awesome latex drawing
1.0.0
Awesome-latex-draw คือชุดตัวอย่างการวาดภาพเชิงวิชาการ มากกว่า 30 ตัวอย่างสำหรับการใช้ LaTeX รวมถึงเครือข่ายแบบเบย์ การพล็อตฟังก์ชัน แบบจำลองกราฟิก โครงสร้างเทนเซอร์ และเฟรมเวิร์กทางเทคนิค
LaTeX เป็นระบบเรียงพิมพ์คุณภาพสูงที่มีให้บริการในรูปแบบซอฟต์แวร์ฟรี ซึ่งใช้กันอย่างแพร่หลายในช่วงไม่กี่ปีที่ผ่านมาเพื่อสร้างกราฟิกเชิงวิชาการ ความนิยมนี้มาจากความสามารถในการจัดการภาพประกอบที่ซับซ้อนด้วยสัญลักษณ์พิเศษและสมการทางคณิตศาสตร์ ทำให้เหมาะสำหรับการวาดภาพกราฟิกที่มีรายละเอียดในการวิจัย
โปรเจ็กต์นี้แนะนำกราฟิกหลายตัวที่สร้างขึ้นโดยใช้ LaTeX พร้อมตัวอย่างที่ง่ายต่อการติดตามบน Overleaf ซึ่งเป็นแพลตฟอร์ม LaTeX ออนไลน์ยอดนิยม หากคุณสนใจ โปรดสำรวจและทำซ้ำตัวอย่างของเราบน Overleaf ที่ overleaf.com
pgfplots tikz สำหรับโครงสร้างเมทริกซ์ tikz-3dplot สำหรับโครงสร้างเทนเซอร์ กำลังมองหาตัวอย่างการวาดภาพ LaTeX ดีๆ อยู่หรือเปล่า? นี่คือกราฟิกมากกว่า 30+ รายการสำหรับแสดงวิธีการวาดใน LaTaX
LaTeX มีแพ็คเกจและเครื่องมือเฉพาะโดเมนที่มีประสิทธิภาพ เช่น tikz เพื่อเปิดใช้งานโมเดลกราฟิกที่ยืดหยุ่น เครือข่ายแบบเบย์เป็นตัวแทนของตระกูลแบบจำลองกราฟิกที่ประกอบด้วยตัวแปร (โดยปกติจะแสดงด้วยโหนด) และความสัมพันธ์แบบพึ่งพา (โดยปกติจะแสดงด้วยลูกศร) โชคดีที่ tikz มีไลบรารี่เฉพาะสำหรับการวาดเครือข่ายแบบเบย์และกราฟตัวประกอบโดยตรง
กล่องเครื่องมืออื่นใน Python: https://docs.daft-pgm.org/en/latest/
ตัวอย่างนี้มาจากเอกสารต่อไปนี้:
- Qibin Zhao, Liqing Zhang, Andrzej Cichocki (2015) การแยกตัวประกอบ CP แบบเบย์ของเทนเซอร์ที่ไม่สมบูรณ์พร้อมการกำหนดอันดับอัตโนมัติ ธุรกรรม IEEE เกี่ยวกับการวิเคราะห์รูปแบบและความฉลาดของเครื่องจักร, 37(9): 1751-1763
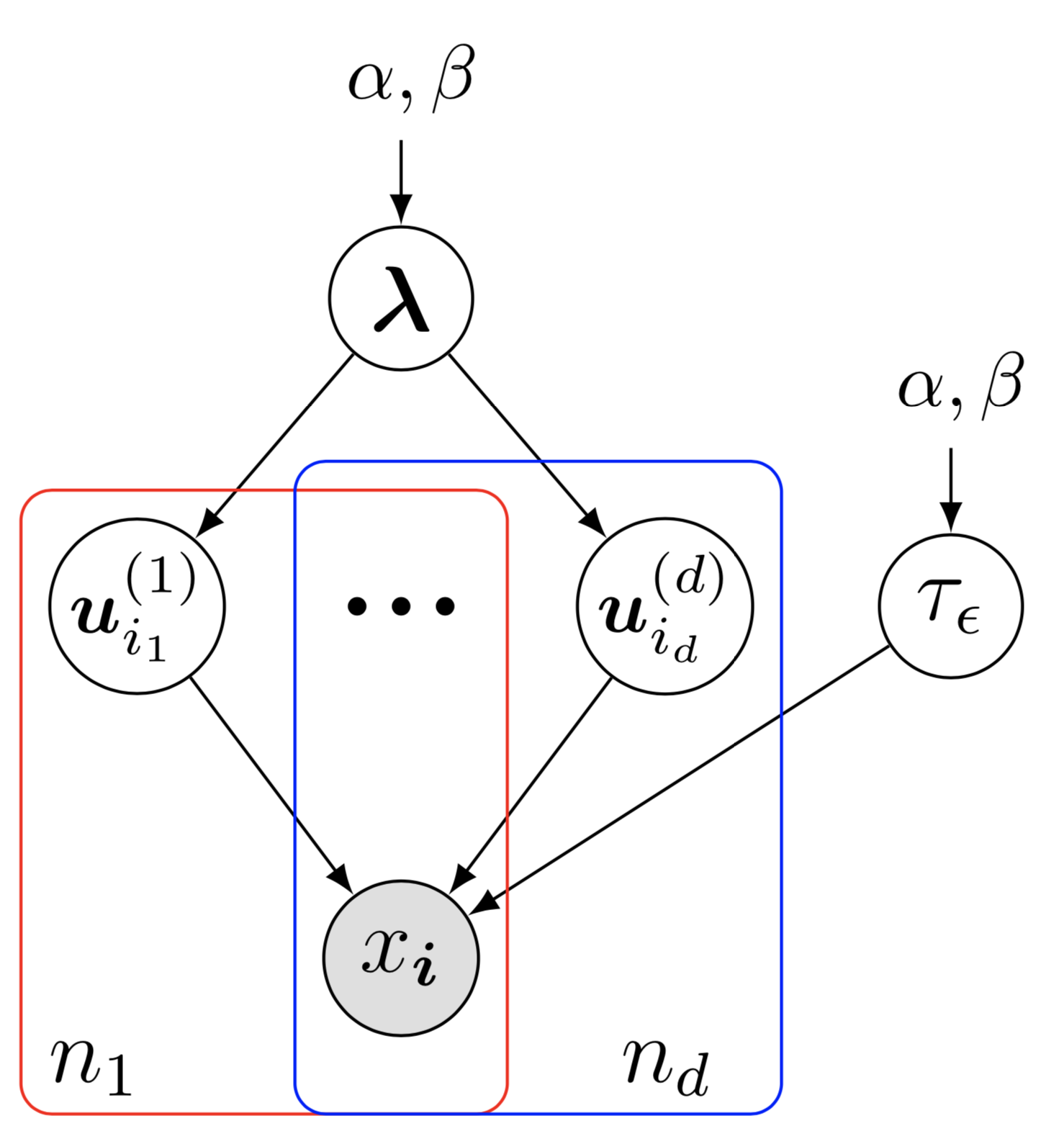 ซึ่งแสดงเครือข่ายแบบเบย์ของแบบจำลองการแยกตัวประกอบซีพีแบบเบย์ (BCPF) เพื่อวาดตัวอย่างเครือข่ายแบบเบย์นี้ มีข้อกำหนดเบื้องต้นบางประการที่ต้องปฏิบัติตาม:
ซึ่งแสดงเครือข่ายแบบเบย์ของแบบจำลองการแยกตัวประกอบซีพีแบบเบย์ (BCPF) เพื่อวาดตัวอย่างเครือข่ายแบบเบย์นี้ มีข้อกำหนดเบื้องต้นบางประการที่ต้องปฏิบัติตาม:preamble :documentclass เป็น standalone เช่น documentclass[border = 0.1cm]{standalone} ที่มีเส้นขอบ 0.1cmtikz เช่น usepackage{tikz} และใช้ไลบรารี tikz เช่น usetikzlibrary{bayesnet} ซึ่งเป็นเครื่องมือสำคัญสำหรับการวาดเครือข่ายแบบ Bayesian และกราฟปัจจัยกำกับtikz โดยใช้คำสั่ง tikzstyle{}usepackage{amsfonts, amsmath, amssymb}body :begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดnode เพื่อกำหนดโหนดและกล่องข้อความในเครือข่ายแบบเบย์path เพื่อกำหนดลูกศรในเครือข่ายแบบเบย์plate เพื่อกำหนดเพลตในเครือข่ายแบบเบย์กรุณาคลิกที่ภาพและตรวจสอบซอร์สโค้ด
