ultralytics
v8.3.31 - `ultralytics 8.3.31` add `max_num_obj` factor for `AutoBatch` (#17514)
中文 | เกาหลี | ภาษาญี่ปุ่น | รัสสกี้ | เยอรมัน | ฝรั่งเศส | ภาษาสเปน | ภาษาโปรตุเกส | เตอร์กเช่ | Tiếng Viết | العربية
![]()
Ultralytics YOLO11 เป็นโมเดลที่ล้ำสมัย (SOTA) ซึ่งต่อยอดมาจากความสำเร็จของ YOLO เวอร์ชันก่อนหน้า และนำเสนอฟีเจอร์และการปรับปรุงใหม่ๆ เพื่อเพิ่มประสิทธิภาพและความยืดหยุ่นให้ดียิ่งขึ้น YOLO11 ได้รับการออกแบบมาให้รวดเร็ว แม่นยำ และใช้งานง่าย ทำให้เป็นตัวเลือกที่ยอดเยี่ยมสำหรับการตรวจจับและติดตามวัตถุที่หลากหลาย การแบ่งส่วนอินสแตนซ์ การจัดหมวดหมู่รูปภาพ และงานการประมาณค่าท่าทาง
เราหวังว่าแหล่งข้อมูลที่นี่จะช่วยให้คุณได้รับประโยชน์สูงสุดจาก YOLO โปรดเรียกดูเอกสาร Ultralytics เพื่อดูรายละเอียด แจ้งปัญหาบน GitHub เพื่อรับการสนับสนุน คำถาม หรือการสนทนา ร่วมเป็นสมาชิกของ Ultralytics Discord, Reddit และฟอรัม!
หากต้องการขอสิทธิ์ใช้งานระดับองค์กร โปรดกรอกแบบฟอร์มที่ Ultralytics Licensing
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
เอกสารประกอบ
ดูด้านล่างสำหรับตัวอย่างการติดตั้งและการใช้งานอย่างรวดเร็ว และดูเอกสารของเราสำหรับเอกสารฉบับเต็มเกี่ยวกับการฝึกอบรม การตรวจสอบความถูกต้อง การคาดการณ์ และการปรับใช้
Pip ติดตั้งแพ็คเกจ ultralytics รวมถึงข้อกำหนดทั้งหมดในสภาพแวดล้อม Python>=3.8 ด้วย PyTorch>=1.8
pip ติดตั้ง ultralytics
สำหรับวิธีการติดตั้งอื่นๆ รวมถึง Conda, Docker และ Git โปรดดูที่คู่มือการเริ่มต้นฉบับย่อ
YOLO อาจนำไปใช้โดยตรงใน Command Line Interface (CLI) ด้วยคำสั่ง yolo :
yolo ทำนาย model=yolo11n.pt แหล่งที่มา ='https://ultralytics.com/images/bus.jpg'
yolo สามารถนำไปใช้สำหรับงานและโหมดที่หลากหลาย และยอมรับข้อโต้แย้งเพิ่มเติม เช่น imgsz=640 ดูตัวอย่างเอกสาร YOLO CLI
