эдо Елавич, Джулиан Нуберт, Марко Хуттер
Плакат и аннотация: ссылка
Документация: ссылка
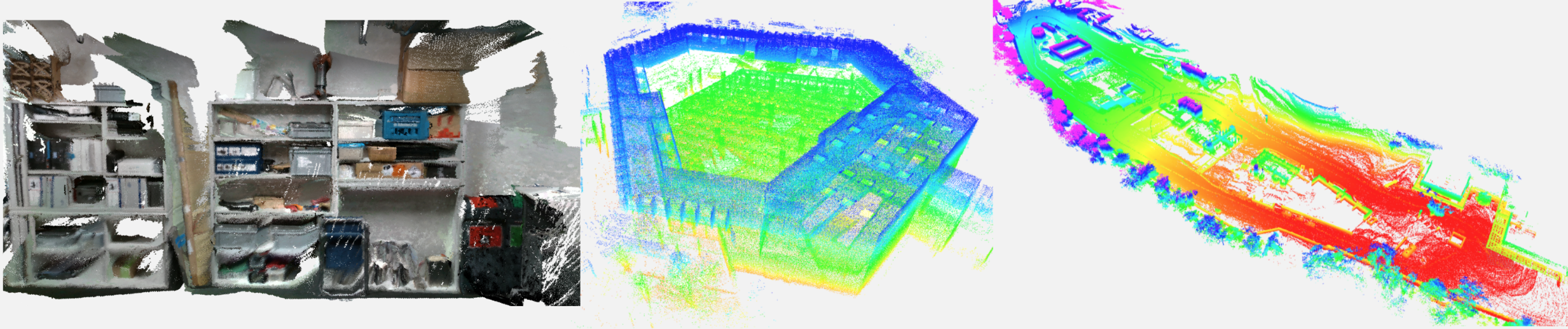
Основное различие между open3d_slam и другими библиотеками SLAM заключается в том, что open3d_slam был разработан как простой и использовался в образовательных целях. Фактически, open3d_slam использует только хорошо зарекомендовавшие себя алгоритмы в их базовой форме. Мы надеемся, что это облегчит выход новичков на поле. Он работает с облаками точек, никаких дополнительных данных, таких как IMU, не требуется. Open3D_slam может построить карту с нуля или локализовать ее на заданной карте. Данная карта также может быть дополнена новыми измерениями.
В основе нашей реализации лежит Open3D, хорошо поддерживаемая и высокопроизводительная библиотека для обработки 3D-данных.
Документацию и примеры наборов данных можно найти здесь. Документация open3d_slam.
Мы предоставляем обертку для Open3D, чтобы вы могли легко использовать Open3D в своих проектах ROS. См. документацию в open3d_catkin/README.md.
Если вы найдете эту работу полезной или используете ее для своих исследований, пожалуйста, рассмотрите возможность цитирования соответствующей работы:
@inproceedings{jelavic2022open3d,
title={Open3D SLAM: Point Cloud Based Mapping and Localization for Education},
author={Jelavic, Edo and Nubert, Julian and Hutter, Marco},
booktitle={Robotic Perception and Mapping: Emerging Techniques, ICRA 2022 Workshop},
pages={24},
year={2022},
organization={ETH Zurich, Robotic Systems Lab}
}