ตัวอย่างนี้มาจากเอกสารต่อไปนี้:
ซินหยู่ เฉิน, จ้าวเฉิงเหอ, ลี่จุน ซุน (2019) วิธีการสลายตัวของเทนเซอร์แบบเบย์สำหรับการใส่ข้อมูลทราฟฟิกเชิงพื้นที่ การวิจัยการขนส่งส่วนที่ C: เทคโนโลยีเกิดใหม่, 98: 73-84
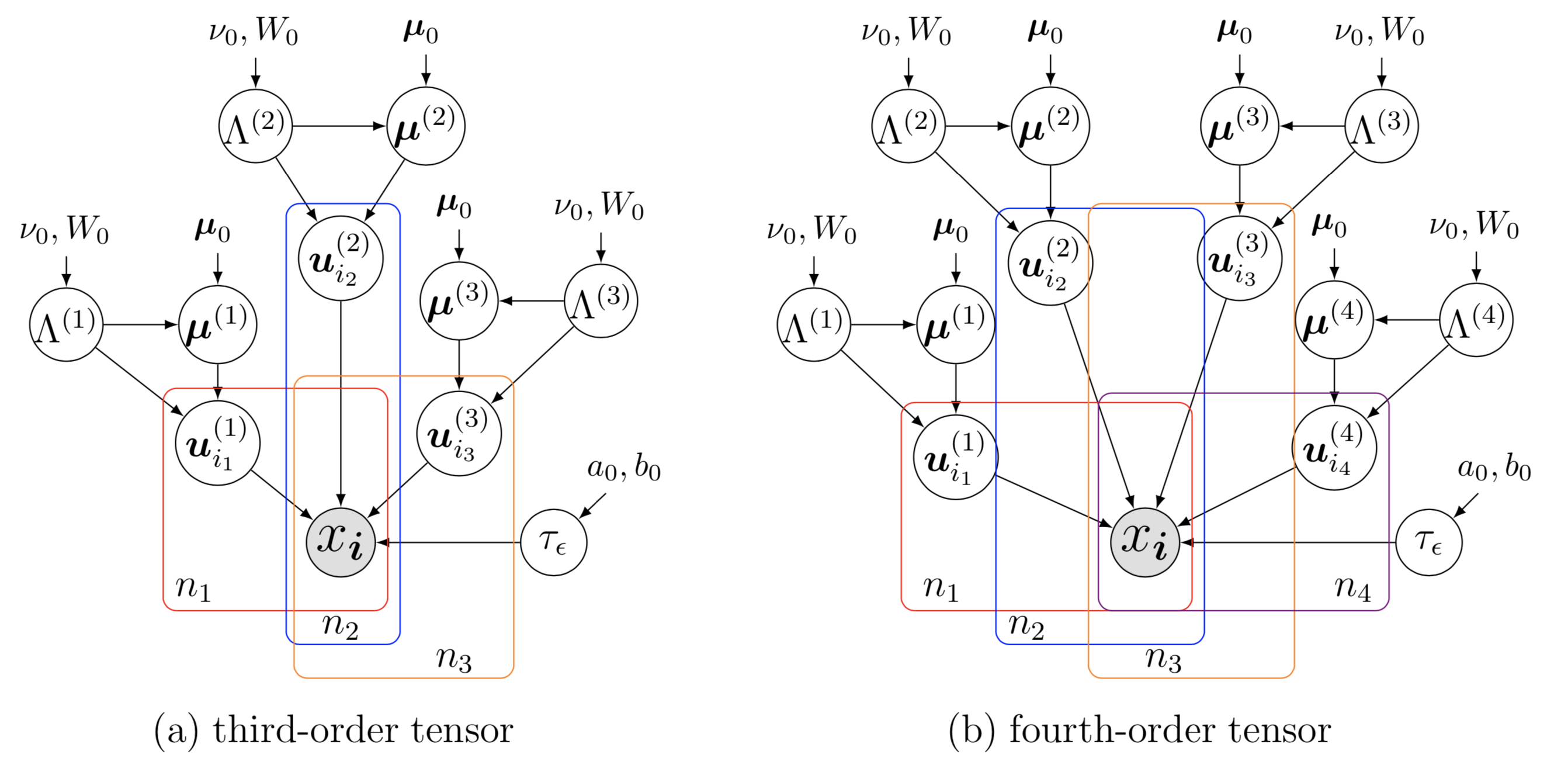
 ซึ่งแสดงเครือข่ายแบบเบย์ของแบบจำลองการแยกตัวประกอบ CP แบบเบย์เซียนเกาส์เซียน (BGCP) เพื่อวาดตัวอย่างเครือข่ายแบบเบย์นี้ มีข้อกำหนดเบื้องต้นบางประการที่ต้องปฏิบัติตาม:
ซึ่งแสดงเครือข่ายแบบเบย์ของแบบจำลองการแยกตัวประกอบ CP แบบเบย์เซียนเกาส์เซียน (BGCP) เพื่อวาดตัวอย่างเครือข่ายแบบเบย์นี้ มีข้อกำหนดเบื้องต้นบางประการที่ต้องปฏิบัติตาม:preamble :documentclass เป็น standalone เช่น documentclass[border = 0.1cm]{standalone} ที่มีเส้นขอบ 0.1cmtikz เช่น usepackage{tikz} และใช้ไลบรารี tikz เช่น usetikzlibrary{bayesnet} ซึ่งเป็นเครื่องมือสำคัญสำหรับการวาดเครือข่ายแบบ Bayesian และกราฟปัจจัยกำกับtikz โดยใช้คำสั่ง tikzstyle{}usepackage{amsmath, amsfonts, amssymb}body :begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดnode เพื่อกำหนดโหนดและกล่องข้อความในเครือข่ายแบบเบย์path เพื่อกำหนดลูกศรในเครือข่ายแบบเบย์plate เพื่อกำหนดเพลตในเครือข่ายแบบเบย์กรุณาคลิกที่ภาพและตรวจสอบซอร์สโค้ด หากคุณสนใจเครือข่าย Bayesian ดั้งเดิมของ BGCP ในบทความนี้ โปรดตรวจสอบที่ BGCP.tex
ตัวอย่างนี้มาจากเอกสารต่อไปนี้:
Xinyu Chen, Zhaocheng He, Yixian Chen, Yuhuan Lu, Jiawei Wang (2019) ไม่มีการใส่ข้อมูลการจราจรและการค้นพบรูปแบบด้วยแบบจำลองการแยกตัวประกอบเทนเซอร์แบบเบย์ การวิจัยการขนส่งส่วนที่ C: เทคโนโลยีเกิดใหม่, 104: 66-77
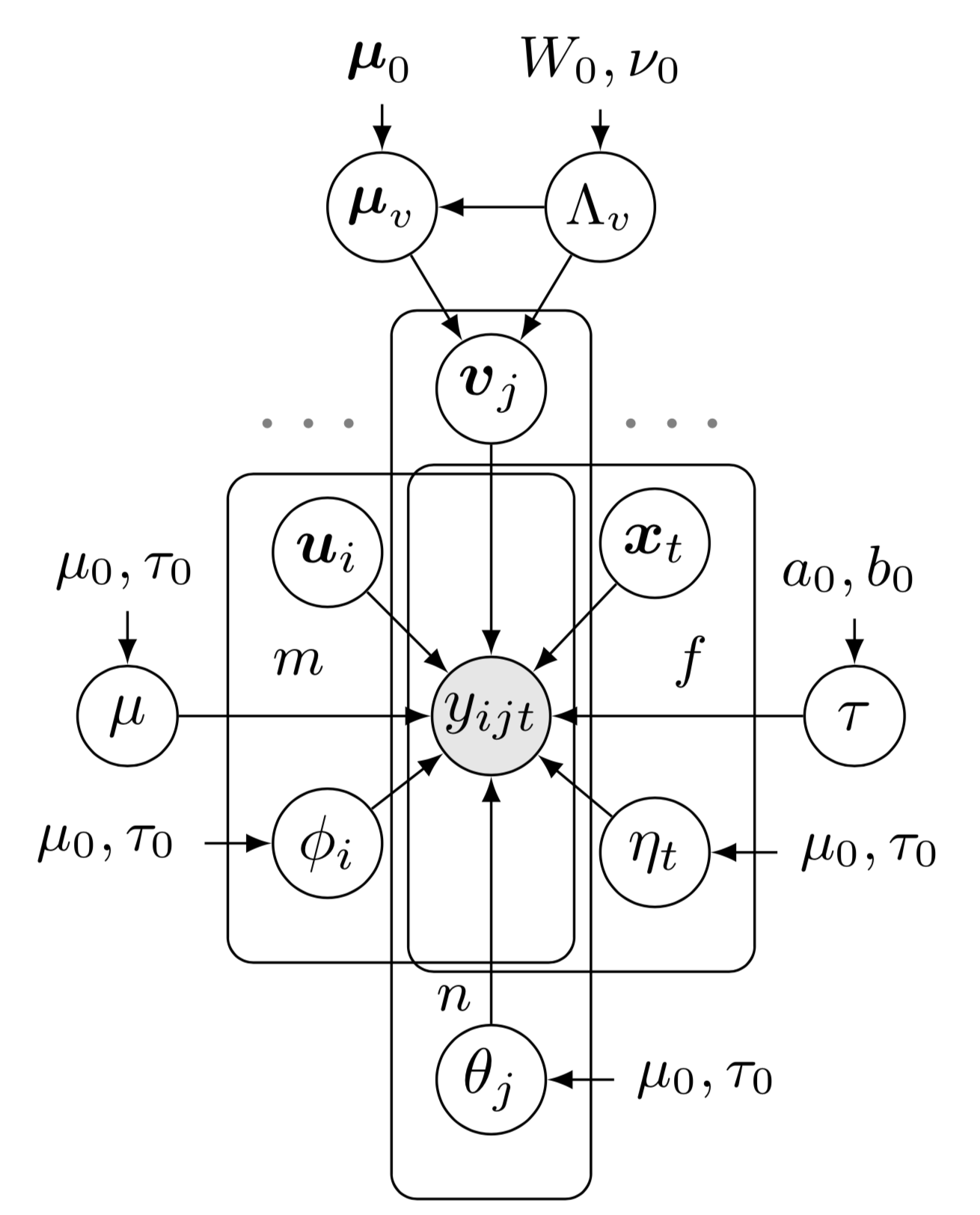 ซึ่งแสดงเครือข่ายแบบเบย์ของแบบจำลองการแยกตัวประกอบเทนเซอร์เสริมแบบเบย์ (BATF) เพื่อวาดตัวอย่างเครือข่ายแบบเบย์นี้ มีข้อกำหนดเบื้องต้นบางประการที่ต้องปฏิบัติตาม:
