tacto
1.0.0
![]()
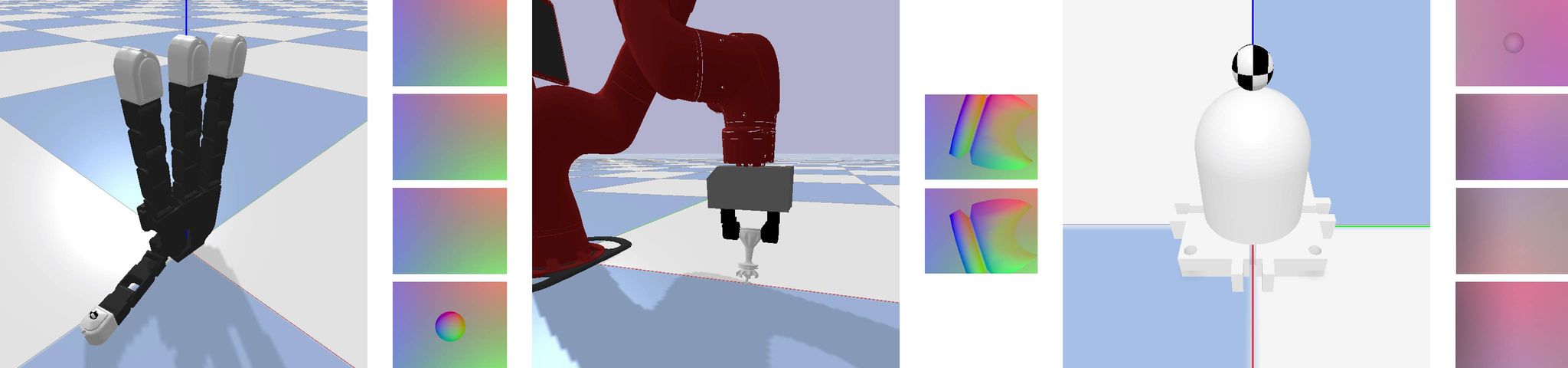
แพ็คเกจนี้มีเครื่องจำลองสำหรับเซ็นเซอร์สัมผัสตามการมองเห็น เช่น DIGIT มีโมเดลสำหรับการทำงานร่วมกับ PyBullet รวมถึงตัวเรนเดอร์การอ่านค่าแบบสัมผัส สำหรับข้อมูลเพิ่มเติม โปรดดูเอกสารที่เกี่ยวข้อง TACTO: เครื่องจำลองที่รวดเร็ว ยืดหยุ่น และโอเพ่นซอร์สสำหรับเซ็นเซอร์สัมผัสด้วยการมองเห็นที่มีความละเอียดสูง
หมายเหตุ: เครื่องจำลองไม่ได้มีไว้เพื่อให้ไดนามิกที่ถูกต้องทางกายภาพของการสัมผัส (เช่น การเสียรูป การเสียดสี) แต่อาศัยกลไกทางฟิสิกส์ที่มีอยู่
สำหรับข้อมูลอัปเดตและการสนทนา โปรดเข้าร่วมช่อง #TACTO ที่ชุมชน www.touch-sensing.org
วิธีการติดตั้งที่ต้องการคือผ่าน PyPi:
pip install tactoหรือคุณสามารถโคลนที่เก็บด้วยตนเองและติดตั้งแพ็คเกจโดยใช้:
git clone https://github.com/facebookresearch/tacto.git
cd tacto
pip install -e . แพ็คเกจนี้ประกอบด้วยส่วนประกอบหลายอย่าง:
จำเป็นต้องมีแพ็คเกจเพิ่มเติม (ไฟฉาย, ยิม, pybulletX) เพื่อรันตัวอย่างต่อไปนี้ คุณสามารถติดตั้งได้โดย pip install -r requirements/examples.txt
สำหรับตัวอย่างพื้นฐานเกี่ยวกับวิธีใช้ TACTO ร่วมกับ PyBullet ให้ดูที่ [TBD]
สำหรับตัวอย่างวิธีใช้เพียงเอ็นจิ้นการเรนเดอร์ ให้ดูที่ examples/demo_render.py
สำหรับตัวอย่างขั้นสูงของวิธีใช้โปรแกรมจำลองกับ PyBullet ให้ดูที่โฟลเดอร์ตัวอย่าง
หมายเหตุ: ตัวเรนเดอร์จำเป็นต้องมีหน้าจอ สำหรับการเรนเดอร์แบบไม่มีหัว ให้ใช้โหมด "EGL" พร้อม GPU และไดรเวอร์ CUDA หรือ "OSMESA" พร้อม CPU ดู PyRender สำหรับรายละเอียดเพิ่มเติม
นอกจากนี้ ให้ติดตั้ง PyOpenGL เวอร์ชันแพตช์ผ่านทาง
pip install git+https://github.com/mmatl/pyopengl.git@76d1261adee2d3fd99b418e75b0416bb7d2865e6
จากนั้นคุณสามารถระบุกลไกที่จะใช้สำหรับการเรนเดอร์แบบไม่มีหัวได้ เช่น
import os
os.environ["PYOPENGL_PLATFORM"] = "osmesa" # osmesa cpu rendering
เราแนะนำให้ทำการทดลองบน Ubuntu .
สำหรับ macOS มีปัญหาด้านการมองเห็นระหว่าง pybullet.GUI และ pyrender อย่างที่เราทราบ โปรดแจ้งให้เราทราบหากสามารถแก้ไขได้ และเราจะแบ่งปันข้อมูลที่ repo!
โครงการนี้ได้รับอนุญาตภายใต้ใบอนุญาต MIT ดังที่พบในไฟล์ใบอนุญาต
หากคุณใช้โครงการนี้ในการวิจัยของคุณ โปรดอ้างอิง:
@Article { Wang2022TACTO ,
author = { Wang, Shaoxiong and Lambeta, Mike and Chou, Po-Wei and Calandra, Roberto } ,
title = { {TACTO}: A Fast, Flexible, and Open-source Simulator for High-resolution Vision-based Tactile Sensors } ,
journal = { IEEE Robotics and Automation Letters (RA-L) } ,
year = { 2022 } ,
volume = { 7 } ,
number = { 2 } ,
pages = { 3930--3937 } ,
issn = { 2377-3766 } ,
doi = { 10.1109/LRA.2022.3146945 } ,
url = { https://arxiv.org/abs/2012.08456 } ,
}

