jetson nano baseboard
v1.4.6
Copyright (C) 2020-2024 Antmicro

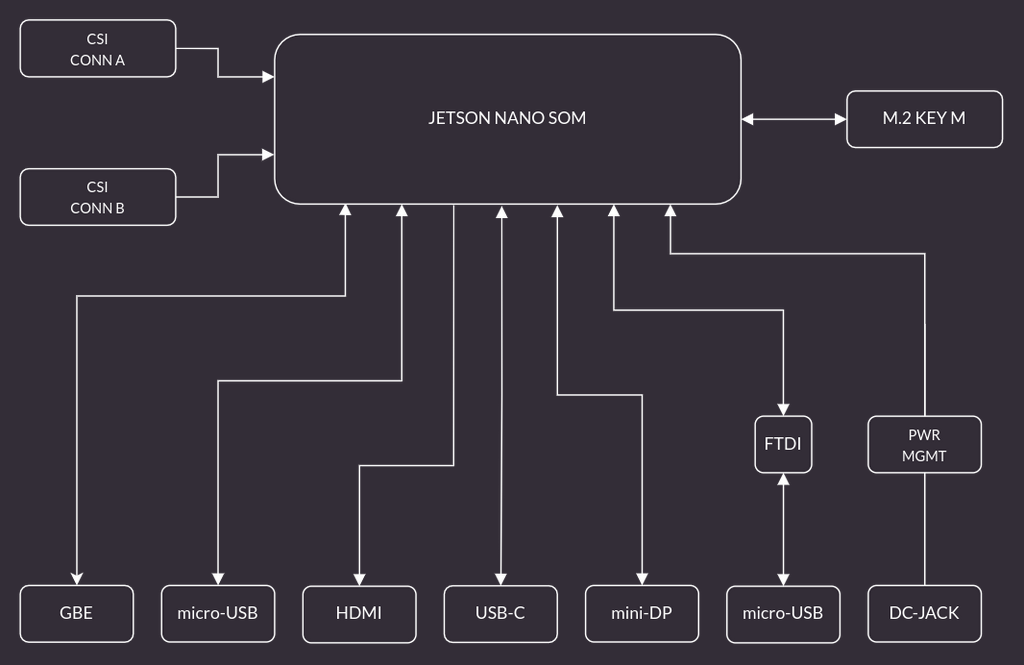
Этот проект содержит открытые файлы проектирования оборудования для основной платы, поддерживающую NVIDIA Jetson Nano, Xavier NX и TX2 NX SOMS. Он был создан Antmicro, пользовательским оборудованием, программным обеспечением и инженерной компанией AI и партнером Nvidia Jetson Ecosystem. Плата может быть связана с видеопоможьями MIPI CSI-2 через единый гибкий разъем плоского кабеля (FFC), поддерживая до 4 датчиков в конфигурации с 2 полосами движения или 3 датчика в конфигурации с 4 полосами. Пожалуйста, обратитесь к Руководству по проектированию продукта для соответствующего SOM для получения более подробной информации о поддерживаемых сопоставлениях CSI Lane. Вы найдете связанные с SOM ресурсы в центре загрузки Nvidia Jetson.
Основная платка, его пользовательские варианты, разработанные AntMicro на спецификацию клиента, и основные аксессуары могут быть приобретены у компонентов способных роботов.
Дизайн файлов для этого проекта, начиная с Rev. 1.5, предоставляются и поддерживаются в Кикаде. Старые изменения совета директоров были подготовлены в Altium Designer и хранятся в отдельной ветви.
Основной каталог содержит файлы проектирования KICAD, лицензию и readme. Остальные файлы хранятся в следующих каталогах:
img - содержит графику для этого чтенияdoc - содержит сгенерированные схемы и другую документациюlinux-patches - содержит исправления, которые добавляют поддержку камеры для модулей камеры из Allied Vision (см. Раздел BSP ниже) Доска может быть произведена и собрана с использованием предоставленных файлов проектирования. Пожалуйста, посмотрите на механические слои для получения дополнительной информации о том, что стека PCB, рекомендованная для изготовления. Плата может быть включена под действием напряжения в диапазоне 6-36VDC. Рекомендуется использовать предложение DC 12V 2A для питания платы. Плата имеет интегрированный секвенсор мощности, который запускает модуль автоматически сразу после применения источника питания.
Интерфейсы ввода / вывода основной платы поддерживаются в стандартном Linux для BSP Tegra (L4T), предоставляемых NVIDIA для Jetson Nano / Xavier NX / TX2 NX. BSP должен работать с базовой платой Jetson с открытым исходным кодом из коробки. Тем не менее, использовать основную плату с различными камерами и другими аксессуарами, вам может потребоваться модификации. Если вы планируете использовать плату с помощью Alvium-датчиков Alvied Vision Alvium, существует каталог linux-patches , который содержит патч-файлы, которые добавляют поддержку камер союзников Vision для этого основного платы с модулем Jetson Nano NX. Патчи названы с выпуском L4T и могут быть применены к соответствующим ветвям репозитория Linux, высвобождаемых Allied Vision. Услуги Antmicro включают разработку BSP, поэтому вы можете нанять нас, чтобы внести необходимые модификации для вас.
Вы можете использовать интерфейс USB OTG для загрузки изображения BSP в SOM, вставленную в плинтус.
Большинство сообщений отладки предоставляются через последовательную консоль. Плата включает в себя чип FTDI, предоставляющий интерфейс UART для хост -ПК. Пожалуйста, обратитесь к схематическим листам для получения более подробной информации. Канал UART отладки по умолчанию доступен через /dev/ttyUSB0 (при условии, что нет других единиц FTDI, подключенных к вашему ПК). Baudrate по умолчанию для подключения последовательной отладки составляет 115200 бод с 8-разрядной передачей, 1 стоп-битом и без контроля потока.
Последний пересмотр платы (1.5.x) включает в себя файлы проектирования, преобразованные в KICAD. Дом был изменен, поэтому доска может быть произведена, несмотря на глобальную ситуацию нехватки чипов. Редакция 1.5.x изменяет мультиплексор I2C (PCA9548 -> PCA9547), используемый для обработки камер и аксессуаров для видео. Возможно, вам придется настроить записи Devicetree для аксессуаров для видео, чтобы они работали с новым чипом мультиплексора i2c.
Этот проект лицензирован по лицензии Apache-2.0.