ซึ่งแสดงเครือข่ายแบบเบย์ของแบบจำลองการแยกตัวประกอบเทนเซอร์เสริมแบบเบย์ (BATF) เพื่อวาดตัวอย่างเครือข่ายแบบเบย์นี้ มีข้อกำหนดเบื้องต้นบางประการที่ต้องปฏิบัติตาม:preamble :documentclass เป็น standalone เช่น documentclass[border = 0.1cm]{standalone} ที่มีเส้นขอบ 0.1cmtikz เช่น usepackage{tikz} และใช้ไลบรารี tikz เช่น usetikzlibrary{bayesnet} ซึ่งเป็นเครื่องมือสำคัญสำหรับการวาดเครือข่ายแบบ Bayesian และกราฟปัจจัยกำกับtikz โดยใช้คำสั่ง tikzstyle{}usepackage{amsmath, amsfonts, amssymb}body :begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดnode เพื่อกำหนดโหนดและกล่องข้อความในเครือข่ายแบบเบย์path เพื่อกำหนดลูกศรในเครือข่ายแบบเบย์plate เพื่อกำหนดเพลตในเครือข่ายแบบเบย์กรุณาคลิกที่ภาพและตรวจสอบซอร์สโค้ด
ตัวอย่างนี้มาจากเอกสารต่อไปนี้:
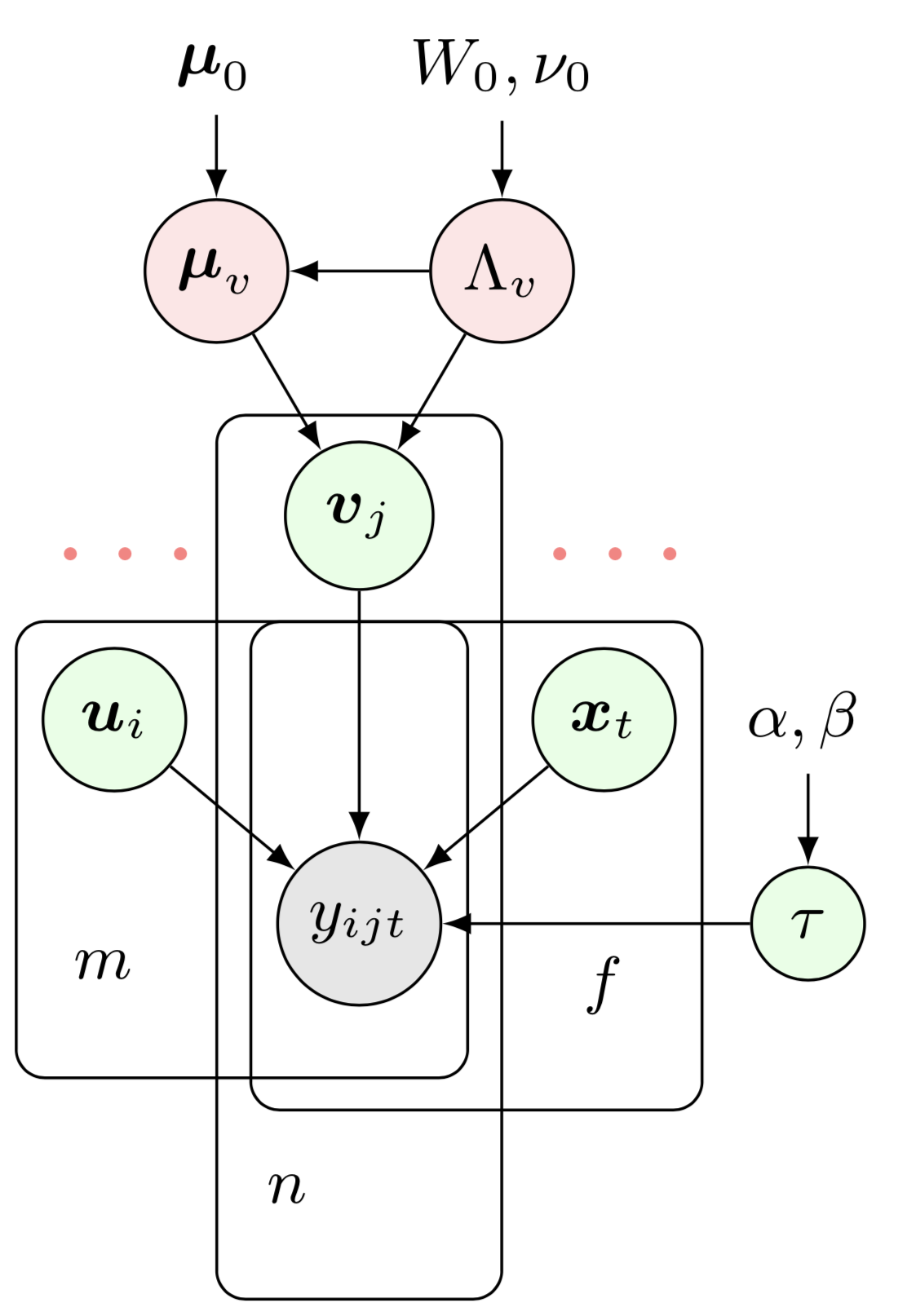
ซินหยู่ เฉิน, ลี่จุน ซุน (2021) การแยกตัวประกอบชั่วคราวแบบเบย์สำหรับการทำนายอนุกรมเวลาหลายมิติ ธุรกรรม IEEE เกี่ยวกับการวิเคราะห์รูปแบบและความฉลาดของเครื่องจักร, 44 (9): 4659-4673
 ซึ่งแสดงเครือข่ายแบบเบย์ของแบบจำลองการแยกตัวประกอบเมทริกซ์เชิงเวลาแบบเบย์ (BTMF) เพื่อวาดตัวอย่างเครือข่ายแบบเบย์นี้ มีข้อกำหนดเบื้องต้นบางประการที่ต้องปฏิบัติตาม:
ซึ่งแสดงเครือข่ายแบบเบย์ของแบบจำลองการแยกตัวประกอบเมทริกซ์เชิงเวลาแบบเบย์ (BTMF) เพื่อวาดตัวอย่างเครือข่ายแบบเบย์นี้ มีข้อกำหนดเบื้องต้นบางประการที่ต้องปฏิบัติตาม:preamble :documentclass เป็น standalone เช่น documentclass[border = 0.1cm]{standalone} ที่มีเส้นขอบ 0.1cmtikz เช่น usepackage{tikz} และใช้ไลบรารี tikz เช่น usetikzlibrary{bayesnet} ซึ่งเป็นเครื่องมือสำคัญสำหรับการวาดเครือข่ายแบบ Bayesian และกราฟปัจจัยกำกับtikz โดยใช้คำสั่ง tikzstyle{}usepackage{amsmath, amsfonts, amssymb}body :begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดnode เพื่อกำหนดโหนดและกล่องข้อความในเครือข่ายแบบเบย์path เพื่อกำหนดลูกศรในเครือข่ายแบบเบย์plate เพื่อกำหนดเพลตในเครือข่ายแบบเบย์กรุณาคลิกที่ภาพและตรวจสอบซอร์สโค้ด แทนที่จะใช้กระบวนการถดถอยอัตโนมัติเวกเตอร์หลายตัวแปรบนปัจจัยชั่วคราว เรายังสามารถใช้กระบวนการถดถอยอัตโนมัติแบบตัวแปรเดียวเพื่อสร้าง BTMF ขึ้นมาใหม่ได้ เครือข่าย Beyasian มีให้บริการที่ btmf_net.png คุณสามารถตรวจสอบซอร์สโค้ด btmf_net.tex ได้


ตัวอย่างทั้งสองนี้แสดงเมทริกซ์อนุกรมเวลาและเทนเซอร์ที่สังเกตได้บางส่วนตามลำดับ หากต้องการวาดทั้งสองตัวอย่าง เราสามารถทำตามขั้นตอนเหล่านี้:
รหัส preamble :
documentclass เป็นแบบ standalonetikz รหัส body :
begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดnode เพื่อกำหนดโหนดและกล่องข้อความในแบบจำลองกราฟิกpath เพื่อกำหนดลูกศรในโมเดลกราฟิก 