YOLO อาจใช้โดยตรงในสภาพแวดล้อม Python และยอมรับอาร์กิวเมนต์เดียวกันกับในตัวอย่าง CLI ด้านบน:
จากการนำเข้า ultralytics YOLO# โหลด modelmodel = YOLO("yolo11n.pt")# ฝึก modeltrain_results = model.train( data="coco8.yaml", # path to dataset YAML epochs=100, # number of training epochs imgsz= 640, # อุปกรณ์ขนาดภาพการฝึกอบรม = "cpu", # อุปกรณ์ที่จะทำงานเช่นอุปกรณ์ = 0 หรืออุปกรณ์ = 0,1,2,3 หรือ อุปกรณ์=cpu)# ประเมินประสิทธิภาพของโมเดลในการตรวจสอบความถูกต้อง setmetrics = model.val()# ดำเนินการตรวจจับวัตถุบน imageresults = model("path/to/image.jpg")results[0].show()# ส่งออกโมเดล ไปที่ ONNX formatpath = model.export(format="onnx") # return path ไปยังโมเดลที่ส่งออกดู YOLO Python Docs สำหรับตัวอย่างเพิ่มเติม
โมเดล
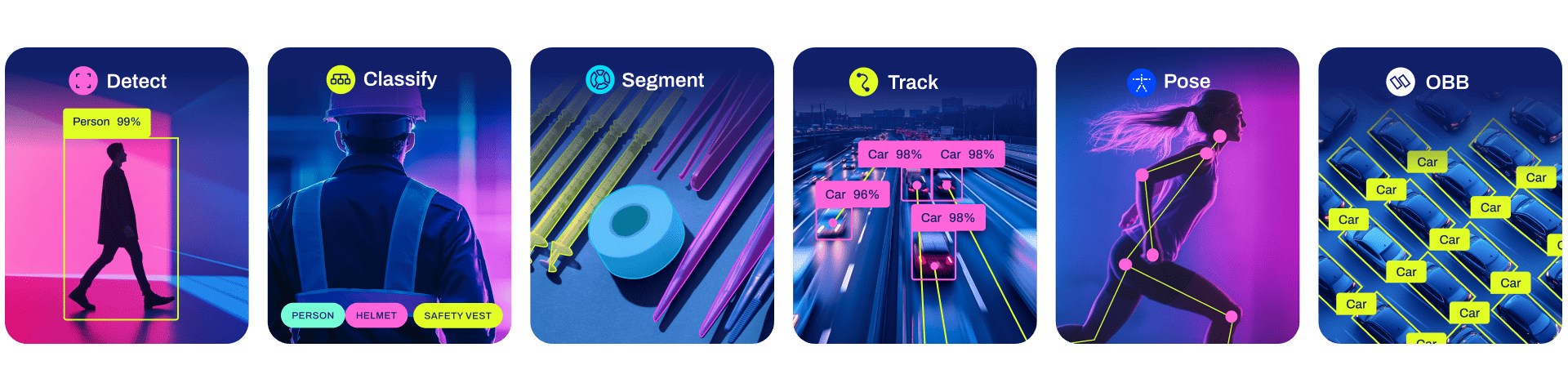
มีโมเดล YOLO11 Detect, Segment และ Pose ที่ได้รับการฝึกล่วงหน้าบนชุดข้อมูล COCO ไว้ที่นี่ เช่นเดียวกับ YOLO11 Classify โมเดลที่ได้รับการฝึกล่วงหน้าบนชุดข้อมูล ImageNet โหมดติดตามใช้ได้กับโมเดล Detect, Segment และ Pose ทุกรุ่น
ทุกรุ่นจะดาวน์โหลดโดยอัตโนมัติจาก Ultralytics รุ่นล่าสุดเมื่อใช้ครั้งแรก
ดูตัวอย่างการใช้งานในเอกสารการตรวจจับสำหรับโมเดลเหล่านี้ที่ได้รับการฝึกบน COCO ซึ่งรวมถึงคลาสที่ได้รับการฝึกล่วงหน้า 80 คลาส
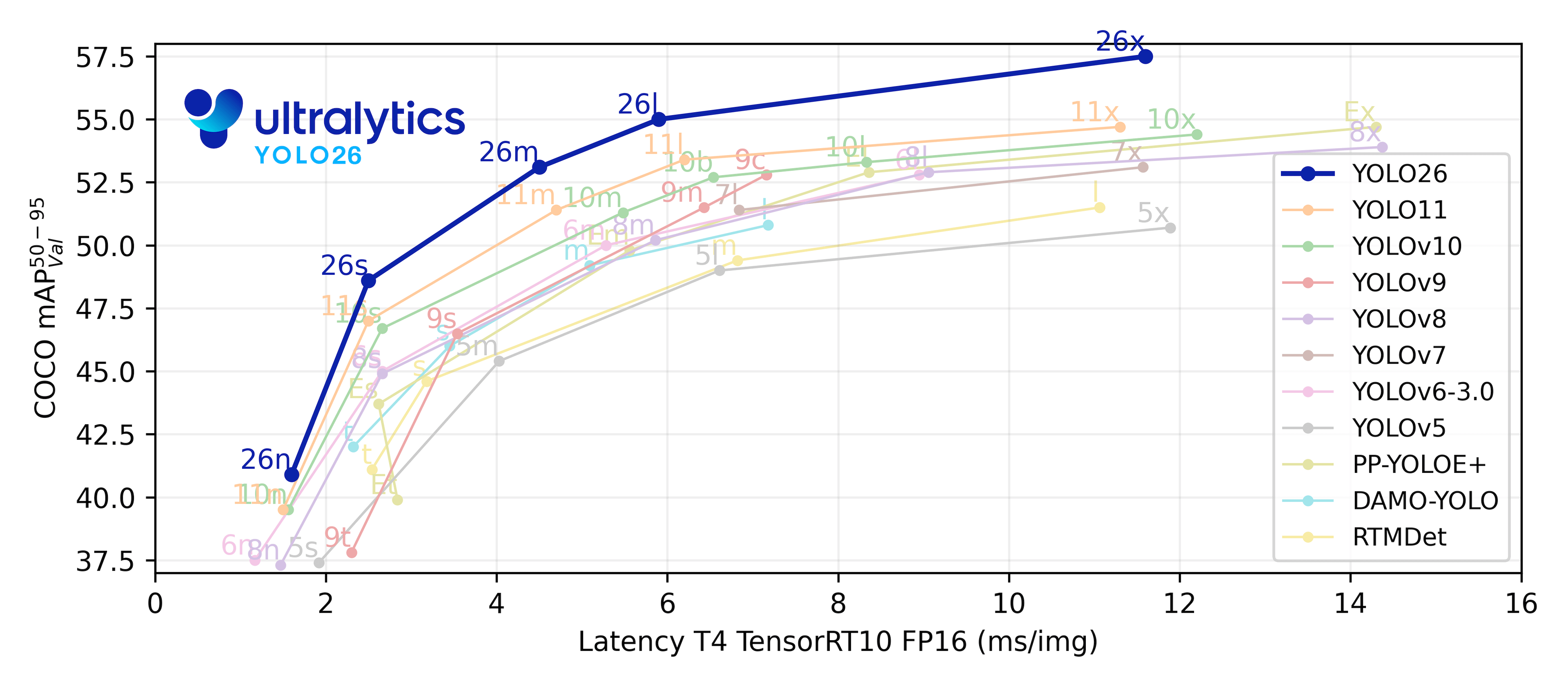
| แบบอย่าง | ขนาด (พิกเซล) | มูลค่า mAP 50-95 | ความเร็ว ซีพียู ONNX (มิลลิวินาที) | ความเร็ว T4 เทนเซอร์RT10 (มิลลิวินาที) | พารามิเตอร์ (ม) | ฟลอป (ข) |
|---|---|---|---|---|---|---|
| โยโล11น | 640 | 39.5 | 56.1 ± 0.8 | 1.5 ± 0.0 | 2.6 | 6.5 |
| โยโล11 | 640 | 47.0 | 90.0 ± 1.2 | 2.5 ± 0.0 | 9.4 | 21.5 |
| โยโล11ม | 640 | 51.5 | 183.2 ± 2.0 | 4.7 ± 0.1 | 20.1 | 68.0 |
| โยโล11ล | 640 | 53.4 | 238.6 ± 1.4 | 6.2 ± 0.1 | 25.3 | 86.9 |
