FREA
1.0.0
 |  |
2024-09-05 ข่าวน่ารู้! FREA ได้รับการยอมรับจาก CoRL 2024 สำหรับ การนำเสนอแบบปากเปล่า ??!2024-08-10 สำรวจหน้าโครงการของเรา อยู่ที่นี่แล้ว!2024-08-10 รหัสออกแล้ว!2024-06-05 เอกสารของเรามีอยู่ใน Arxiv?!พื้นที่เก็บข้อมูลนี้มีการนำเอกสารไปใช้
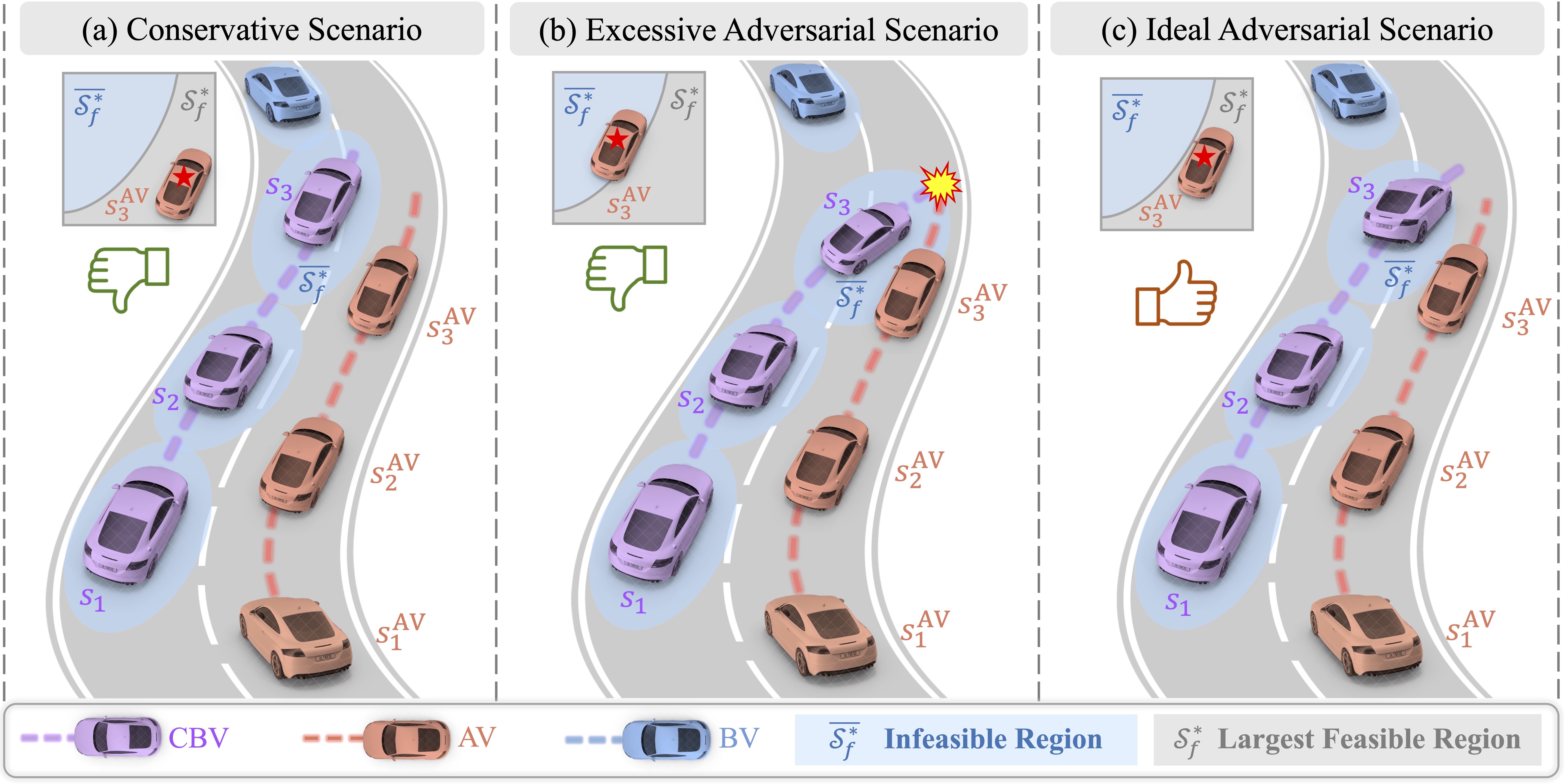
FREA: การสร้างสถานการณ์ที่มีความสำคัญด้านความปลอดภัยโดยมีแนวทางที่เป็นไปได้พร้อมความขัดแย้งที่สมเหตุสมผล
คีย์หยู เฉิน 1 , หยูเหิง เล่ย 2 , ห่าวเฉิง 1 , ห่าวหราน วู 1 , เหวินเชา ซุน 1 , ซีฟา เจิ้ง 1
1 คณะวิชายานพาหนะและการเคลื่อนที่ มหาวิทยาลัยชิงหัว 2 มหาวิทยาลัยฮ่องกง
หากคุณพบว่างานของเรามีประโยชน์ โปรดให้ดาวเราด้วย ?!