สองตัวอย่างนี้แสดงการทำนายอนุกรมเวลาเมื่อมีค่าที่หายไป หากต้องการวาดทั้งสองตัวอย่าง เราสามารถทำตามขั้นตอนเหล่านี้:
รหัส preamble :
documentclass เป็นแบบ standalonetikz รหัส body :
begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดnode เพื่อกำหนดโหนดและกล่องข้อความในแบบจำลองกราฟิกpath เพื่อกำหนดลูกศรในโมเดลกราฟิก 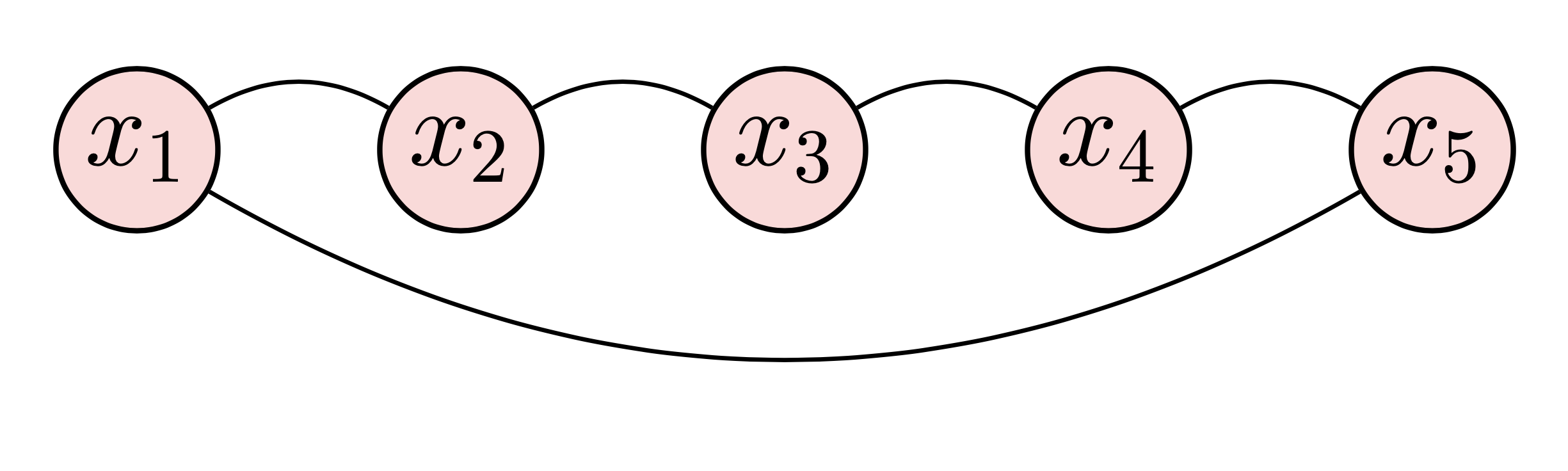
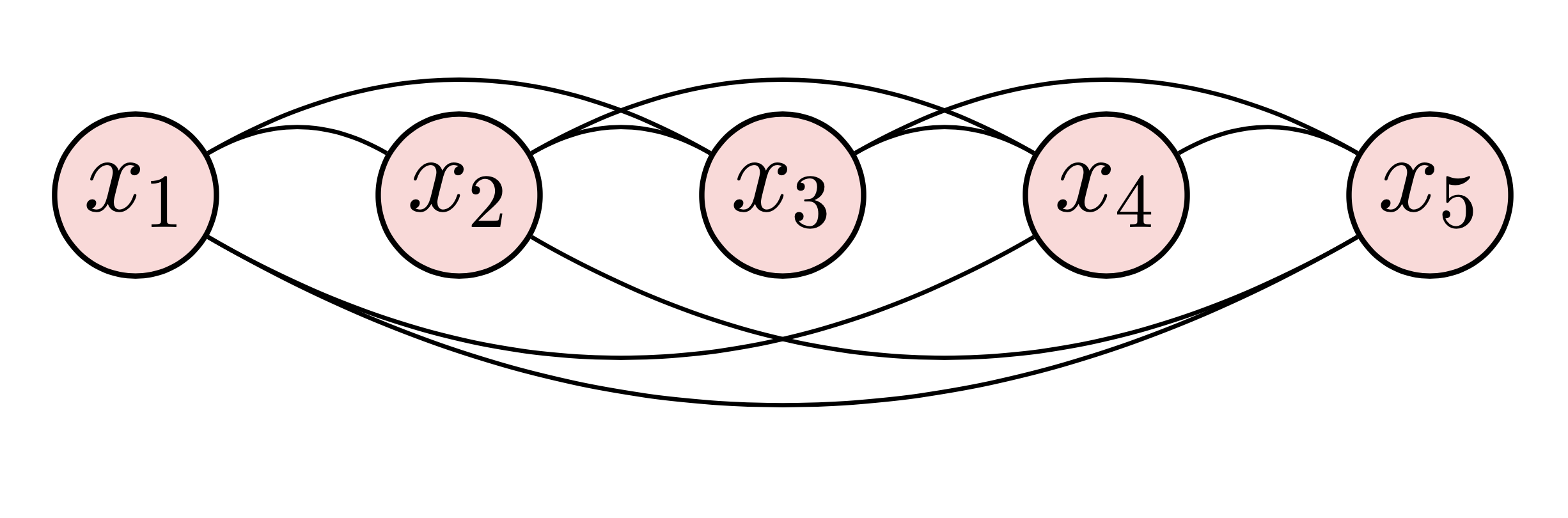
ตัวอย่างทั้งสองนี้แสดงกราฟแบบไม่มีทิศทางและกราฟวงกลมบนตัวอย่างข้อมูลเชิงสัมพันธ์ในระดับที่แน่นอน หากต้องการวาดทั้งสองตัวอย่าง เราสามารถทำตามขั้นตอนเหล่านี้:
รหัส preamble :
documentclass เป็นแบบ standalonetikz รหัส body :
begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดnode เพื่อกำหนดโหนดpath เพื่อกำหนดลูกศร 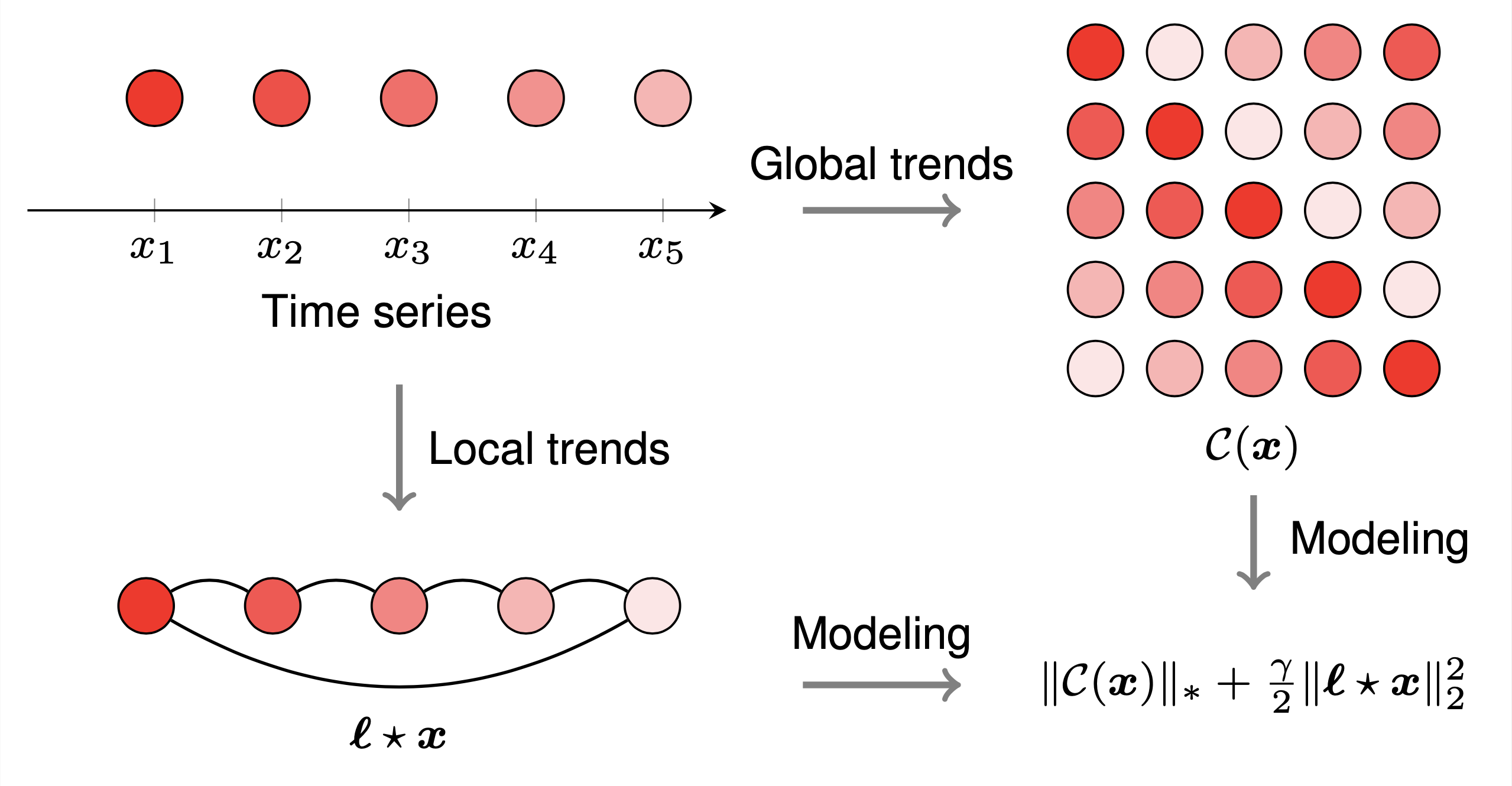
ตัวอย่างนี้มาจากเอกสารต่อไปนี้:
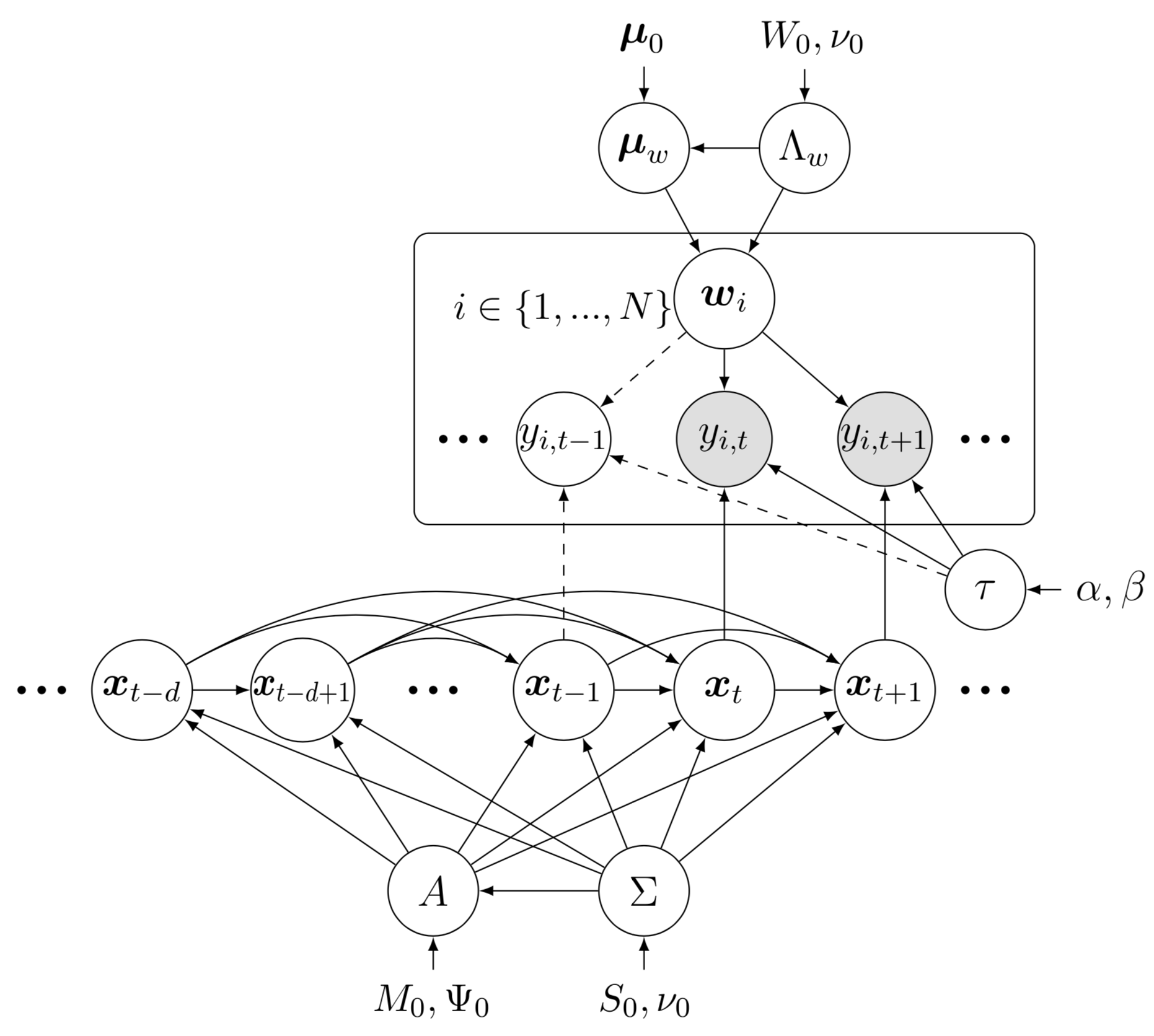
ซินหยู เฉิน, จ้านหง เฉิง, นิโคลัส โซเนียร์, ลี่จุน ซุน (2022) การแทนค่าแบบหมุนวนของ Laplacian สำหรับการใส่อนุกรมเวลาของการรับส่งข้อมูล arXiv พิมพ์ล่วงหน้า arXiv: 2212.01529
ซึ่งให้ภาพประกอบแบบกราฟิกของแบบจำลองการหมุนวนของ Laplacian สำหรับการใส่อนุกรมเวลา เพื่อวาดตัวอย่าง เราสามารถทำตามขั้นตอนเหล่านี้:
preamble :documentclass เป็นแบบ standalonetikzbody :begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดbegin{axis} end{axis} และ addplot เพื่อวาดพิกัดnode และ path เพื่อวาดโหนดและลูกศรpgfplots การวางแผนฟังก์ชัน 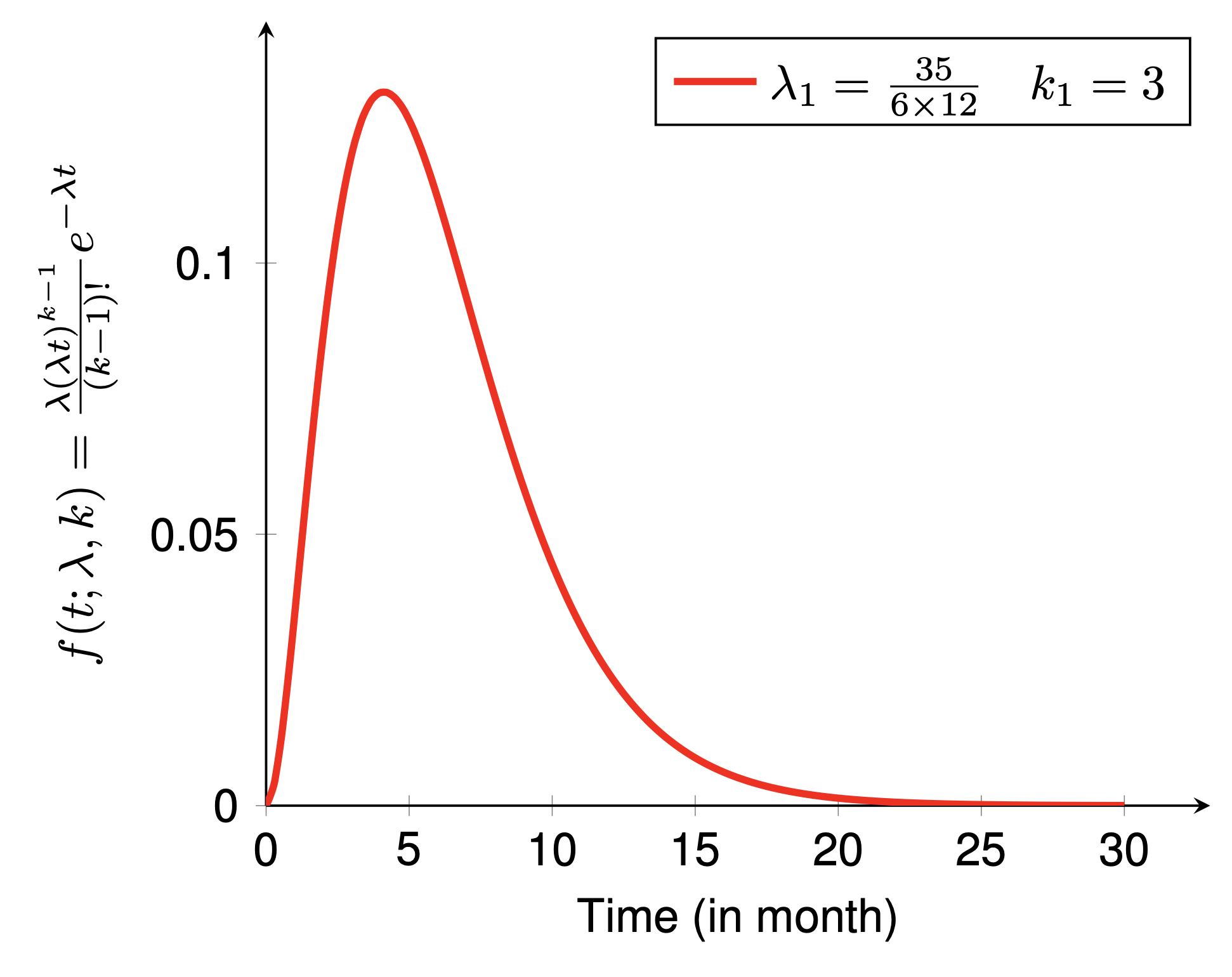
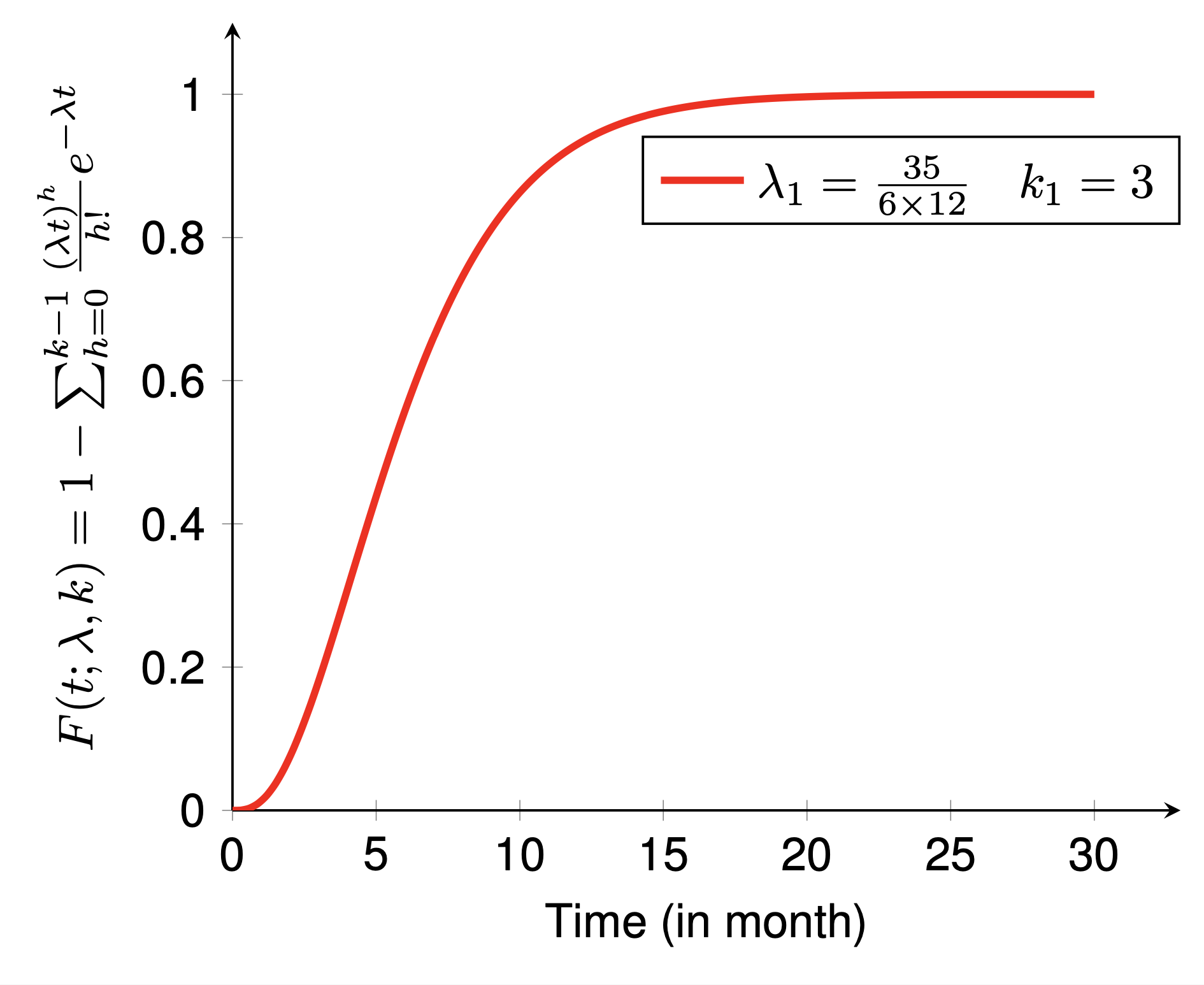
สองตัวอย่างนี้แสดงฟังก์ชันความหนาแน่นของความน่าจะเป็น (PDF) และฟังก์ชันความหนาแน่นสะสม (CDF) ของการแจกแจง Erlang ตามลำดับ หากต้องการวาดตัวอย่าง มีขั้นตอนให้ปฏิบัติตามดังนี้:
preamble :documentclass เป็นแบบ standalonepgfplotspgfplotsset{} ตามที่คุณต้องการbody :begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดbegin{axis} end{axis} เพื่อวาดฟังก์ชันaddplot เพื่อกำหนดฟังก์ชันสำหรับการวาดภาพ 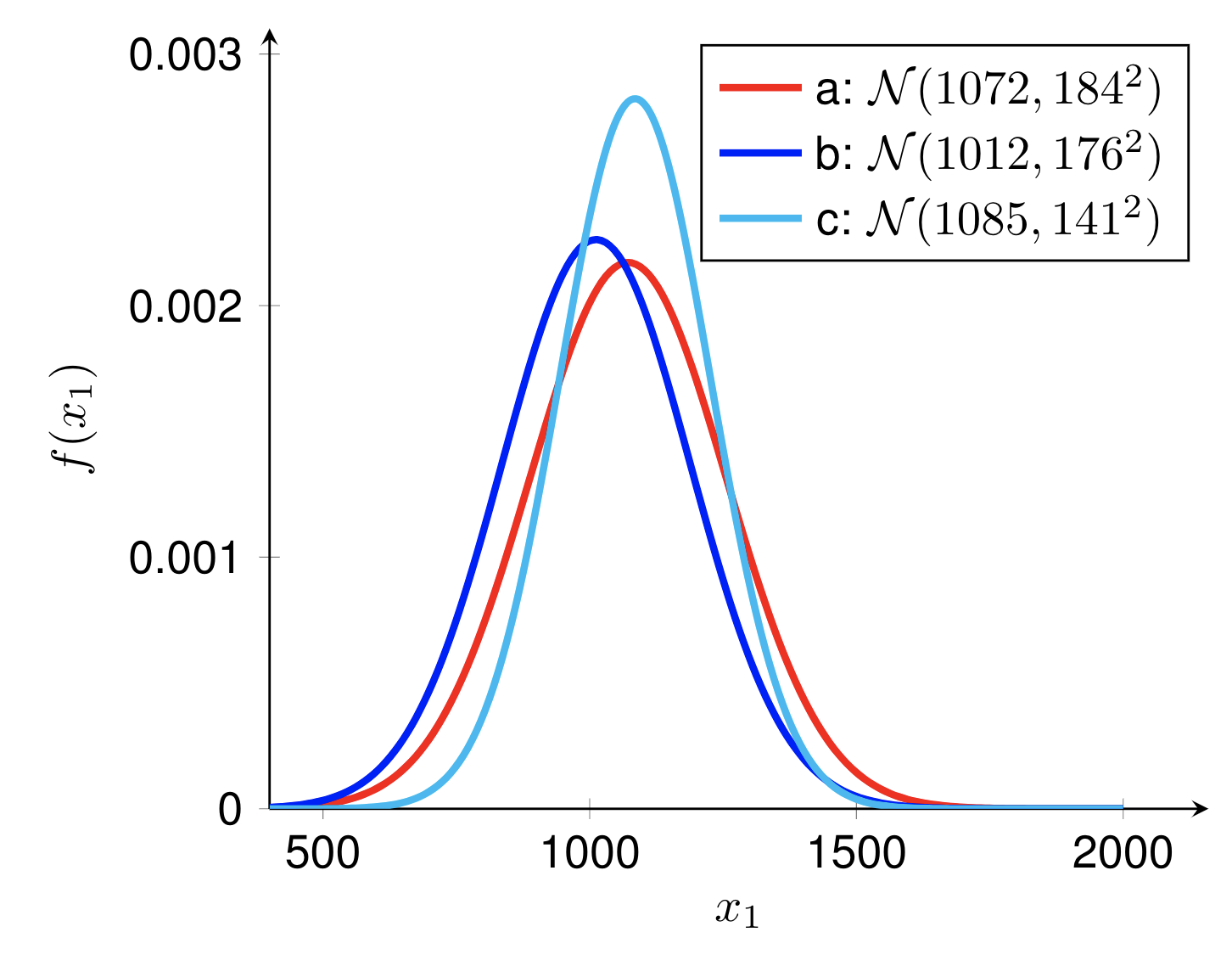
ตัวอย่างนี้แสดง PDF ของการแจกแจงแบบปกติด้วยวิธีการและความแปรปรวนที่แตกต่างกัน หากต้องการวาดตัวอย่างนี้ มีขั้นตอนที่ต้องปฏิบัติตามดังนี้:
