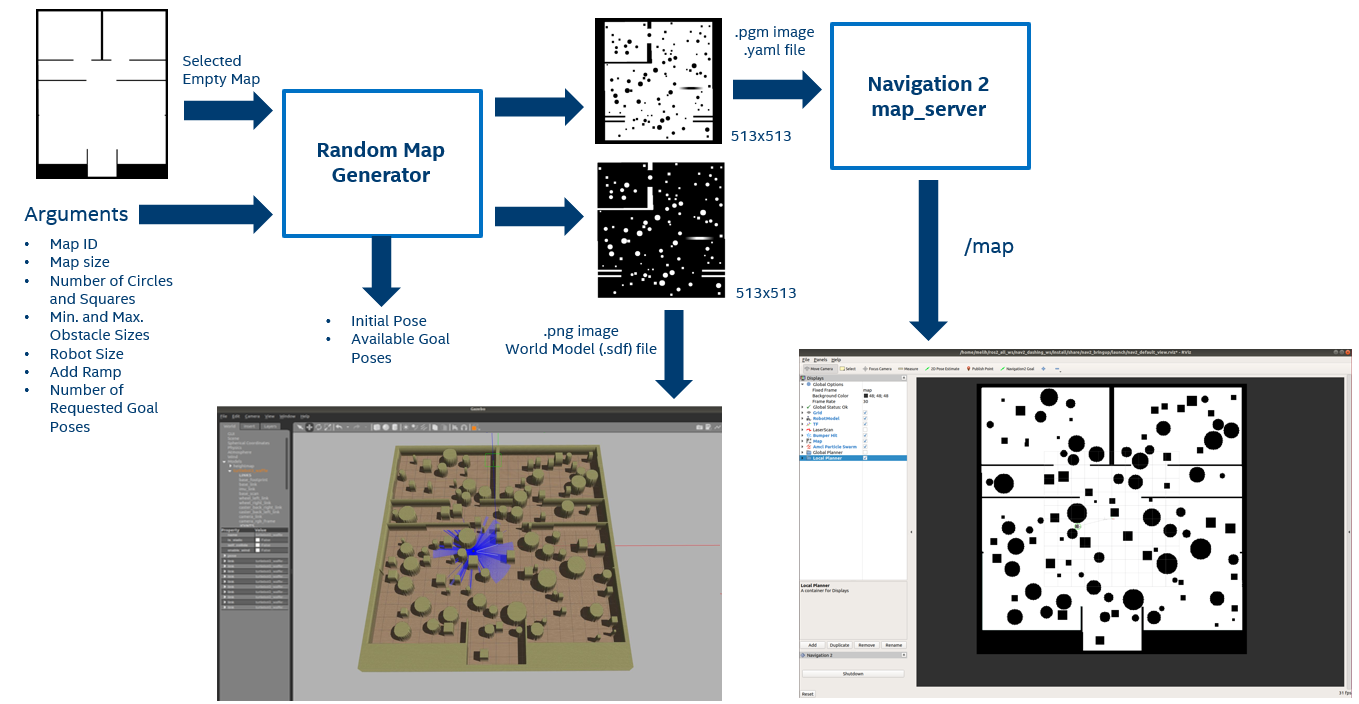
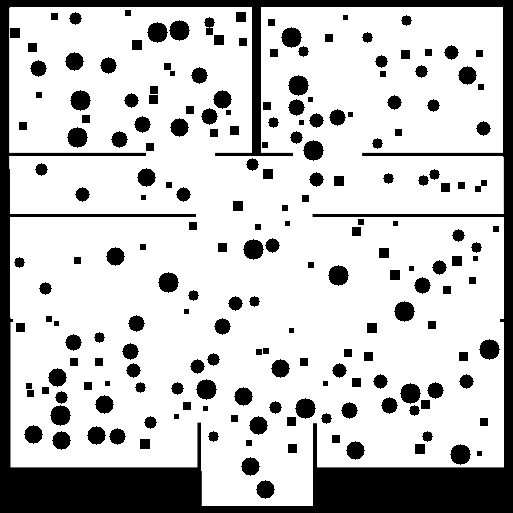
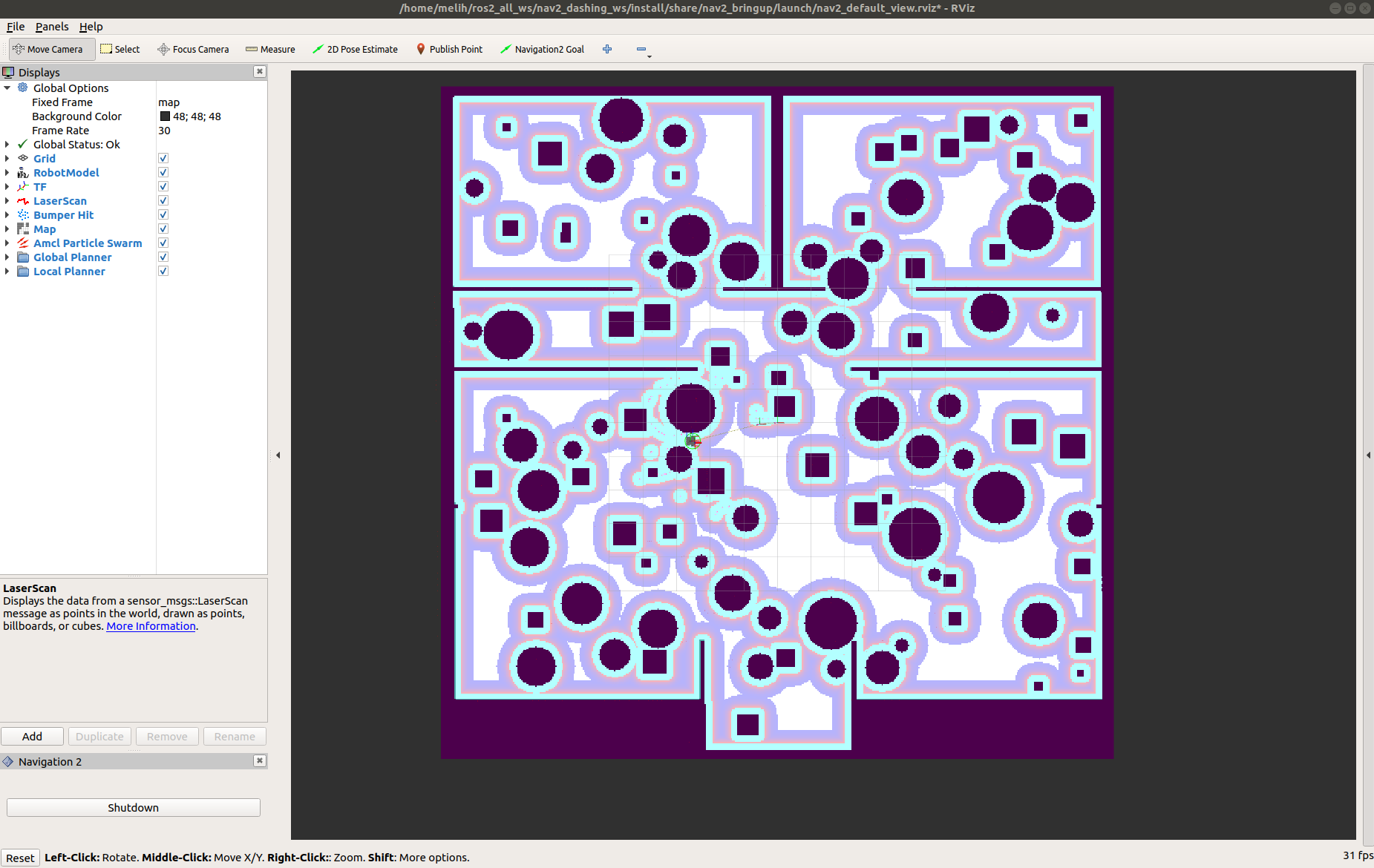
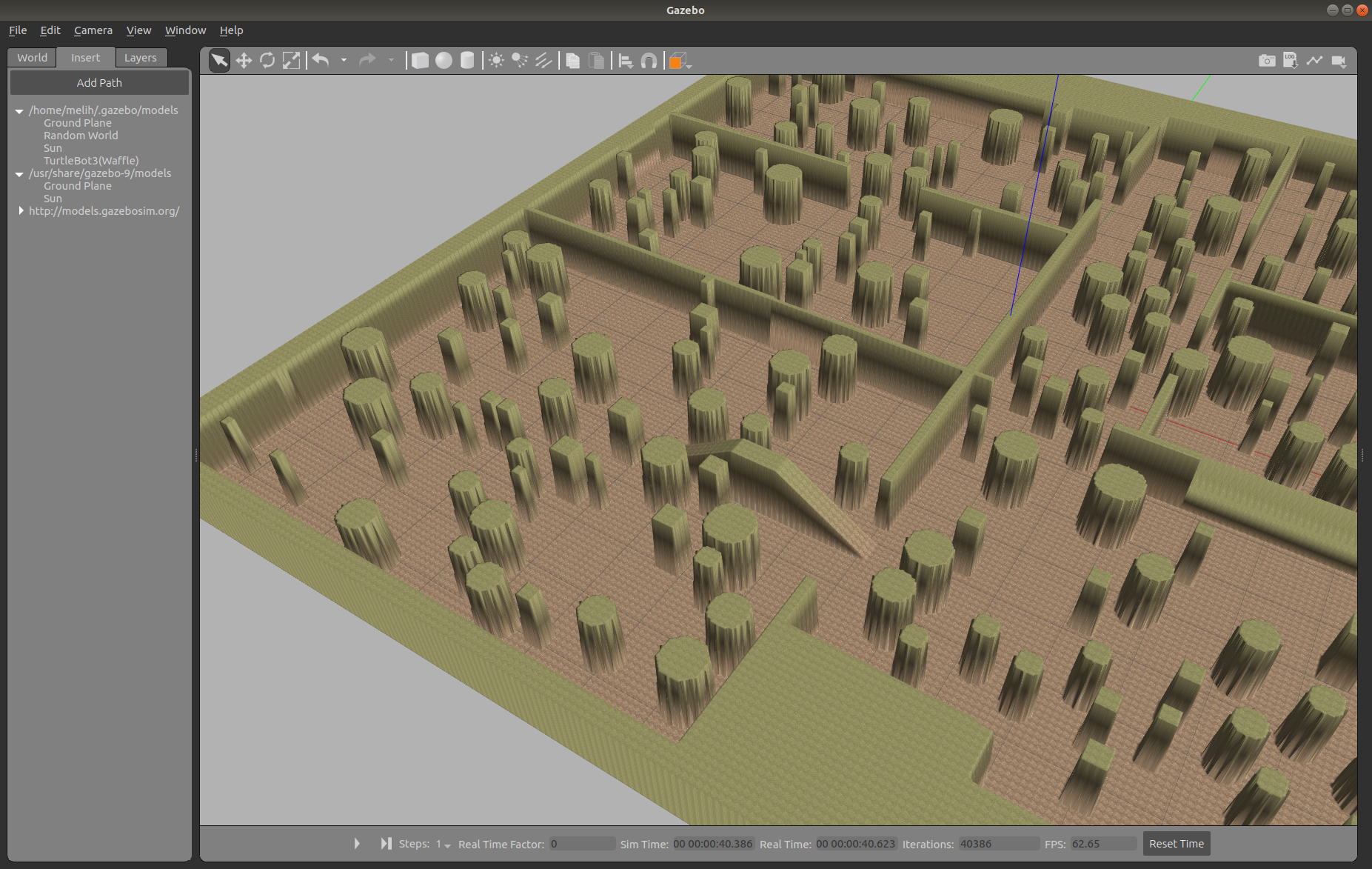
เครื่องมือนี้สร้างแผนที่และแบบจำลองโลกที่สร้างขึ้นแบบสุ่มซึ่งสามารถใช้งานได้โดย Navigation 2 และ Gazebo ใช้ส่วนเล็กๆ ของชุดข้อมูล HouseExpo เป็นชุดของรูปภาพเค้าโครงในอาคารที่ว่างเปล่า 2 มิติที่วาดด้วยมือ แผนที่ว่างจะอยู่ในไดเร็กทอรีแผนที่ เครื่องสร้างแผนที่แบบสุ่มจะสุ่มวางสิ่งกีดขวางในแผนที่ระดับสีเทา แผนที่จะต้องอยู่ในรูปแบบ .png ในปัจจุบัน รองรับการเพิ่มวงกลม สี่เหลี่ยม และทางลาด ผู้ใช้สามารถกำหนดขนาด รูปร่าง ประเภท และระยะห่างระหว่างสิ่งกีดขวางได้ แผนที่ความสูงของ Gazebo ใช้เพื่อสร้างแบบจำลองโลก Gazebo ของแผนที่ที่สร้างขึ้นแบบสุ่ม ไดเร็กทอรี Random_world สามารถคัดลอกได้ในไดเร็กทอรี .gazebo/model เพื่อใช้กับ Gazebo ขนาดแผนที่ที่สร้างขึ้นต้องเป็น 2^n+1 x 2^n+1 มิฉะนั้นจะไม่สามารถใช้งานกับ Gazebo ได้ ขนาดโมเดลโลกใน Gazebo ปรับขนาดเป็น 20 เมตร x 20 เมตร
sudo apt-get update
sudo apt-get upgrade
ติดตั้ง OpenCV
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install libopencv-dev
cd nav2_random_map_generator
make
หรือ
cd src
g++ circle.cpp main.cpp map.cpp obstacle.cpp ramp.cpp rmg.cpp square.cpp -o random-map `pkg-config --cflags --libs opencv`