| โยโล11x | 640 | 54.7 | 462.8 ± 6.7 | 11.3 ± 0.2 | 56.9 | 194.9 |
ค่า mAP val ใช้สำหรับโมเดลเดี่ยวขนาดเดียวบนชุดข้อมูล COCO val2017
ทำซ้ำโดย yolo val detect data=coco.yaml device=0
ความเร็ว เฉลี่ยบนอิมเมจ COCO val โดยใช้อินสแตนซ์ Amazon EC2 P4d
ทำซ้ำโดย yolo val detect data=coco.yaml batch=1 device=0|cpu
ดูเอกสารการแบ่งส่วนสำหรับตัวอย่างการใช้งานกับโมเดลเหล่านี้ที่ได้รับการฝึกบน COCO-Seg ซึ่งรวมถึงคลาสที่ได้รับการฝึกล่วงหน้า 80 คลาส
| แบบอย่าง | ขนาด (พิกเซล) | กล่อง แมพ 50-95 | หน้ากาก แมป 50-95 | ความเร็ว ซีพียู ONNX (มิลลิวินาที) | ความเร็ว T4 เทนเซอร์RT10 (มิลลิวินาที) | พารามิเตอร์ (ม) | ฟลอป (ข) |
|---|---|---|---|---|---|---|---|
| YOLO11n-seg | 640 | 38.9 | 32.0 | 65.9 ± 1.1 | 1.8 ± 0.0 | 2.9 | 10.4 |
| YOLO11s-seg | 640 | 46.6 | 37.8 | 117.6 ± 4.9 | 2.9 ± 0.0 | 10.1 | 35.5 |
| YOLO11m-เซก | 640 | 51.5 | 41.5 | 281.6 ± 1.2 | 6.3 ± 0.1 | 22.4 | 123.3 |
| YOLO11l-seg | 640 | 53.4 | 42.9 | 344.2 ± 3.2 | 7.8 ± 0.2 | 27.6 | 142.2 |
| YOLO11x-seg | 640 | 54.7 | 43.8 | 664.5 ± 3.2 | 15.8 ± 0.7 | 62.1 | 319.0 |
ค่า mAP val ใช้สำหรับโมเดลเดี่ยวขนาดเดียวบนชุดข้อมูล COCO val2017
ทำซ้ำโดย yolo val segment data=coco-seg.yaml device=0
ความเร็ว เฉลี่ยบนอิมเมจ COCO val โดยใช้อินสแตนซ์ Amazon EC2 P4d
ทำซ้ำโดย yolo val segment data=coco-seg.yaml batch=1 device=0|cpu
ดูเอกสารการจำแนกประเภทสำหรับตัวอย่างการใช้งานกับโมเดลเหล่านี้ที่ได้รับการฝึกบน ImageNet ซึ่งรวมถึงคลาสที่ได้รับการฝึกล่วงหน้า 1,000 คลาส
| แบบอย่าง | ขนาด (พิกเซล) | ตามมาตรฐาน ท็อป1 | ตามมาตรฐาน ท็อป5 | ความเร็ว ซีพียู ONNX (มิลลิวินาที) | ความเร็ว T4 เทนเซอร์RT10 (มิลลิวินาที) | พารามิเตอร์ (ม) | ฟลอป (B) ที่ 640 |