preamble :documentclass เป็นแบบ standalonepgfplotspgfplotsset{} ตามที่คุณต้องการbody :pgfmathdeclarefunction เพื่อกำหนดฟังก์ชัน PDF ของการแจกแจงแบบปกติ (เกาส์เซียน)begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดbegin{axis} end{axis} เพื่อวาดฟังก์ชันaddplot เพื่อกำหนดฟังก์ชันสำหรับการวาดภาพ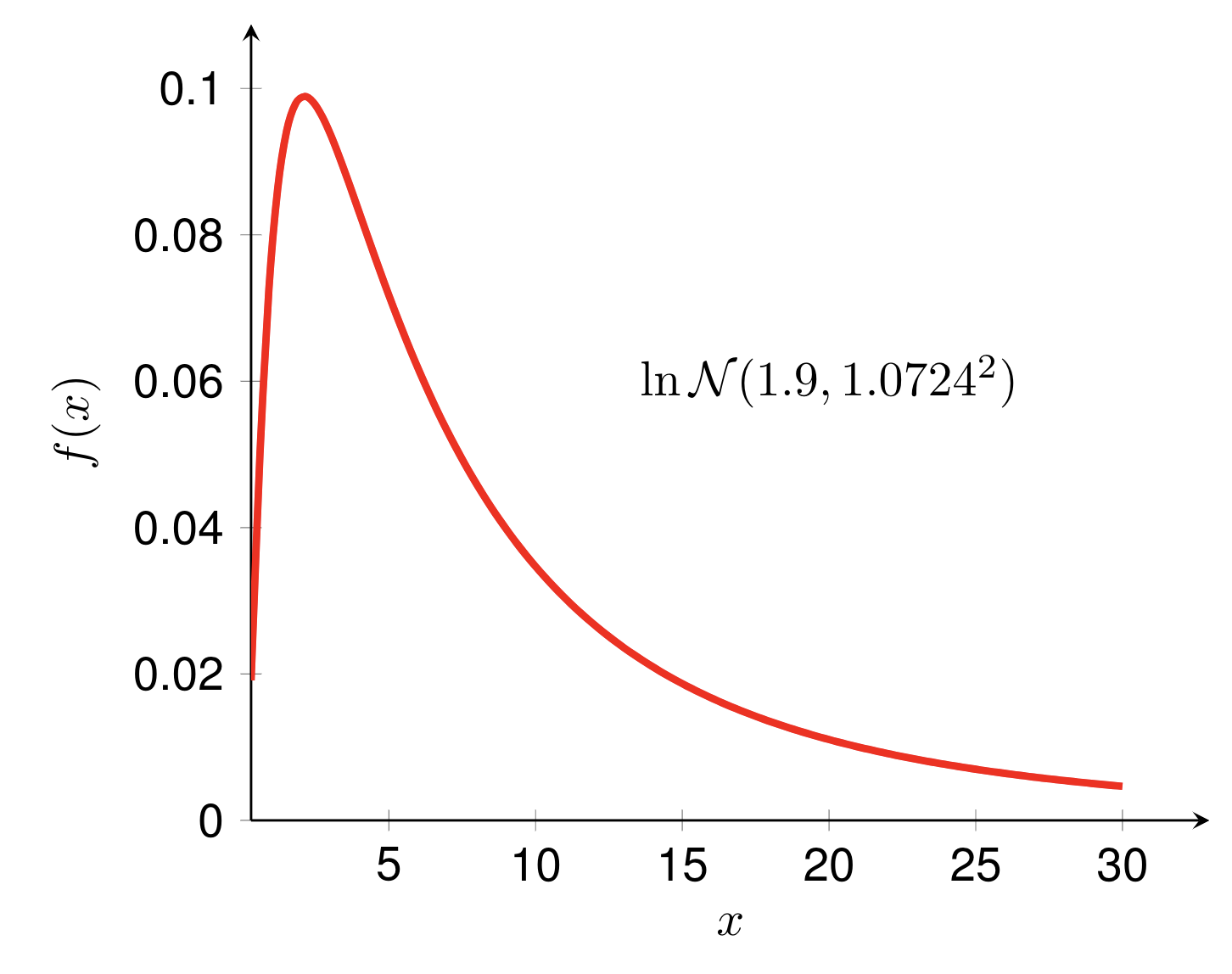
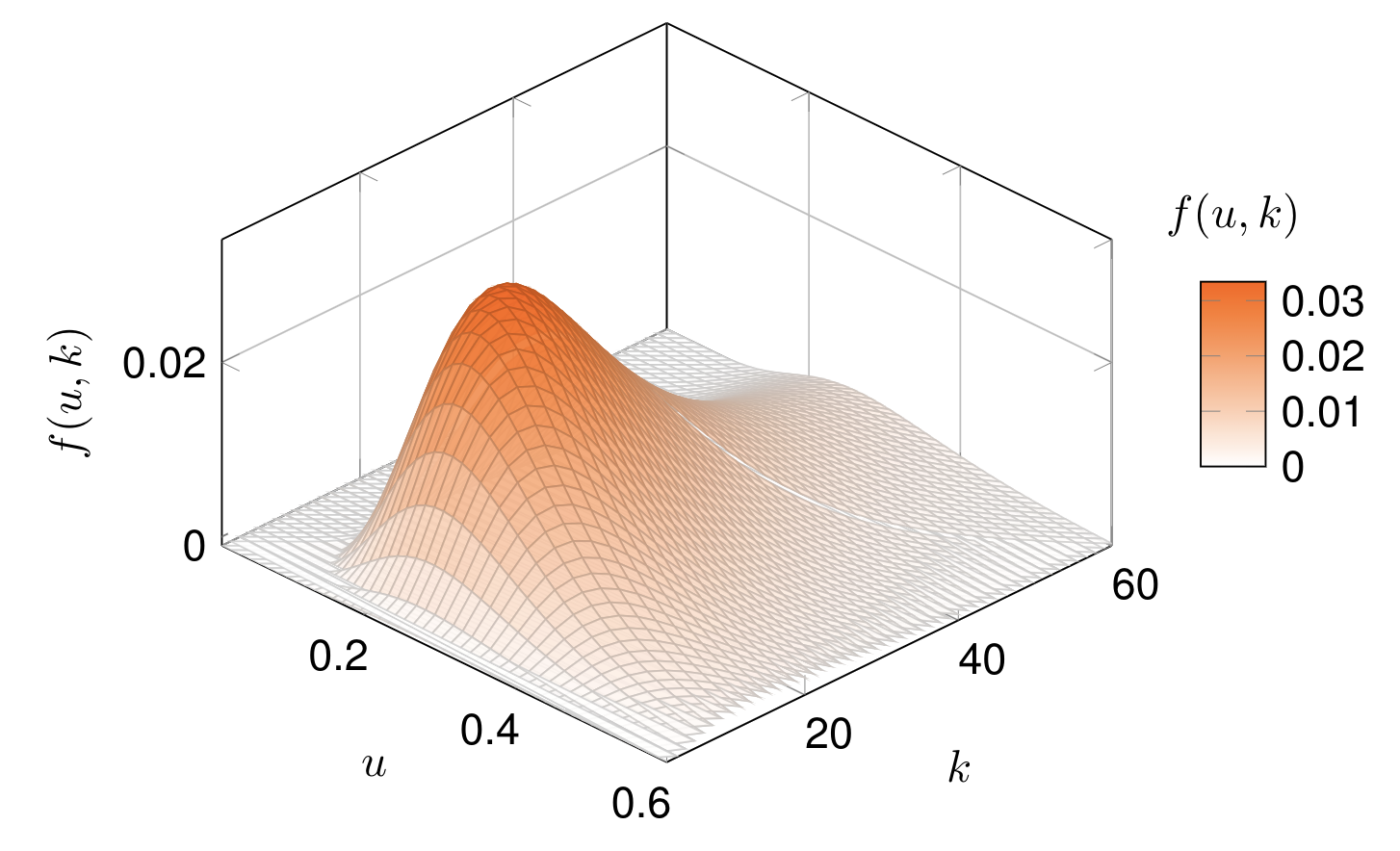
สองตัวอย่างนี้แสดง PDF และ PDF ร่วมของการแจกแจงแบบ Lognormal ตามลำดับ มีเนื้อหาที่แนะนำบางส่วนให้ทำตามตัวอย่าง:
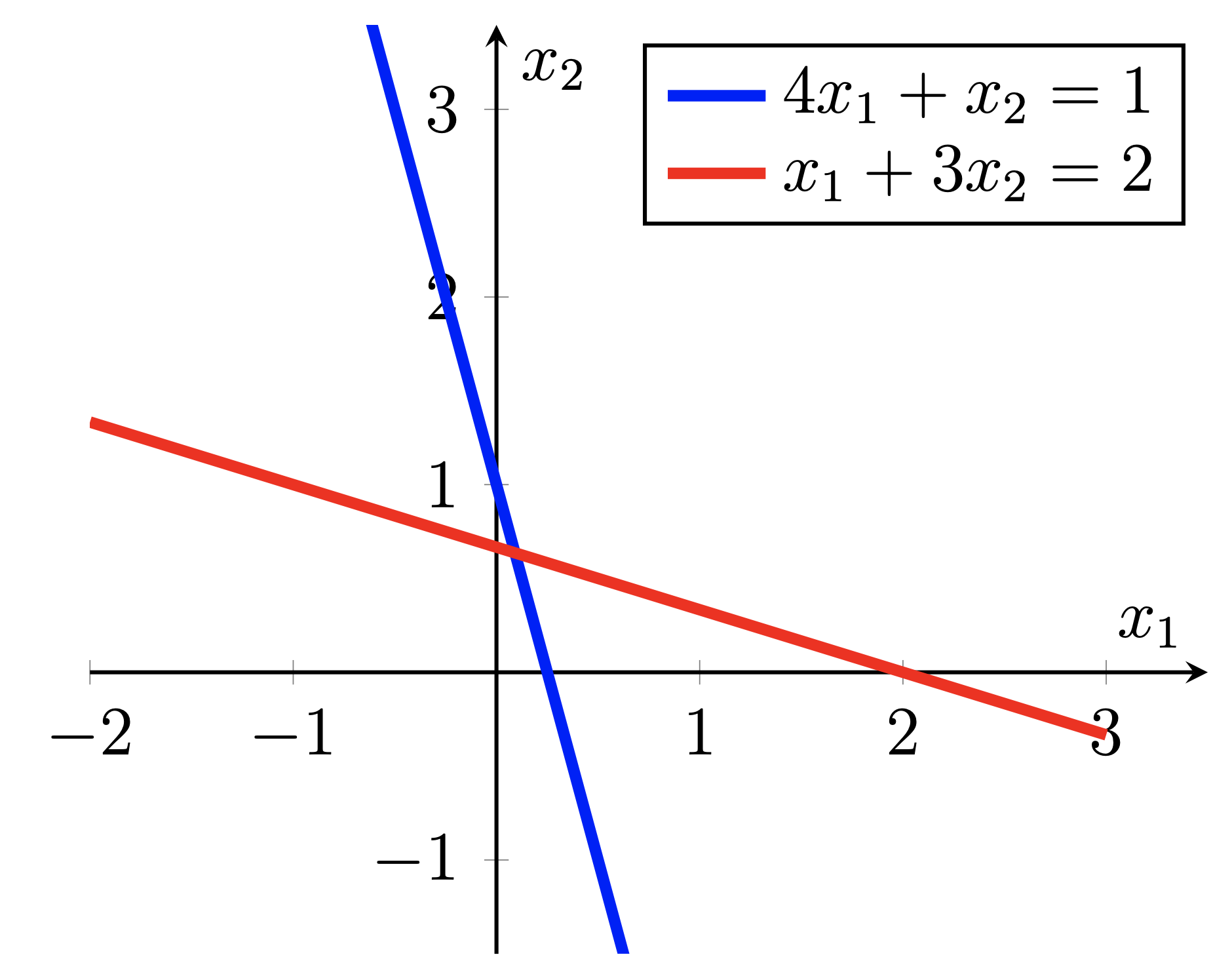
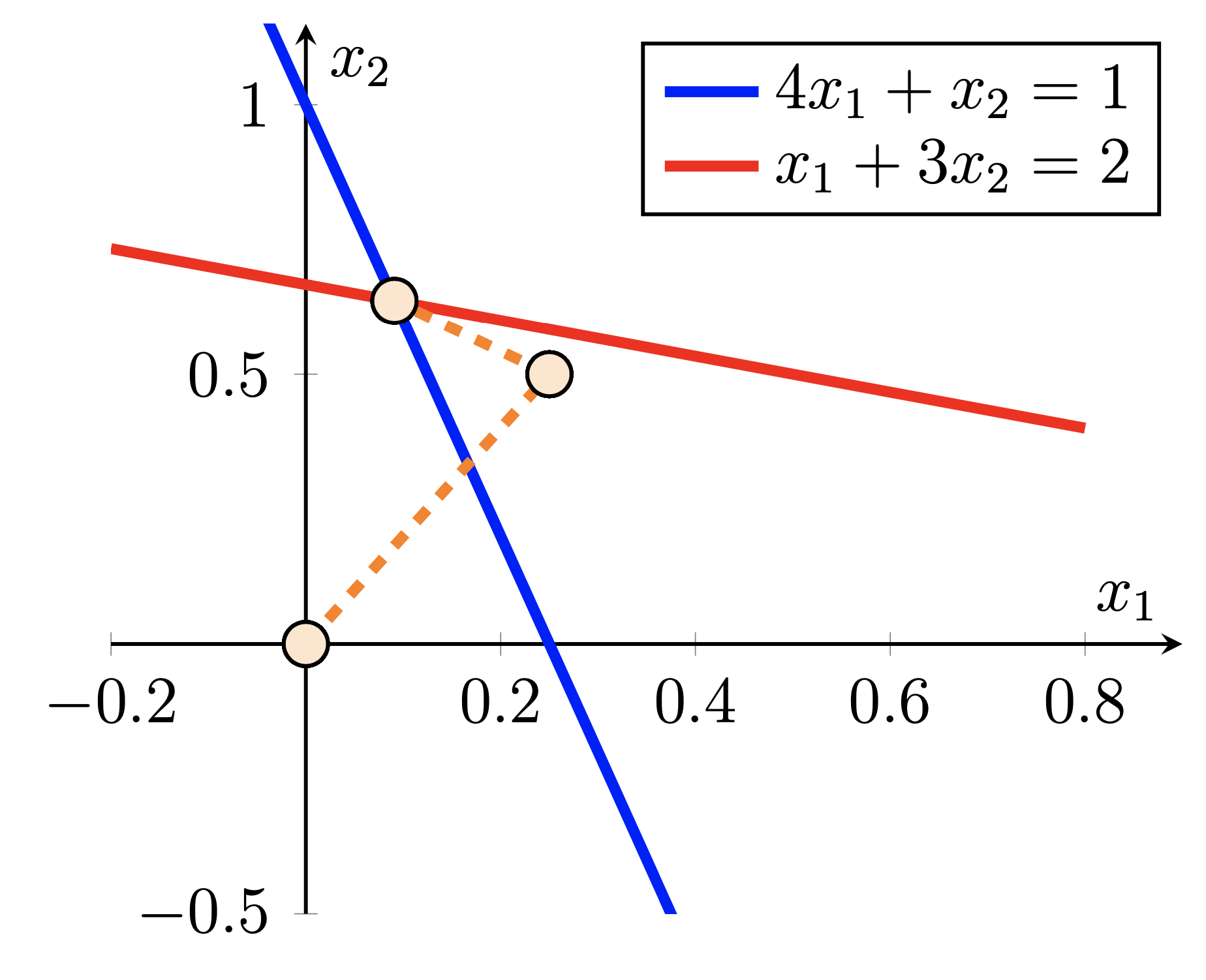
ตัวอย่างทั้งสองนี้แสดงกระบวนการวนซ้ำของการไล่ระดับคอนจูเกตสำหรับการแก้ระบบสมการเชิงเส้น
ตัวอย่างทั้งสองนี้แสดงรูปแบบการหายไปแบบสุ่มและแบบไม่สุ่ม หากต้องการวาดทั้งสองตัวอย่าง เราสามารถทำตามขั้นตอนเหล่านี้:
preamble :documentclass เป็นแบบ standalonetikz และ pgfplotsbegin{filecontents} end{filecontents} เพื่อเก็บข้อมูลbody :begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดbegin{axis} end{axis} เพื่อวาดฟังก์ชันaddplot เพื่อดึงข้อมูล 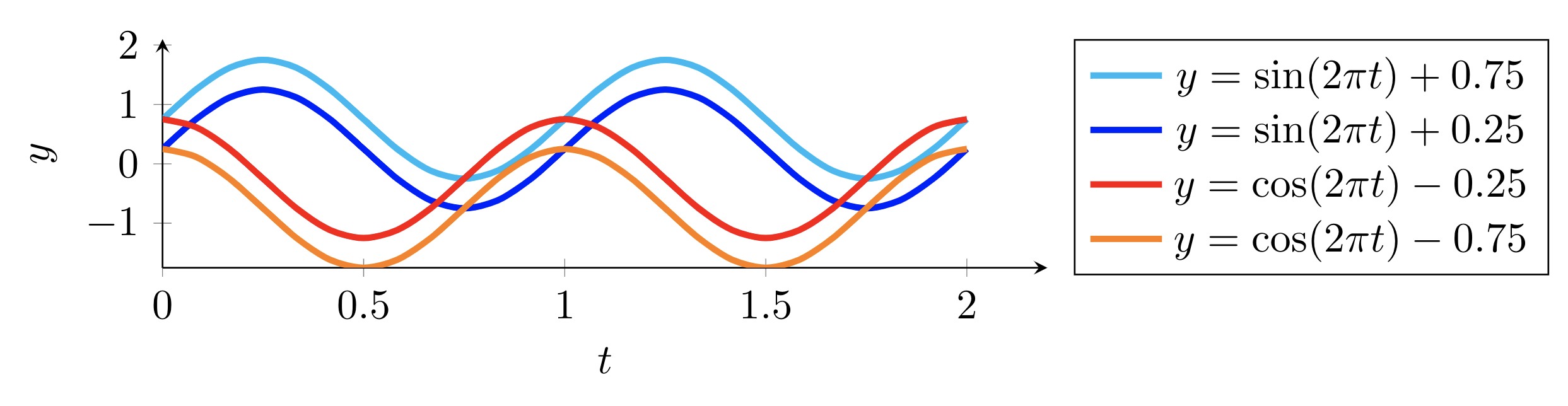
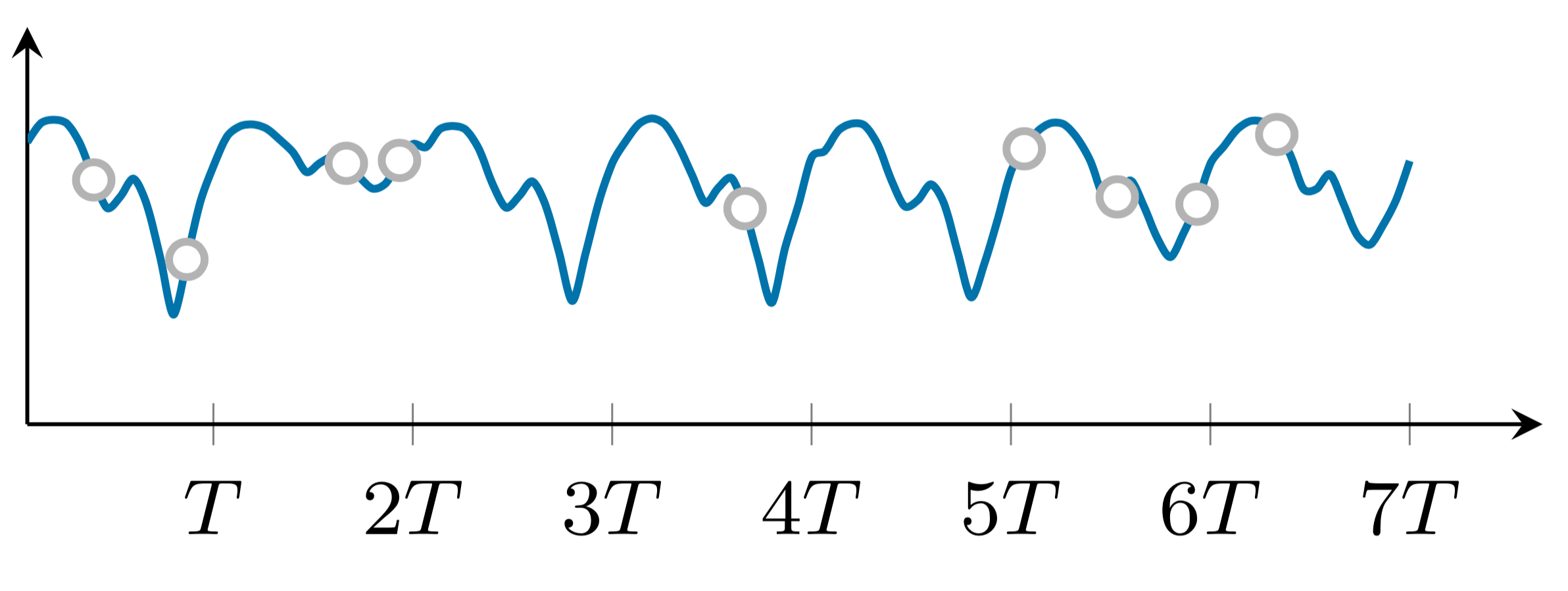
ตัวอย่างนี้แสดงลำดับสี่ลำดับที่ประกอบด้วยฟังก์ชันไซน์และโคไซน์ เมื่อพิจารณาลำดับเหล่านี้เป็นอนุกรมเวลา เราจะเห็นไดนามิกของเวลาสองประเภท นั่นคือ ชนิดหนึ่งมาจากฟังก์ชันไซน์ ในขณะที่อีกชนิดหนึ่งมาจากฟังก์ชันโคไซน์ เพื่อวาดตัวอย่างนี้ เราสามารถทำตามขั้นตอนเหล่านี้:
preamble :documentclass เป็นแบบ standalonepgfplotspgfplotsset{} ตามที่คุณต้องการbody :pgfmathdeclarefunction เพื่อกำหนดฟังก์ชัน PDF ของการแจกแจงแบบปกติ (เกาส์เซียน)begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดbegin{axis} end{axis} เพื่อวาดฟังก์ชันaddplot เพื่อกำหนดฟังก์ชันสำหรับการวาดภาพ ตัวอย่างนี้แสดงให้เห็นถึงกลไกของการคาดการณ์อนุกรมเวลาของข้อมูลการสตรีมในโปรเจ็กต์ฐานติดตามของเรา เพื่อวาดตัวอย่างนี้ เราสามารถทำตามขั้นตอนเหล่านี้:
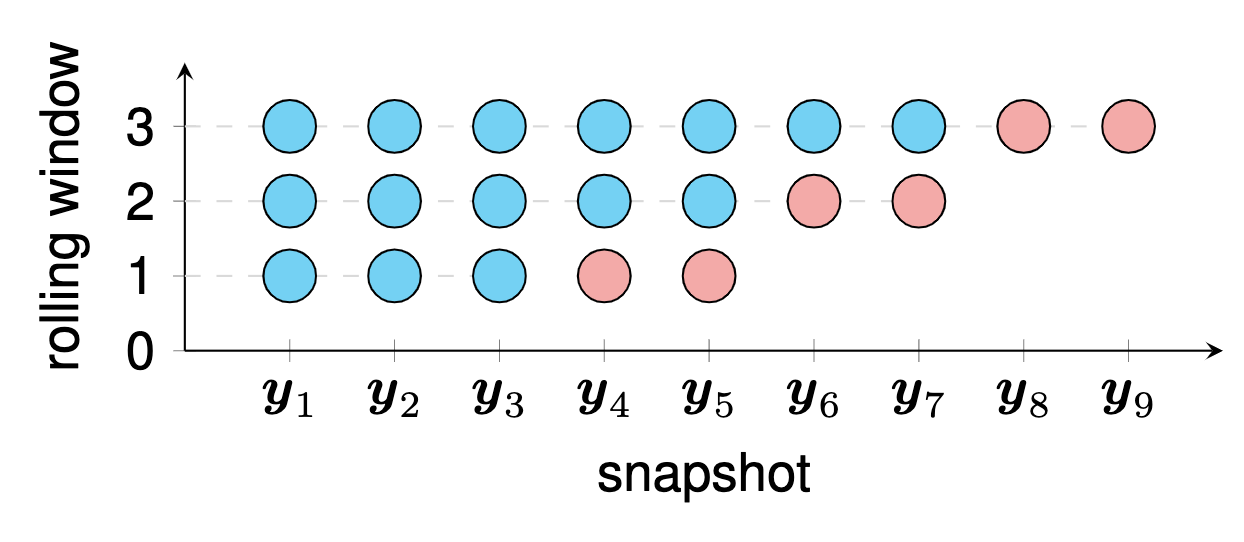
preamble :documentclass เป็นแบบ standalonetikz และ pgfplotspgfplotsset{} ตามที่คุณต้องการbody :begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดbegin{axis} end{axis} เพื่อกำหนดกราฟิกaddplot เพื่อกำหนดเครื่องหมายที่พิกัดบางพิกัดและระบุสีของเครื่องหมายเหล่านี้tikz สำหรับโครงสร้างเมทริกซ์ 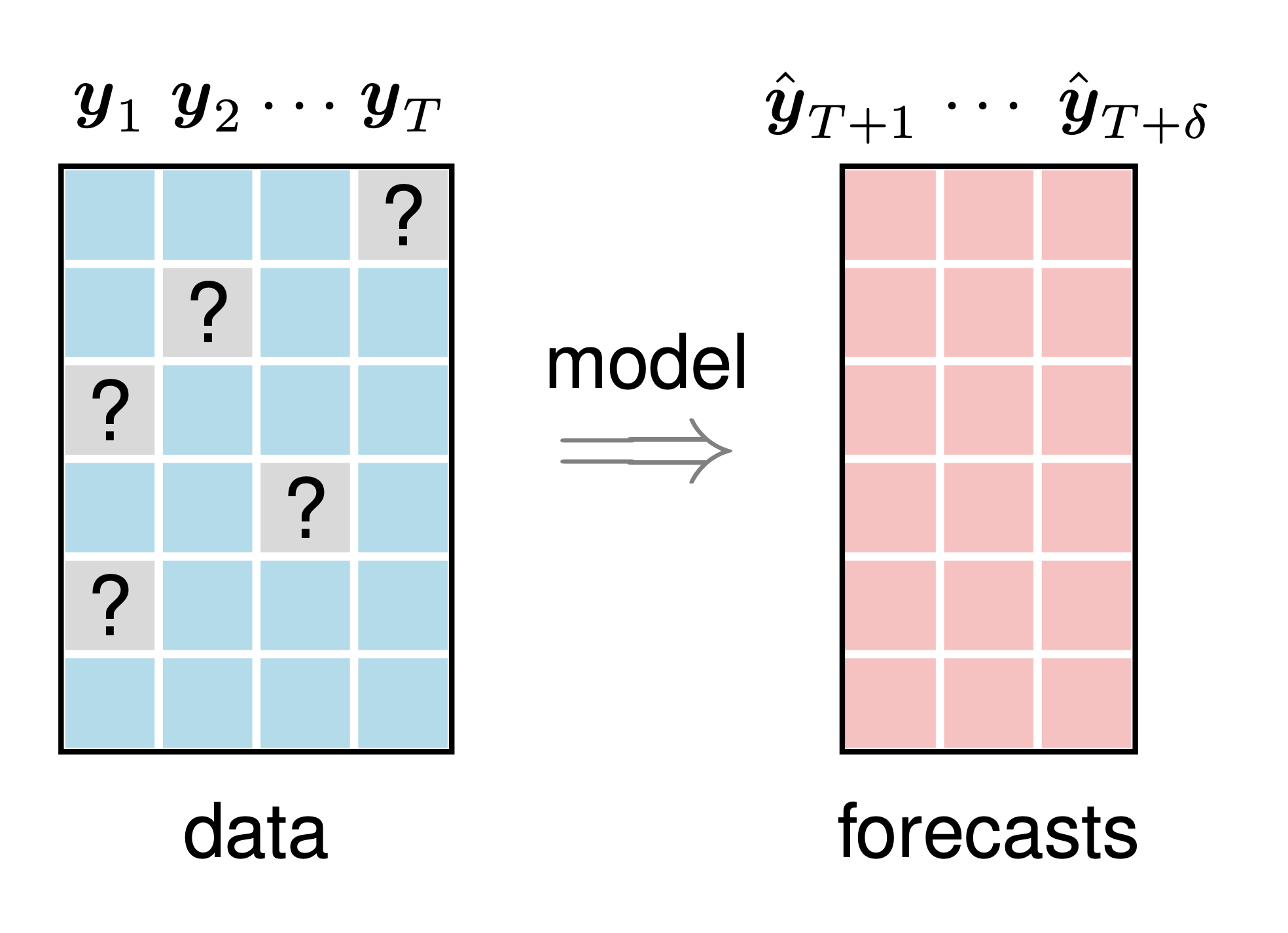
ตัวอย่างนี้แสดงภาพกราฟิกของปัญหาการคาดการณ์อนุกรมเวลาหลายตัวแปรที่มีค่าขาดหายไป เพื่อวาดตัวอย่างนี้ เราสามารถทำตามขั้นตอนเหล่านี้:
