ReturnVisitRobot
1.0.0
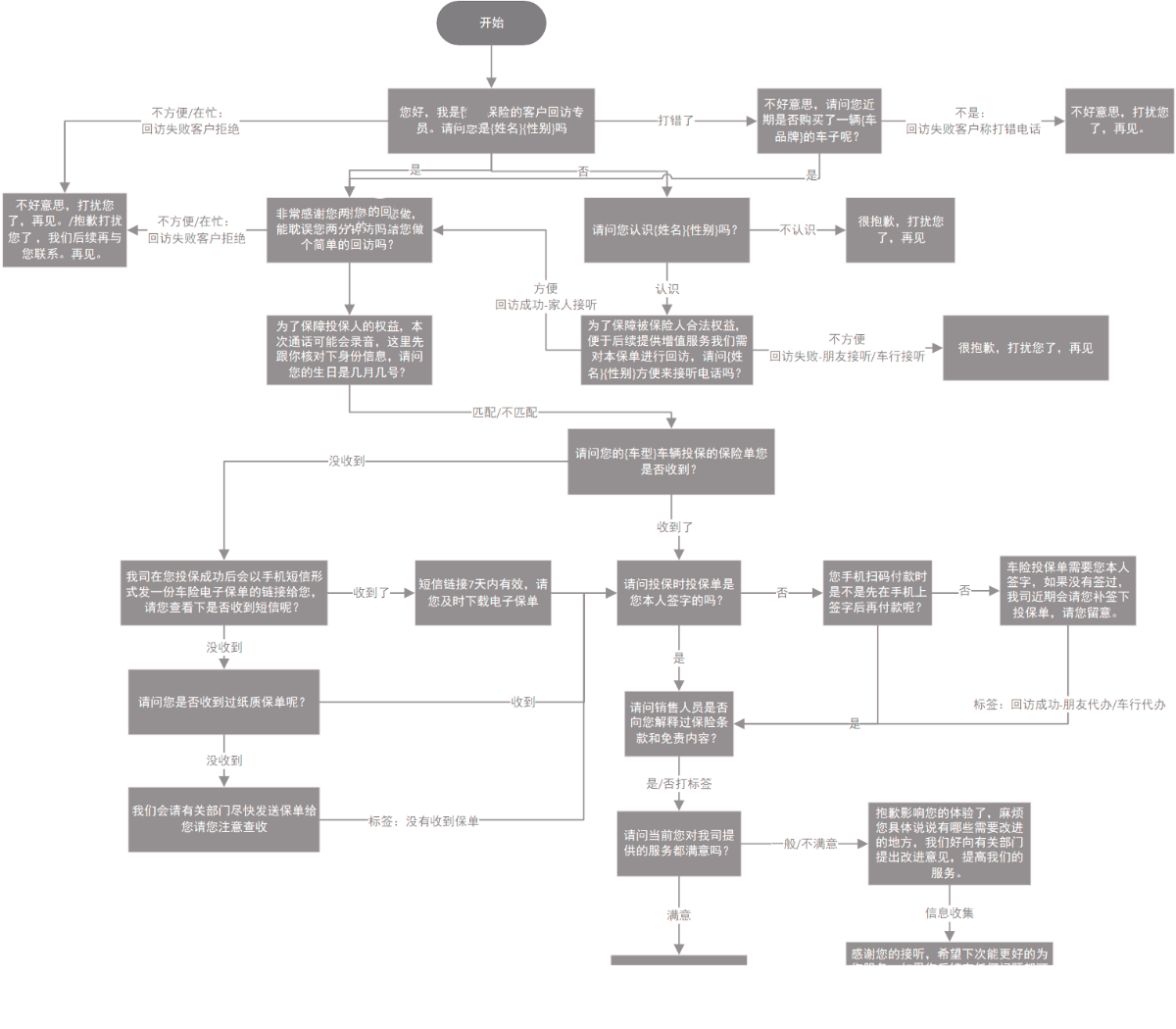
นี่คือโรบ็อตการโทรออกที่ใช้สำหรับการส่งคืนประกันเฉพาะส่วนโรบ็อตข้อความหลักเท่านั้นที่ยังคงอยู่ในโปรเจ็กต์นี้ กระบวนการทำงานหลักมีดังนี้:
โปรเจ็กต์นี้เขียนกลยุทธ์การตอบสนองบทสนทนาใหม่โดยใช้เครื่องสถานะจำกัดโดยอิงจาก rasa ซึ่งควรมีความสำคัญในการอ้างอิงสำหรับเพื่อนที่ต้องการสร้างโรบ็อตข้อความ
การกำหนดค่า คุณสามารถแก้ไขไปป์ไลน์ในไฟล์ confg.yml สำหรับวิธีการกำหนดค่าเฉพาะของไปป์ไลน์ โปรดดูที่เว็บไซต์อย่างเป็นทางการของ Rasa https://rasa.com/docs/rasa/model-configuration
ต่อไปนี้เป็นตัวอย่างการกำหนดค่าขององค์ประกอบที่กำหนดเองสองรายการ:
กลยุทธ์การตอบสนองบทสนทนาโดยใช้หน่วยความจำ
policies:
- name: policy.memoization.MemoizationPolicy
- name: TEDPolicy
max_history: 20
epochs: 15
batch_size: 50
- name: RulePolicy
core_fallback_threshold: 0.3
enable_fallback_prediction: True
core_fallback_action_name: "action_default_fallback"
หรือขึ้นอยู่กับเครื่องสถานะจำกัด (FSM)
policies:
- name: policy.fsm_policy.FsmPolicy
- name: TEDPolicy
max_history: 20
epochs: 15
batch_size: 50
- name: RulePolicy
core_fallback_threshold: 0.3
enable_fallback_prediction: True
core_fallback_action_name: "action_default_fallback"
รถไฟ
python main.py train
วิ่ง
#开启动作响应服务器,默认5055端口
python main.py run actions
#开启对话shell,如果使用pycharm注意勾选emulate terminal
python main.py shell
#第一句请输入内置意图:开始
Your input:开始
six~=1.16.0
rasa~=3.1.0
zlib~=1.2.12
tqdm~=4.64.0
pip install -r requirements.txt
rasa run -m xx.tar.gz(模型文件) -p 8787(端口号)