|---|---|---|---|---|---|---|---|
| YOLO11n-cls | 224 | 70.0 | 89.4 | 5.0 ± 0.3 | 1.1 ± 0.0 | 1.6 | 3.3 |
| YOLO11s-cls | 224 | 75.4 | 92.7 | 7.9 ± 0.2 | 1.3 ± 0.0 | 5.5 | 12.1 |
| YOLO11m-cls | 224 | 77.3 | 93.9 | 17.2 ± 0.4 | 2.0 ± 0.0 | 10.4 | 39.3 |
| YOLO11l-cls | 224 | 78.3 | 94.3 | 23.2 ± 0.3 | 2.8 ± 0.0 | 12.9 | 49.4 |
| YOLO11x-cls | 224 | 79.5 | 94.9 | 41.4 ± 0.9 | 3.8 ± 0.0 | 28.4 | 110.4 |
ค่า acc คือความแม่นยำของโมเดลในชุดการตรวจสอบชุดข้อมูล ImageNet
ทำซ้ำโดย yolo val classify data=path/to/ImageNet device=0
ความเร็ว เฉลี่ยบนอิมเมจ ImageNet โดยใช้อินสแตนซ์ Amazon EC2 P4d
ทำซ้ำโดย yolo val classify data=path/to/ImageNet batch=1 device=0|cpu
ดูตัวอย่างการใช้งาน Pose Docs กับโมเดลเหล่านี้ที่ได้รับการฝึกบน COCO-Pose ซึ่งรวมถึงคลาสที่ได้รับการฝึกล่วงหน้า 1 คลาสต่อคน
| แบบอย่าง | ขนาด (พิกเซล) | ท่า แมป 50-95 | ท่า แมป 50 | ความเร็ว ซีพียู ONNX (มิลลิวินาที) | ความเร็ว T4 เทนเซอร์RT10 (มิลลิวินาที) | พารามิเตอร์ (ม) | ฟลอป (ข) |
|---|---|---|---|---|---|---|---|
| YOLO11n-ท่า | 640 | 50.0 | 81.0 | 52.4 ± 0.5 | 1.7 ± 0.0 | 2.9 | 7.6 |
| YOLO11s-ท่า | 640 | 58.9 | 86.3 | 90.5 ± 0.6 | 2.6 ± 0.0 | 9.9 | 23.2 |
| YOLO11m-ท่า | 640 | 64.9 | 89.4 | 187.3 ± 0.8 | 4.9 ± 0.1 | 20.9 | 71.7 |
| YOLO11l-ท่า | 640 | 66.1 | 89.9 | 247.7 ± 1.1 | 6.4 ± 0.1 | 26.2 | 90.7 |
| YOLO11x-ท่า | 640 | 69.5 | 91.1 | 488.0 ± 13.9 | 12.1 ± 0.2 | 58.8 | 203.3 |
ค่า mAP val ใช้สำหรับโมเดลเดี่ยวขนาดเดียวบนชุดข้อมูล COCO Keypoints val2017
ทำซ้ำโดย yolo val pose data=coco-pose.yaml device=0
ความเร็ว เฉลี่ยบนอิมเมจ COCO val โดยใช้อินสแตนซ์ Amazon EC2 P4d
ทำซ้ำโดย yolo val pose data=coco-pose.yaml batch=1 device=0|cpu