preamble :documentclass เป็นแบบ standalonetikzbody :Depth , Width และ Height โดยใช้ newcommandbegin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดdraw , filldraw และ node เพื่อกำหนดสี่เหลี่ยมและโหนด 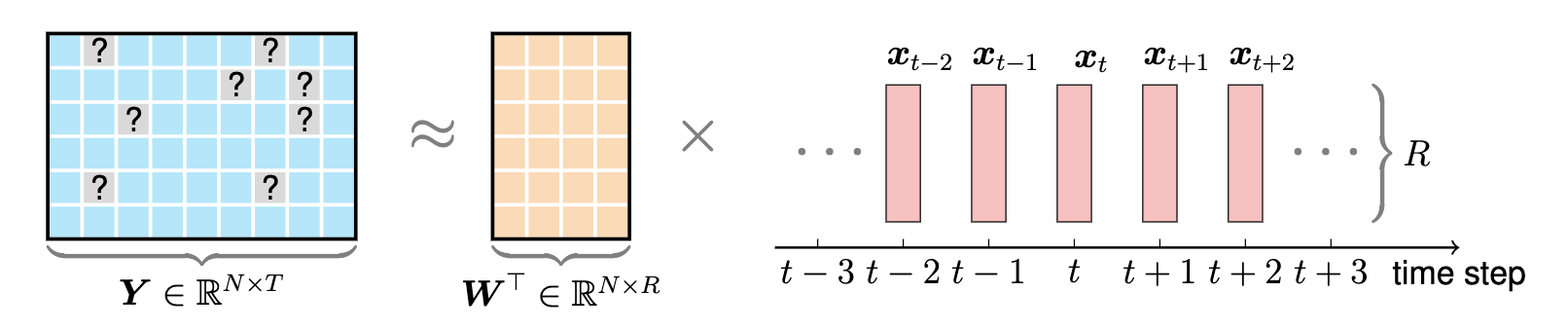
ตัวอย่างนี้ให้ภาพประกอบแบบกราฟิกของการแยกตัวประกอบเมทริกซ์ชั่วคราว เพื่อวาดตัวอย่างนี้ เราสามารถทำตามขั้นตอนเหล่านี้:
preamble :documentclass เป็นแบบ standalonetikzbody :begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดdraw และ filldraw เพื่อตั้งค่าโหนดและสี่เหลี่ยม 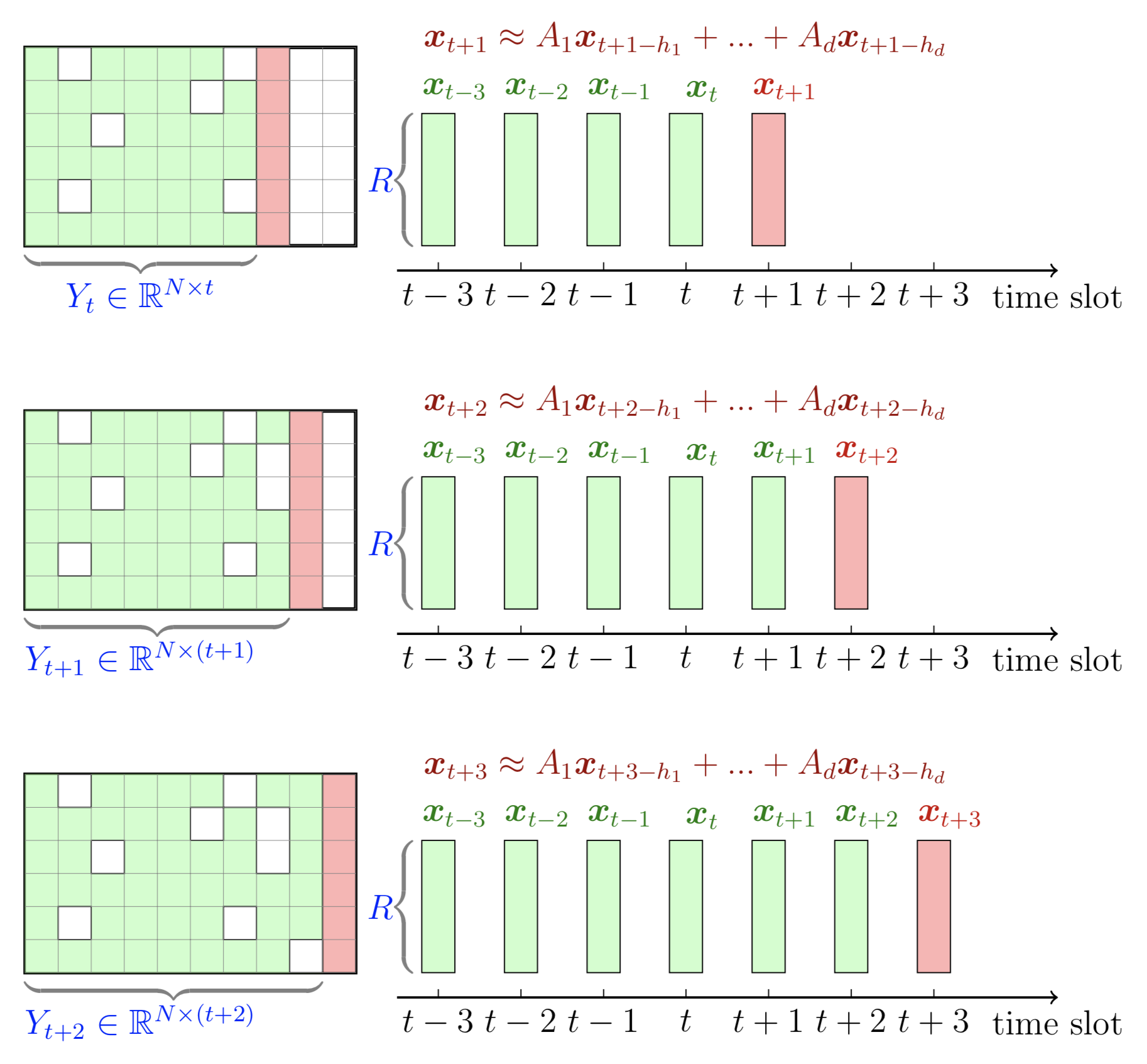
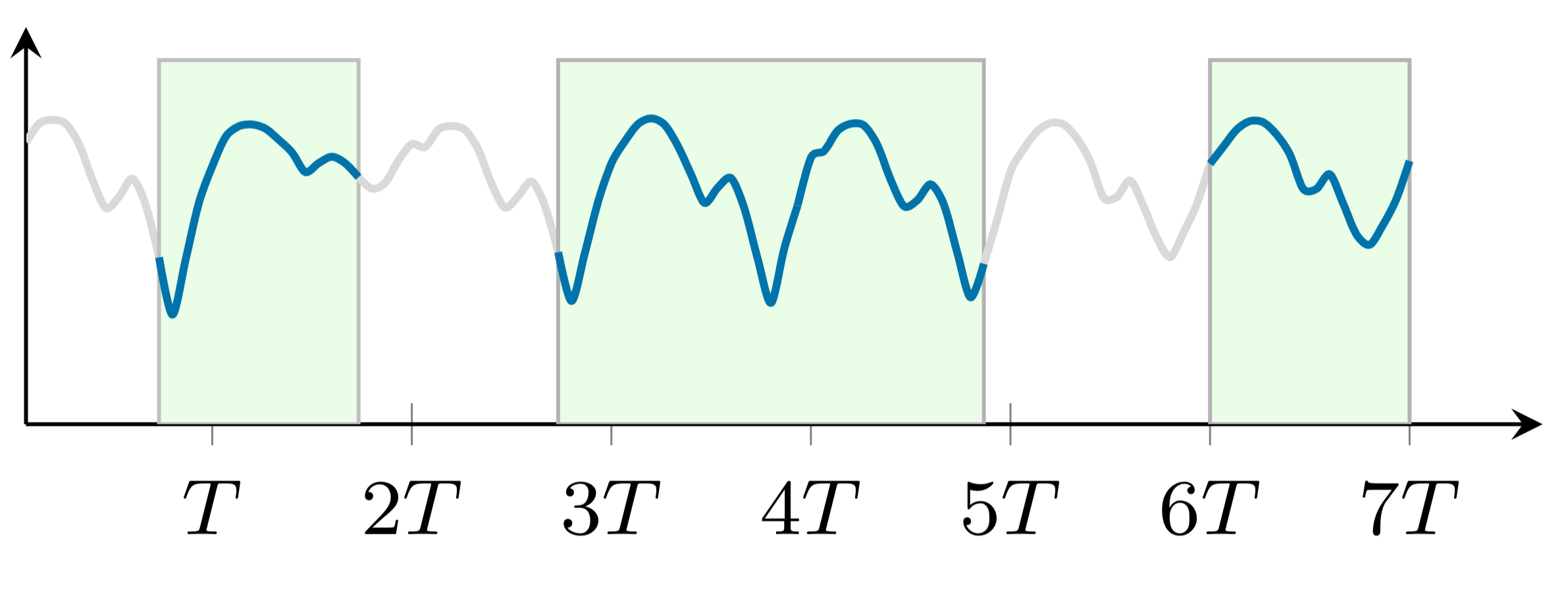
ตัวอย่างนี้แสดงภาพประกอบแบบกราฟิกของการพยากรณ์อนุกรมเวลาแบบกลิ้งด้วยการแยกตัวประกอบเมทริกซ์ชั่วคราว เพื่อวาดตัวอย่างนี้ เราสามารถทำตามขั้นตอนเหล่านี้:
preamble :documentclass เป็นแบบ standalonetikzbody :begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดdraw และ filldraw เพื่อตั้งค่าโหนดและสี่เหลี่ยมtikz-3dplot สำหรับโครงสร้างเทนเซอร์ ตัวอย่างนี้ให้ภาพประกอบแบบกราฟิกของเทนเซอร์ลำดับที่สาม เพื่อวาดตัวอย่างนี้ เราสามารถทำตามขั้นตอนเหล่านี้:
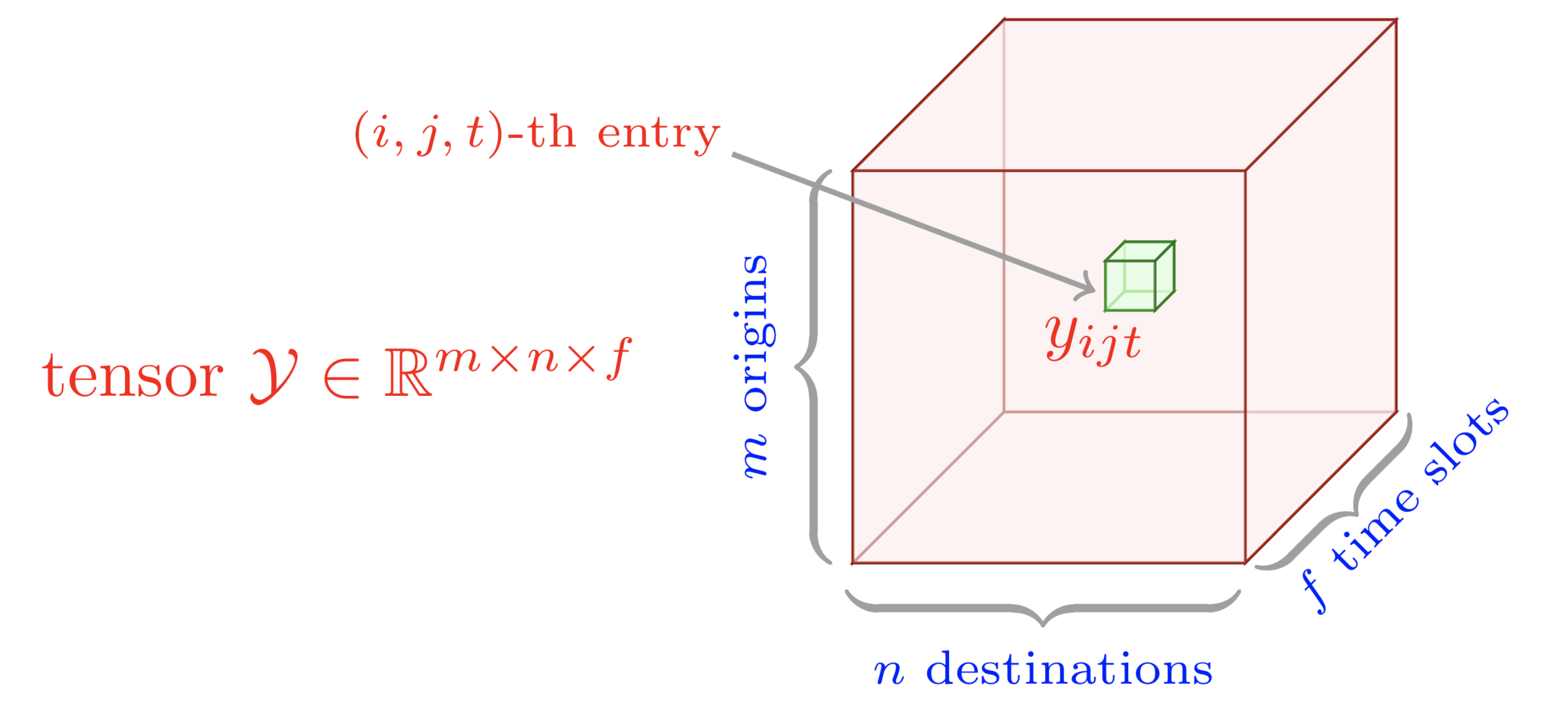
preamble :documentclass เป็นแบบ standalonetikz และ tikz-3dplotbody :Depth , Width และ Height โดยใช้ newcommandbegin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดdraw เพื่อกำหนดโหนด ตัวอย่างนี้ให้ภาพประกอบแบบกราฟิกของการแยกตัวประกอบเทนเซอร์ซีพีคลาสสิกบนเทนเซอร์ลำดับที่สาม เพื่อวาดตัวอย่างนี้ เราสามารถทำตามขั้นตอนเหล่านี้:
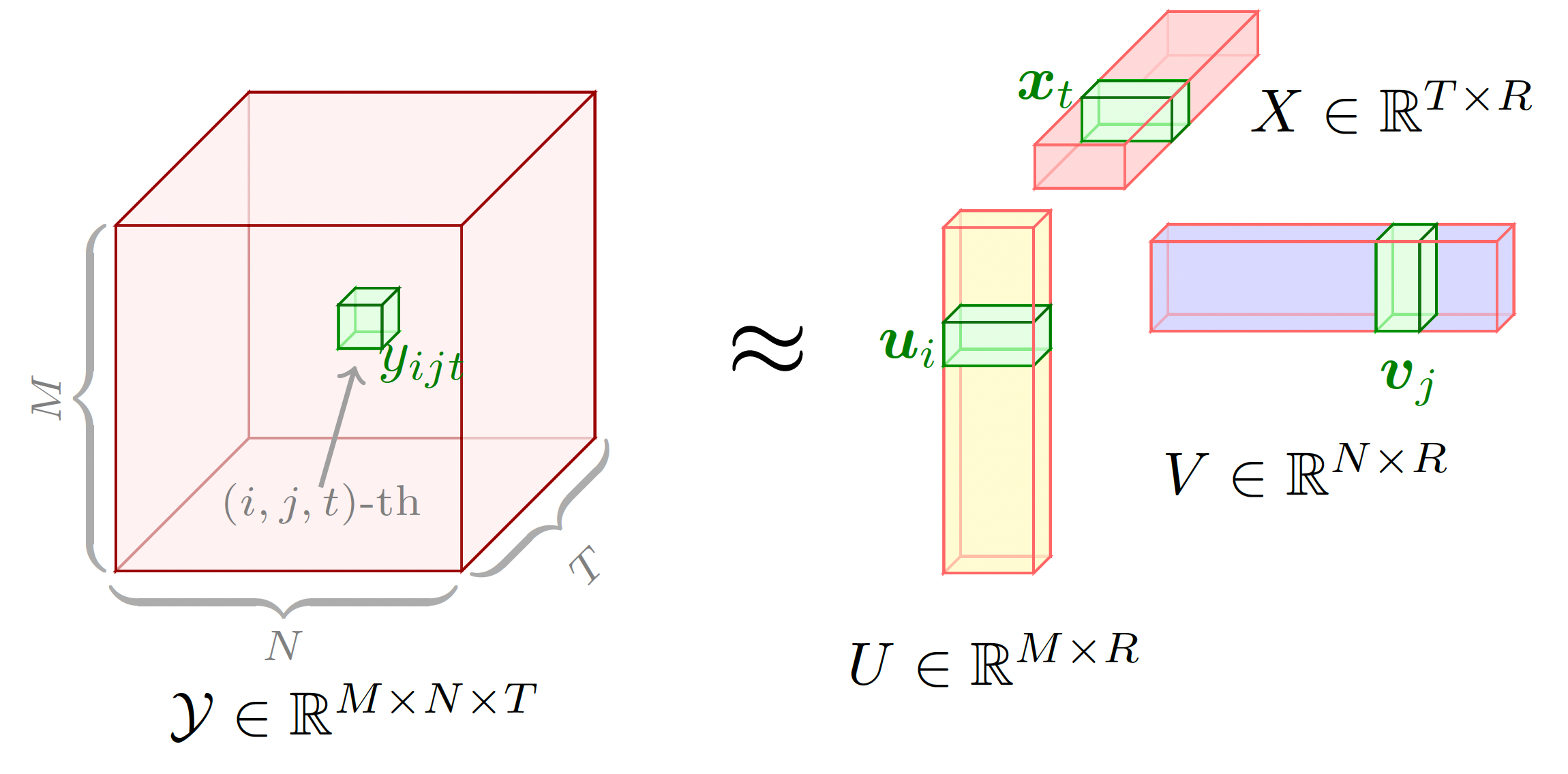
preamble :documentclass เป็นแบบ standalonetikz และ tikz-3dplotbody :Depth , Width และ Height โดยใช้ newcommandbegin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดdraw เพื่อกำหนดโหนด 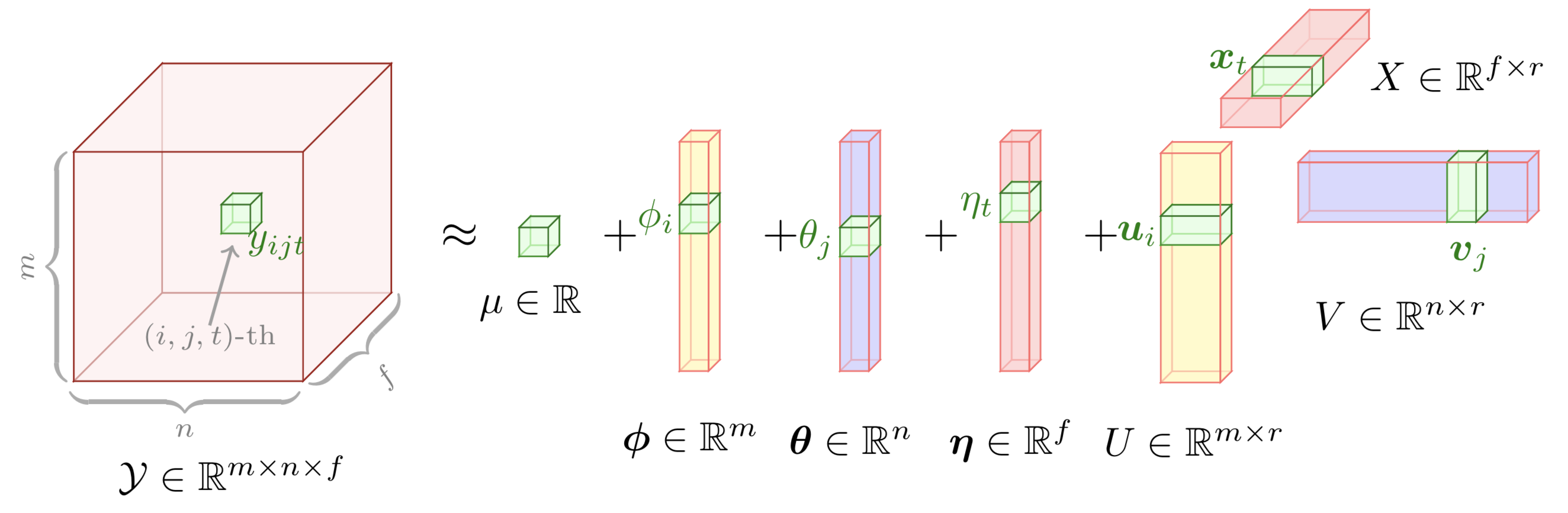
ตัวอย่างนี้ให้ภาพประกอบแบบกราฟิกของแบบจำลองการแยกตัวประกอบเทนเซอร์แบบเติม เพื่อวาดตัวอย่างนี้ เราสามารถทำตามขั้นตอนเหล่านี้:
preamble :documentclass เป็นแบบ standalonetikz และ tikz-3dplotbody :Depth , Width และ Height โดยใช้ newcommandbegin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดdraw เพื่อกำหนดโหนด 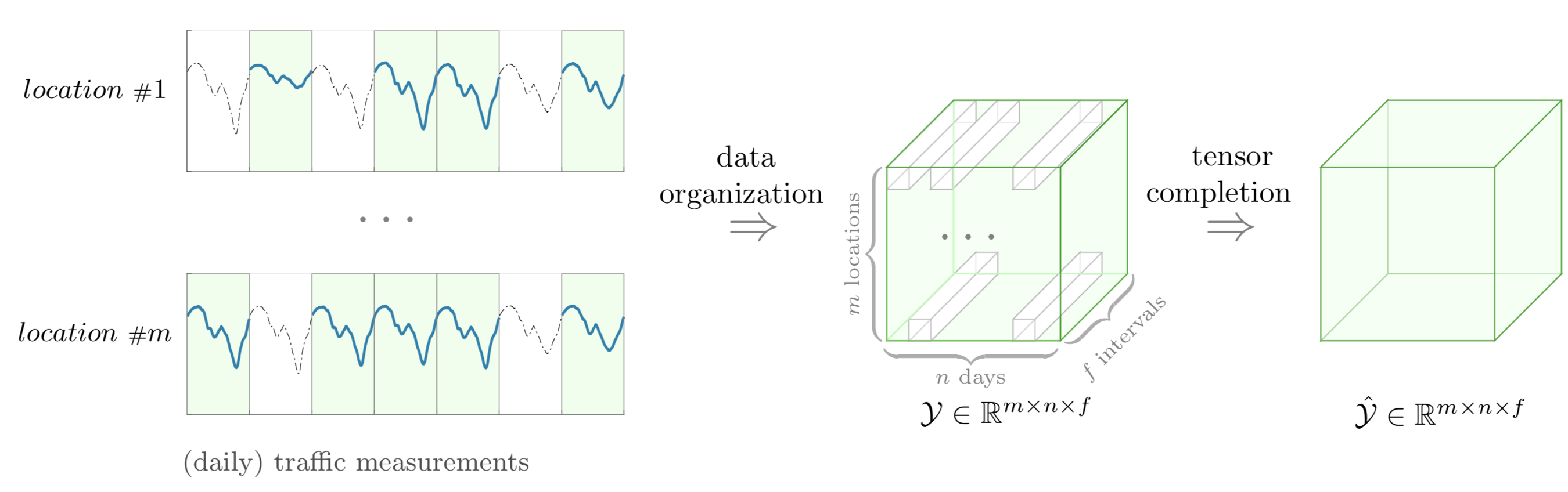