- FREA รวมความเป็นไปได้ไว้เป็นแนวทางในการสร้างสถานการณ์ที่ขัดแย้งแต่เป็นไปได้และมีความสำคัญต่อความปลอดภัย
ระบบที่แนะนำ: Ubuntu 20.04 หรือ 22.04
ขั้นตอนที่ 1: ติดตั้ง Carla (แนะนำ 0.9.13)
ขั้นตอนที่ 2: ตั้งค่าสภาพแวดล้อม conda
conda create -n frea python=3.8
conda activate freaขั้นตอนที่ 3: โคลน repo git นี้ในโฟลเดอร์ที่เหมาะสม
git clone [email protected]:CurryChen77/FREA.gitขั้นตอนที่ 4: เข้าสู่โฟลเดอร์รูท repo และติดตั้งแพ็คเกจ:
cd FREA
pip install -r requirements.txt
pip install -e . # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Launch in another terminal
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_train.yaml --mode collect_feasibility_data # Merge data
python frea/feasibility/unify_offline_data.py หากต้องการใช้ชุดข้อมูลออฟไลน์ในการดาวน์โหลดกระดาษของเราจากที่นี่ ให้ใส่ข้อมูลเหล่านั้นลงในโฟลเดอร์ feasibility
# Train optimal feasible value function of AV
python train_feasibility.py # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg fppo_adv_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FPPO-RS
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg fppo_rs_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train PPO
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg ppo_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg ppo.yaml --scenario_cfg fppo_adv_train.yaml --mode train_agent # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg ppo.yaml --scenario_cfg standard_train.yaml --mode train_agent # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Evaluation FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode analysis # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Evaluation FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode renderตรวจสอบให้แน่ใจว่าการประเมินเสร็จสิ้นแล้ว และผลลัพธ์ถูกบันทึกไว้ในโฟลเดอร์
# Process the recorded data
python eval_analysis/process_data/process_all_data.py
# Plot the evaluation result
python eval_analysis/plot_data/plot_evaluation_result.py # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Set world spectator
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_eval.yaml --mode eval -sp # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Visualize AV route
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_eval.yaml --mode eval -viz_route # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Visualize BEV map
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode renderหากคุณพบว่าบทความของเรามีประโยชน์ กรุณาอ้างอิงถึงเราทาง:
@inproceedings{
chen2024frea,
title={{FREA}: Feasibility-Guided Generation of Safety-Critical Scenarios with Reasonable Adversariality},
author={Keyu Chen and Yuheng Lei and Hao Cheng and Haoran Wu and Wenchao Sun and Sifa Zheng},
booktitle={8th Annual Conference on Robot Learning},
year={2024},
url={https://openreview.net/forum?id=3bcujpPikC}
}
การใช้งานนี้อิงตามโค้ดจากที่เก็บหลายแห่ง เราขอขอบคุณผู้เขียนอย่างจริงใจสำหรับงานที่ยอดเยี่ยมของพวกเขา