ดูเอกสาร OBB สำหรับตัวอย่างการใช้งานกับโมเดลเหล่านี้ที่ได้รับการฝึกบน DOTAv1 ซึ่งรวมถึงคลาสที่ได้รับการฝึกล่วงหน้า 15 คลาส
| แบบอย่าง | ขนาด (พิกเซล) | การทดสอบ แมป 50 | ความเร็ว ซีพียู ONNX (มิลลิวินาที) | ความเร็ว T4 เทนเซอร์RT10 (มิลลิวินาที) | พารามิเตอร์ (ม) | ฟลอป (ข) |
|---|---|---|---|---|---|---|
| YOLO11n-obb | 1,024 | 78.4 | 117.6 ± 0.8 | 4.4 ± 0.0 | 2.7 | 17.2 |
| YOLO11s-obb | 1,024 | 79.5 | 219.4 ± 4.0 | 5.1 ± 0.0 | 9.7 | 57.5 |
| YOLO11m-obb | 1,024 | 80.9 | 562.8 ± 2.9 | 10.1 ± 0.4 | 20.9 | 183.5 |
| YOLO11l-obb | 1,024 | 81.0 | 712.5 ± 5.0 | 13.5 ± 0.6 | 26.2 | 232.0 |
| YOLO11x-obb | 1,024 | 81.3 | 1408.6 ± 7.7 | 28.6 ± 1.0 | 58.8 | 520.2 |
ค่า ทดสอบ mAP ใช้สำหรับมัลติสเกลโมเดลเดียวบนชุดข้อมูล DOTAv1
ทำซ้ำโดย yolo val obb data=DOTAv1.yaml device=0 split=test และส่งผลรวมไปยังการประเมิน DOTA
ความเร็ว เฉลี่ยบนอิมเมจ DOTAv1 โดยใช้อินสแตนซ์ Amazon EC2 P4d
ทำซ้ำโดย yolo val obb data=DOTAv1.yaml batch=1 device=0|cpu
บูรณาการ
การบูรณาการที่สำคัญของเรากับแพลตฟอร์ม AI ชั้นนำจะขยายฟังก์ชันการทำงานของข้อเสนอของ Ultralytics ปรับปรุงงานต่างๆ เช่น การติดฉลากชุดข้อมูล การฝึกอบรม การแสดงภาพ และการจัดการแบบจำลอง ค้นพบว่า Ultralytics ร่วมมือกับ W&B, Comet, Roboflow และ OpenVINO สามารถเพิ่มประสิทธิภาพเวิร์กโฟลว์ AI ของคุณได้อย่างไร

![]()
![]()
![]()
![]()
![]()
![]()
![]()
| Ultralytics HUB ? | ดับเบิลยูแอนด์บี | ดาวหาง ⭐ ใหม่ | เวทมนตร์ประสาท |
|---|---|---|---|
| ปรับปรุงเวิร์กโฟลว์ YOLO: ติดป้าย ฝึกอบรม และปรับใช้ได้อย่างง่ายดายด้วย Ultralytics HUB ลองตอนนี้! | ติดตามการทดลอง ไฮเปอร์พารามิเตอร์ และผลลัพธ์ด้วยน้ำหนักและอคติ | ฟรีตลอดไป Comet ให้คุณบันทึกโมเดล YOLO11 ฝึกต่อ และแสดงภาพและแก้ไขการคาดการณ์แบบโต้ตอบได้ | รันการอนุมาน YOLO11 เร็วขึ้นสูงสุด 6 เท่าด้วย Neural Magic DeepSparse |