ตัวอย่างนี้ให้ภาพประกอบแบบกราฟิกของงานการทำให้เทนเซอร์สมบูรณ์ และกรอบงาน รวมถึงการจัดระเบียบข้อมูลและความสมบูรณ์ของเทนเซอร์ ซึ่งจะมีการตรวจวัดปริมาณการรับส่งข้อมูลบางส่วน เพื่อวาดตัวอย่างนี้ เราสามารถทำตามขั้นตอนเหล่านี้:
preamble :documentclass เป็นแบบ standalonetikz และ tikz-3dplotbody :Depth , Width และ Height โดยใช้ newcommandbegin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดdraw เพื่อกำหนดโหนด 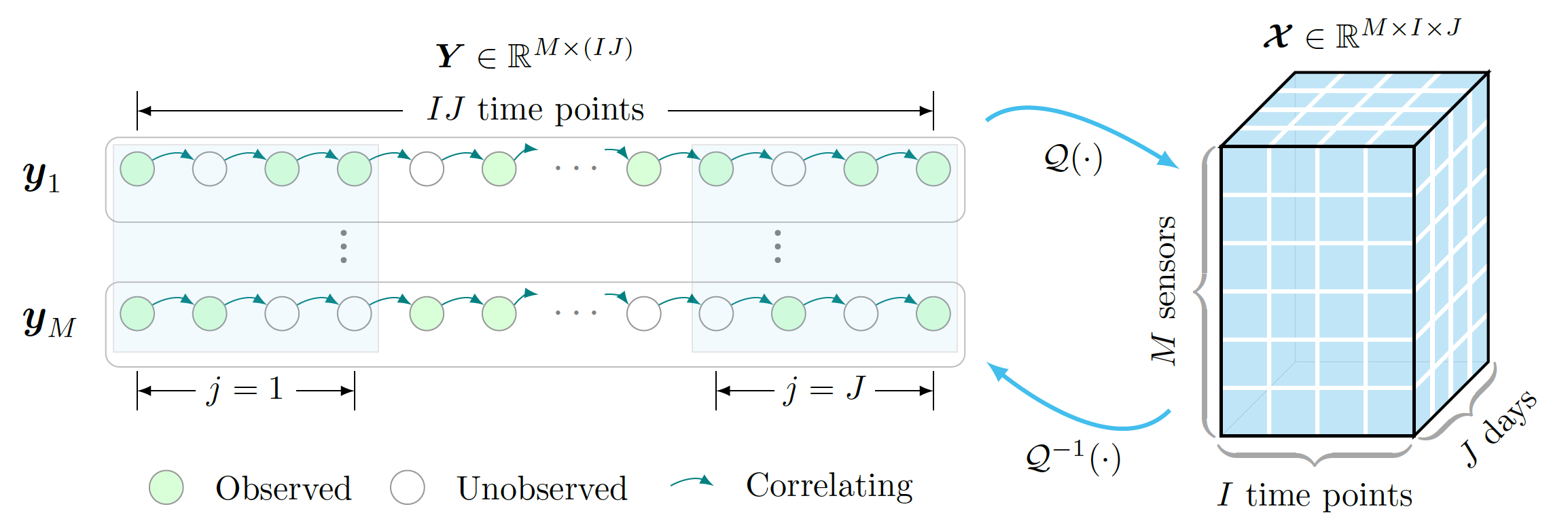
ตัวอย่างนี้ให้ภาพประกอบแบบกราฟิกของแบบจำลองการทำให้เทนเซอร์แบบถดถอยอัตโนมัติอันดับต่ำ เพื่อวาดตัวอย่างนี้ เราสามารถทำตามขั้นตอนเหล่านี้:
preamble :documentclass เป็นแบบ standalonetikz และ tikz-3dplotbody :Depth , Width และ Height โดยใช้ newcommandbegin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดnode , path , plate เพื่อกำหนดโหนด ลูกศร และเพลทdraw เพื่อกำหนดโหนด ตัวอย่างนี้ให้ภาพประกอบแบบกราฟิกของกระบวนการกำหนดเกณฑ์ค่าเอกพจน์ของข้อมูลเทนเซอร์ที่มีการแปลงแบบรวม เพื่อวาดตัวอย่างนี้ เราสามารถทำตามขั้นตอนเหล่านี้:
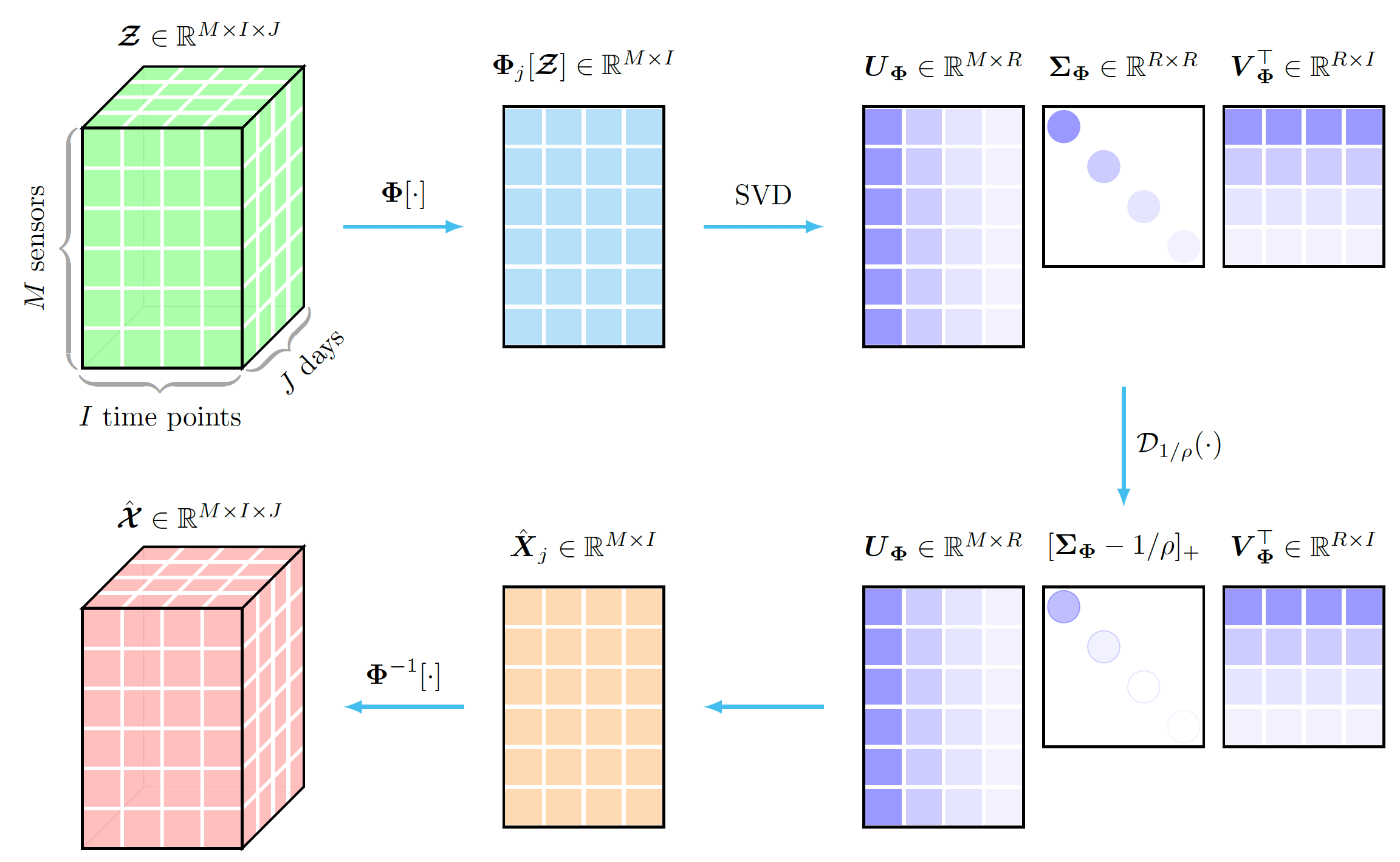
preamble :documentclass เป็นแบบ standalonetikz และ tikz-3dplotbody :Depth , Width และ Height โดยใช้ newcommandbegin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดnode เพื่อกำหนดโหนดdraw เพื่อกำหนดโหนดfilldraw เพื่อกำหนดสีของสี่เหลี่ยม 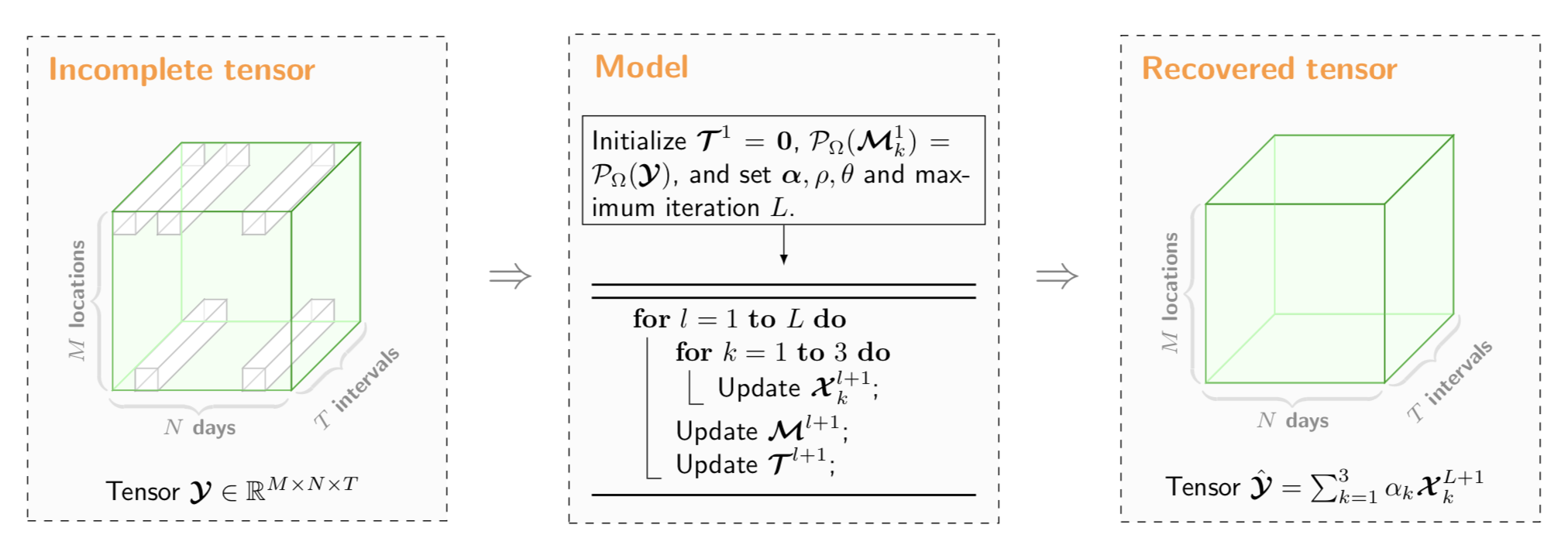
ตัวอย่างนี้ให้ภาพประกอบแบบกราฟิกของโมเดลเทนเซอร์ระดับต่ำที่สมบูรณ์ เพื่อวาดตัวอย่างนี้ เราสามารถทำตามขั้นตอนเหล่านี้:
preamble :documentclass เป็นแบบ standalonetikz และ tikz-3dplotalgorithm2eusetikzlibrary{positioning, matrix, fit, calc}body :begin{algorithm} end{algorithm} เพื่อกำหนดอัลกอริทึมmatrix เพื่อวางตำแหน่งส่วนประกอบbegin{scope} end{scope} เพื่อบรรจุเลเยอร์ 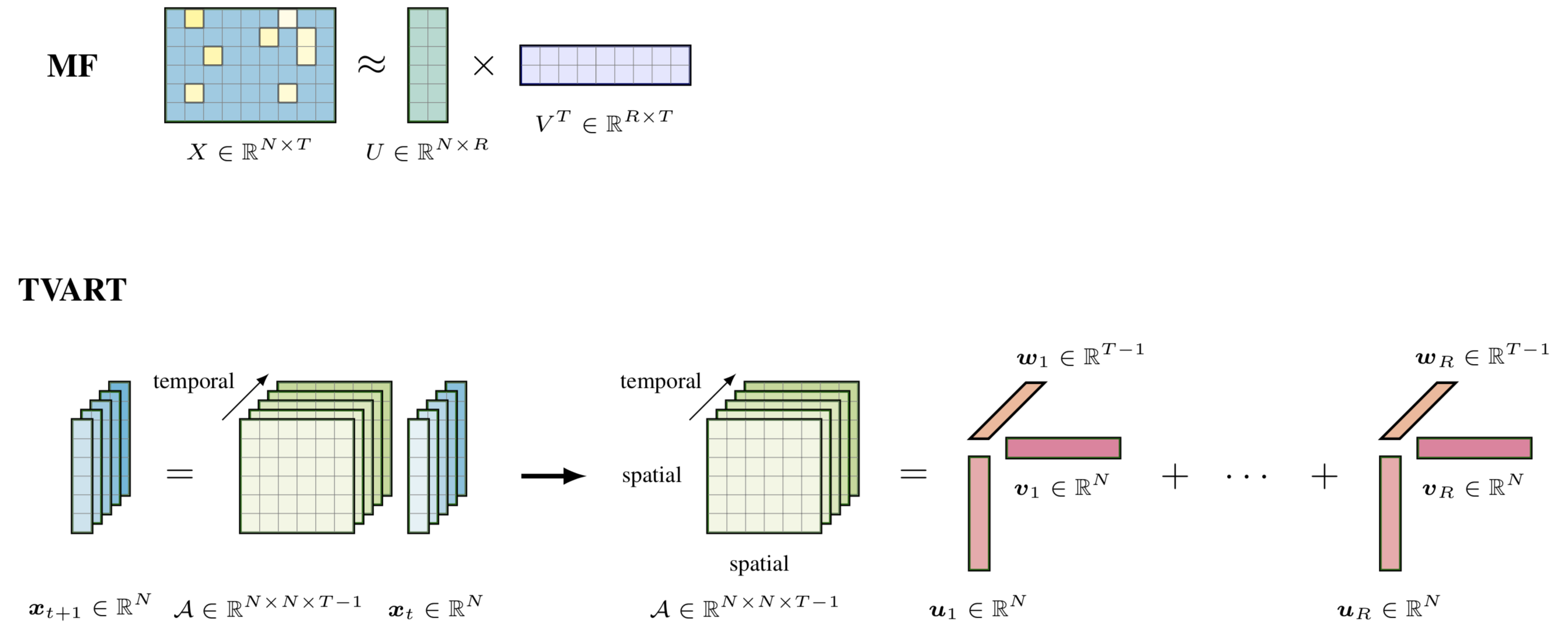
ตัวอย่างนี้ให้ภาพประกอบแบบกราฟิกของแบบจำลองการถดถอยเทนเซอร์อันดับต่ำ เพื่อวาดตัวอย่างนี้ เราสามารถทำตามขั้นตอนเหล่านี้:
preamble :documentclass เป็นแบบ standalonetikz และ tikz-3dplotbody :Depth , Width และ Height โดยใช้ newcommandbegin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดdraw เพื่อกำหนดโหนด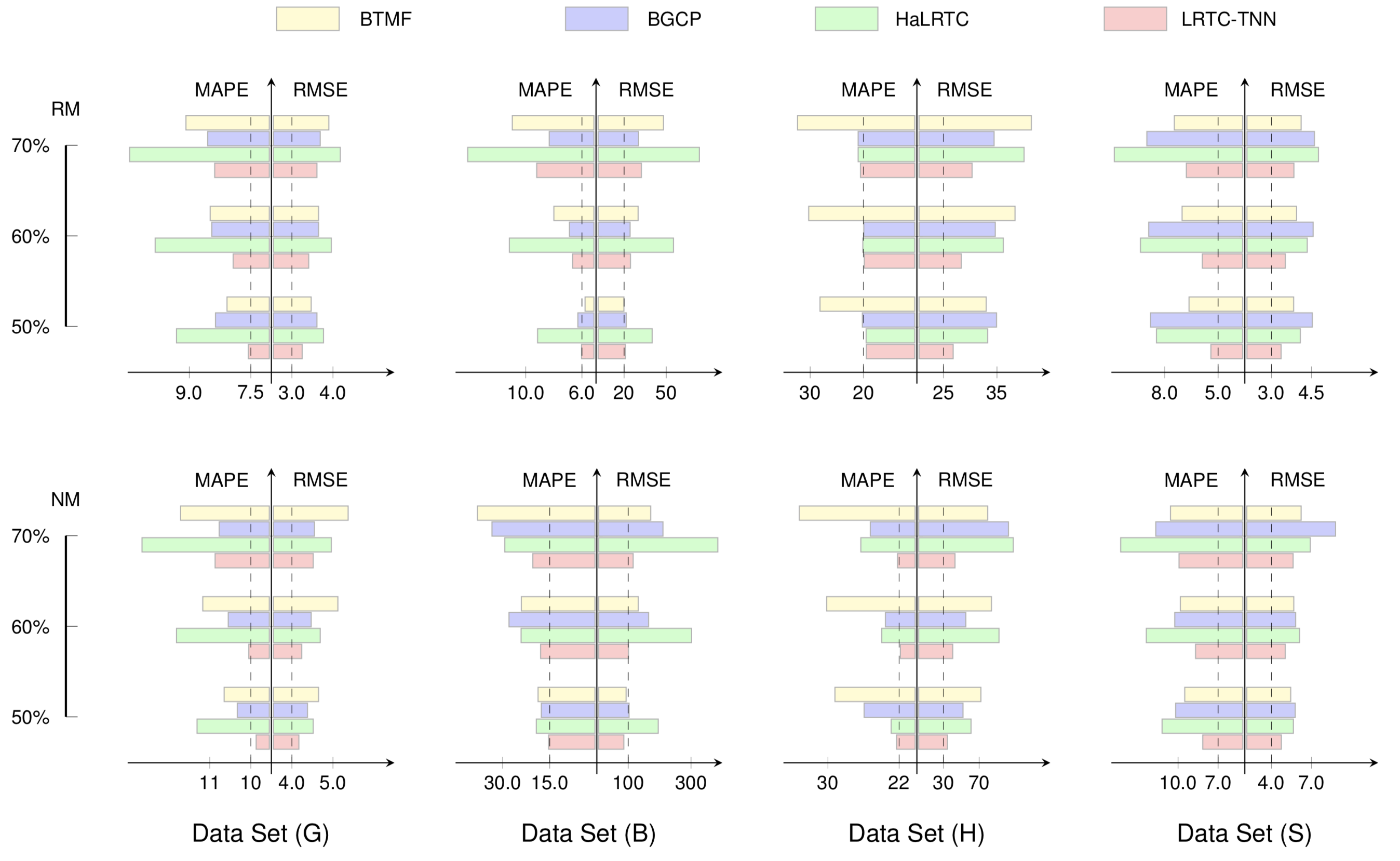
ตัวอย่างนี้แสดงความแม่นยำในการใส่ข้อมูลของโมเดลเมทริกซ์และเทนเซอร์บางรุ่น เพื่อวาดตัวอย่างนี้ เราสามารถทำตามขั้นตอนเหล่านี้:
