open3d_slam
1.0.0
open3d_slam เป็นไลบรารี C++ (cpp) สำหรับ SLAM พร้อมการรวม ROS
ติดต่อหลัก: เอโด เจลาวิช ([email protected])
ผู้แต่ง: เอโด เจลาวิช, จูเลียน นูเบิร์ต, มาร์โก ฮัตเตอร์
โปสเตอร์และบทคัดย่อ: ลิงค์
เอกสารประกอบ: ลิงค์
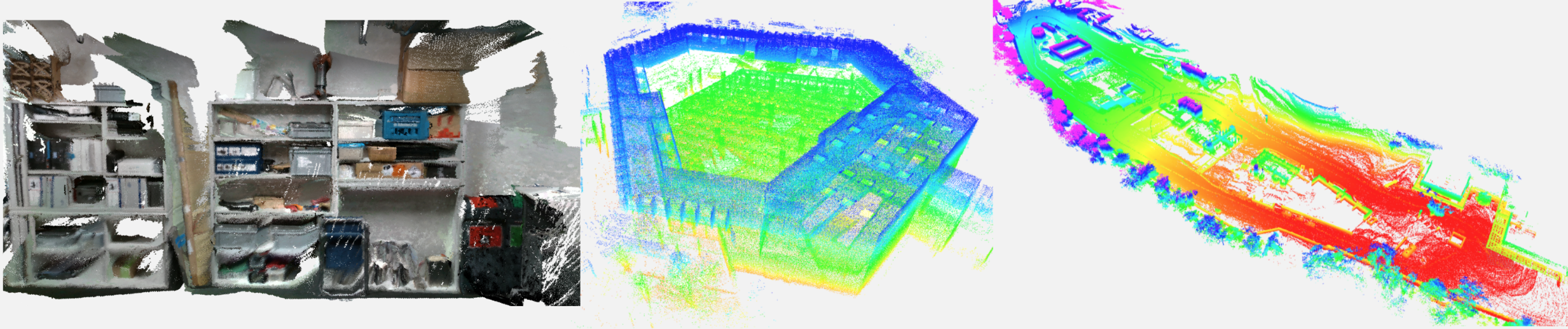
ข้อแตกต่างที่สำคัญระหว่าง open3d_slam และไลบรารี SLAM อื่นๆ ก็คือ open3d_slam ได้รับการออกแบบให้เรียบง่ายและใช้เพื่อการศึกษา ในความเป็นจริง open3d_slam ใช้เฉพาะอัลกอริธึมที่ได้รับการยอมรับอย่างดีในรูปแบบพื้นฐานเท่านั้น เราหวังว่าสิ่งนี้จะช่วยให้ผู้มาใหม่เข้าสู่สนามได้ง่ายขึ้น ใช้งานได้กับ pointclouds โดยไม่จำเป็นต้องป้อนข้อมูลเพิ่มเติม เช่น IMU Open3D_slam สามารถสร้างแผนที่ตั้งแต่เริ่มต้นหรือแปลเป็นภาษาท้องถิ่นในแผนที่ที่กำหนด แผนที่ที่กำหนดสามารถขยายได้ด้วยการวัดใหม่
เรายึดการใช้งาน Open3D ซึ่งเป็นไลบรารีที่ได้รับการดูแลอย่างดีและมีประสิทธิภาพสูงสำหรับการประมวลผลข้อมูล 3D
เอกสารประกอบและชุดข้อมูลตัวอย่างสามารถพบได้ที่นี่ เอกสาร open3d_slam
เราจัดเตรียม catkin wrapper สำหรับ Open3D เพื่อให้คุณสามารถใช้ Open3D ในโปรเจ็กต์ ROS ของคุณได้อย่างง่ายดาย ดูเอกสารประกอบใน open3d_catkin/README.md
หากคุณพบว่างานนี้มีประโยชน์หรือใช้เพื่อการวิจัยของคุณ โปรดพิจารณาอ้างอิงงานที่เกี่ยวข้อง:
@inproceedings{jelavic2022open3d,
title={Open3D SLAM: Point Cloud Based Mapping and Localization for Education},
author={Jelavic, Edo and Nubert, Julian and Hutter, Marco},
booktitle={Robotic Perception and Mapping: Emerging Techniques, ICRA 2022 Workshop},
pages={24},
year={2022},
organization={ETH Zurich, Robotic Systems Lab}
}