Ultralytics HUB
สัมผัสประสบการณ์ AI ที่ราบรื่นด้วย Ultralytics HUB ⭐ โซลูชันครบวงจรสำหรับการแสดงภาพข้อมูล YOLO11 ? การฝึกอบรมโมเดลและการปรับใช้โดยไม่ต้องเขียนโค้ดใดๆ เปลี่ยนภาพให้เป็นข้อมูลเชิงลึกที่นำไปใช้ได้จริง และทำให้วิสัยทัศน์ AI ของคุณเป็นจริงได้อย่างง่ายดายโดยใช้แพลตฟอร์มล้ำสมัยและแอป Ultralytics ที่ใช้งานง่ายของเรา เริ่มการเดินทางของคุณ ฟรี ทันที!

มีส่วนช่วย
เราชอบข้อมูลของคุณ! Ultralytics YOLO จะเป็นไปไม่ได้หากไม่ได้รับความช่วยเหลือจากชุมชนของเรา โปรดดูคู่มือการมีส่วนร่วมของเราเพื่อเริ่มต้น และกรอกแบบสำรวจของเราเพื่อส่งข้อเสนอแนะเกี่ยวกับประสบการณ์ของคุณ ขอบคุณ ? ถึงผู้ร่วมให้ข้อมูลของเราทุกคน!

ใบอนุญาต
Ultralytics เสนอตัวเลือกสิทธิ์การใช้งานสองตัวเลือกเพื่อรองรับกรณีการใช้งานที่หลากหลาย:
ใบอนุญาต AGPL-3.0 : ใบอนุญาตโอเพ่นซอร์สที่ได้รับการรับรองจาก OSI นี้เหมาะสำหรับนักเรียนและผู้ที่สนใจ โดยส่งเสริมการทำงานร่วมกันแบบเปิดกว้างและการแบ่งปันความรู้ ดูไฟล์ใบอนุญาตสำหรับรายละเอียดเพิ่มเติม
สิทธิ์การใช้งานระดับองค์กร : ออกแบบมาเพื่อการใช้งานเชิงพาณิชย์ สิทธิ์การใช้งานนี้อนุญาตให้รวมซอฟต์แวร์ Ultralytics และโมเดล AI เข้ากับสินค้าและบริการเชิงพาณิชย์ได้อย่างราบรื่น โดยข้ามข้อกำหนดโอเพ่นซอร์สของ AGPL-3.0 หากสถานการณ์ของคุณเกี่ยวข้องกับการฝังโซลูชันของเราในข้อเสนอเชิงพาณิชย์ โปรดติดต่อผ่าน Ultralytics Licensing
ติดต่อ
สำหรับรายงานข้อผิดพลาดของ Ultralytics และคำขอคุณสมบัติ โปรดไปที่ปัญหา GitHub ร่วมเป็นสมาชิกของ Ultralytics Discord, Reddit หรือฟอรัมเพื่อถามคำถาม แบ่งปันโปรเจ็กต์ เรียนรู้การสนทนา หรือขอความช่วยเหลือในทุกสิ่งของ Ultralytics!
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()