preamble :documentclass เป็นแบบ standalonetikzbody :begin{tikzpicture} end{tikzpicture} เพื่อเริ่มวาดdraw เพื่อกำหนดโหนดpgfuseimage เพื่อนำเข้ารูปภาพ ตัวอย่างเหล่านี้ส่วนใหญ่มาจากเอกสารของเรา:
ซินหยู เฉิน, จ้านหง เฉิง, ฮั่นฉิน ไฉ, นิโคลัส โซเนียร์, ลี่จุน ซุน (2024) การแทนค่าแบบ Convolutional ของ Laplacian สำหรับการใส่อนุกรมเวลาของทราฟฟิก ธุรกรรม IEEE เกี่ยวกับความรู้และวิศวกรรมข้อมูล 36 (11): 6490-6502 [พิมพ์ล่วงหน้า] [DOI] [สไลด์] [ข้อมูลและรหัส Python]
ซินหยู่ เฉิน, ลี่จุน ซุน (2022) การแยกตัวประกอบชั่วคราวแบบเบย์สำหรับการทำนายอนุกรมเวลาหลายมิติ ธุรกรรม IEEE เกี่ยวกับการวิเคราะห์รูปแบบและความฉลาดของเครื่องจักร, 44 (9): 4659-4673 [พิมพ์ล่วงหน้า] [DOI] [สไลด์] [ข้อมูลและรหัส Python]
ซินหยู เฉิน, เมิ่งอิง เล่ย, นิโคลัส โซเนียร์, ลี่จุน ซุน (2022) การเติมเทนเซอร์แบบออโตรีเกรสซีฟระดับต่ำสำหรับการใส่ข้อมูลทราฟฟิกเชิงพื้นที่ ธุรกรรม IEEE บนระบบขนส่งอัจฉริยะ 23 (8): 12301-12310 [พิมพ์ล่วงหน้า] [DOI] [รหัสข้อมูลและ Python] (ยังได้รับการยอมรับในส่วนหนึ่งของ MiLeTS Workshop ของ KDD 2021 ดูเอกสารการประชุมเชิงปฏิบัติการ)
ซินหยู่ เฉิน, อี้เซียน เฉิน, นิโคลัส โซเนียร์, ลี่จุน ซุน (2021) การเรียนรู้เทนเซอร์ระดับต่ำที่ปรับขนาดได้สำหรับการใส่ข้อมูลทราฟฟิกเชิงพื้นที่ การวิจัยการขนส่งส่วนที่ C: เทคโนโลยีใหม่, 129: 103226 [พิมพ์ล่วงหน้า] [DOI] [ข้อมูล] [รหัส Python]
ซินหยู เฉิน, ลี่จุน ซุน (2020) ความสมบูรณ์ของเทนเซอร์แบบถดถอยอัตโนมัติอันดับต่ำสำหรับการพยากรณ์อนุกรมเวลาหลายตัวแปร arXiv พิมพ์ล่วงหน้า arXiv: 2006.10436 [พิมพ์ล่วงหน้า] [ข้อมูลและโค้ด Python]
ซินหยู่ เฉิน, จินหมิง หยาง, ลี่จุน ซุน (2020) แบบจำลองเทนเซอร์อันดับต่ำแบบไม่นูนสำหรับการใส่ข้อมูลทราฟฟิกเชิงพื้นที่ การวิจัยการขนส่งส่วนที่ C: เทคโนโลยีใหม่, 117: 102673 [พิมพ์ล่วงหน้า] [DOI] [รหัสข้อมูลและ Python]
Xinyu Chen, Zhaocheng He, Yixian Chen, Yuhuan Lu, Jiawei Wang (2019) ไม่มีการใส่ข้อมูลการจราจรและการค้นพบรูปแบบด้วยแบบจำลองการแยกตัวประกอบเทนเซอร์แบบเบย์ การวิจัยการขนส่งส่วนที่ C: เทคโนโลยีเกิดใหม่, 104: 66-77 [DOI] [สไลด์] [ข้อมูล] [รหัส Matlab] [รหัส Python]
ซินหยู่ เฉิน, จ้าวเฉิงเหอ, ลี่จุน ซุน (2019) วิธีการสลายตัวของเทนเซอร์แบบเบย์สำหรับการใส่ข้อมูลทราฟฟิกเชิงพื้นที่ การวิจัยการขนส่งส่วนที่ C: เทคโนโลยีเกิดใหม่, 98: 73-84 [พิมพ์ล่วงหน้า] [DOI] [ข้อมูล] [รหัส Matlab] [รหัส Python]


