3DObjectTracking
1.0.0
การติดตามวัตถุและโครงสร้างจลนศาสตร์ในพื้นที่ 3 มิติ ตลอดจนการกำหนดท่าทางและการกำหนดค่าถือเป็นงานสำคัญในการมองเห็นของคอมพิวเตอร์ การประยุกต์ใช้งานมีตั้งแต่ความเป็นจริงเสริมไปจนถึงการรับรู้ของหุ่นยนต์ เมื่อพิจารณาจากกรอบภาพที่ต่อเนื่องกัน รวมถึงตาข่าย 3 มิติและข้อมูลจลนศาสตร์ เป้าหมายคือการประมาณการหมุนและการแปลของวัตถุทั้งหมดที่สัมพันธ์กับกล้องอย่างแม่นยำ ในขณะที่ปัญหาได้รับการศึกษาอย่างละเอียด ความท้าทายหลายประการ เช่น การบดบังบางส่วน การเปลี่ยนแปลงรูปลักษณ์ ภาพเบลอจากการเคลื่อนไหว ความยุ่งเหยิงของพื้นหลัง ความคลุมเครือของวัตถุ และข้อกำหนดแบบเรียลไทม์
ในพื้นที่เก็บข้อมูลนี้ เราจะเผยแพร่อัลกอริทึมและโค้ดของการวิจัยที่กำลังดำเนินอยู่เกี่ยวกับการติดตามวัตถุ 3 มิติอย่างต่อเนื่อง โฟลเดอร์สำหรับอัลกอริธึมต่างๆ มีทุกสิ่งที่จำเป็นในการสร้างผลลัพธ์ที่นำเสนอในเอกสารของเรา โปรดทราบว่ารหัสสำหรับรายงานใหม่แต่ละฉบับยังรวมไปถึงเวอร์ชันที่อัปเดตของงานก่อนหน้าด้วย หากคุณต้องการใช้ตัวติดตามของเราในโปรเจ็กต์หรือแอปพลิเคชันของคุณเอง โปรดใช้โค้ดจากการเผยแพร่ล่าสุด ปัจจุบันโค้ดเวอร์ชันล่าสุดของเราสามารถพบได้ในโฟลเดอร์ M3T .

กรอบงานการติดตามแบบหลายตัว - จากวัตถุแข็งไปจนถึงโครงสร้างจลนศาสตร์

การผสมผสานรูปลักษณ์และเรขาคณิตสำหรับการติดตามวัตถุ 6DoF แบบหลายรูปแบบ
การนำเสนอ CVPR 2022

เรขาคณิตที่สอดคล้องกันซ้ำ
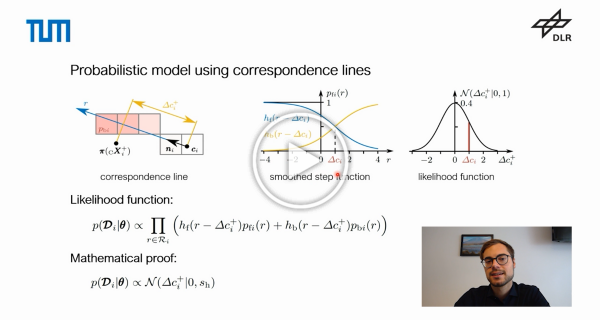
การนำเสนอแบบปากเปล่า ACCV 2020
วิธีการแบบ Sparse Gaussian เพื่อการติดตามวัตถุ 6DoF ตามภูมิภาค
วิธีการแบบ Sparse Gaussian เพื่อการติดตามวัตถุ 6DoF ตามภูมิภาค