./map_generator <Map Id> <Number_of_Circles> <Number_of_Squares> <Robot_Size (px*0.03898)> <Map_Size(x)> <Map_Size(y)> <Min_Circle_Radius> <Max_Circle_Radius> <Min Square_Size> <Max_Circle_Radius> <Add Ramp> <Show_Map>
ตัวอย่าง:
./map_generator 10 200 200 5 513 513 5 10 5 10 1 1
./map_generator h
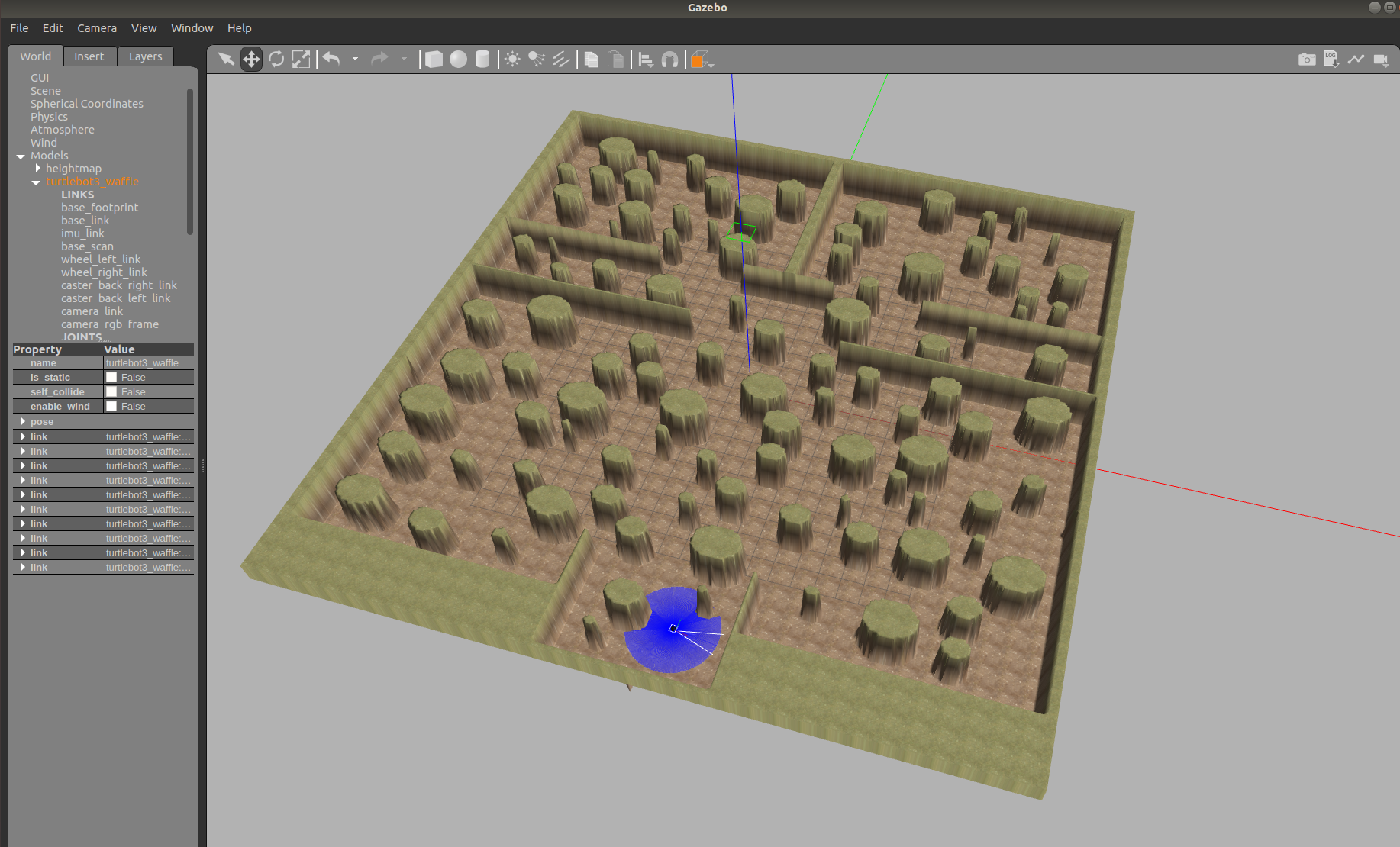
วิดีโอทดสอบ Ramdom Map TB3
วิดีโอทดสอบทางลาดแผนที่ Ramdom


