panda gym
v3.0.7
ชุดสภาพแวดล้อมหุ่นยนต์ที่ใช้เครื่องยนต์ฟิสิกส์ PyBullet และโรงยิม

ตรวจสอบเอกสาร
pip install panda-gymgit clone https://github.com/qgallouedec/panda-gym.git
pip install -e panda-gym import gymnasium as gym
import panda_gym
env = gym . make ( 'PandaReach-v3' , render_mode = "human" )
observation , info = env . reset ()
for _ in range ( 1000 ):
action = env . action_space . sample () # random action
observation , reward , terminated , truncated , info = env . step ( action )
if terminated or truncated :
observation , info = env . reset ()
env . close ()คุณยังสามารถ
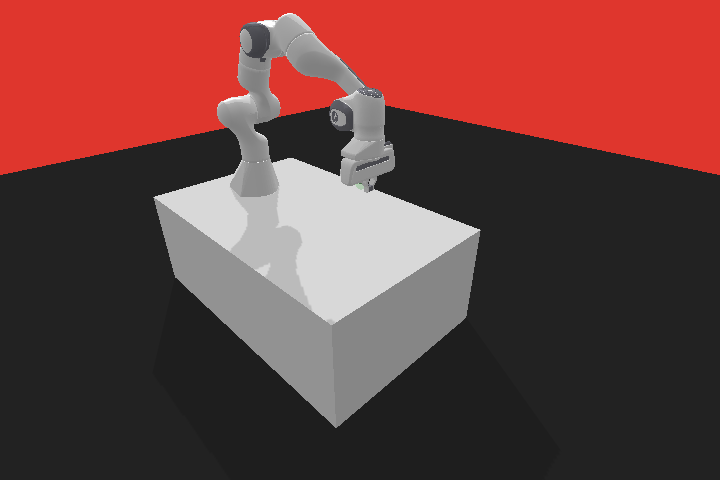
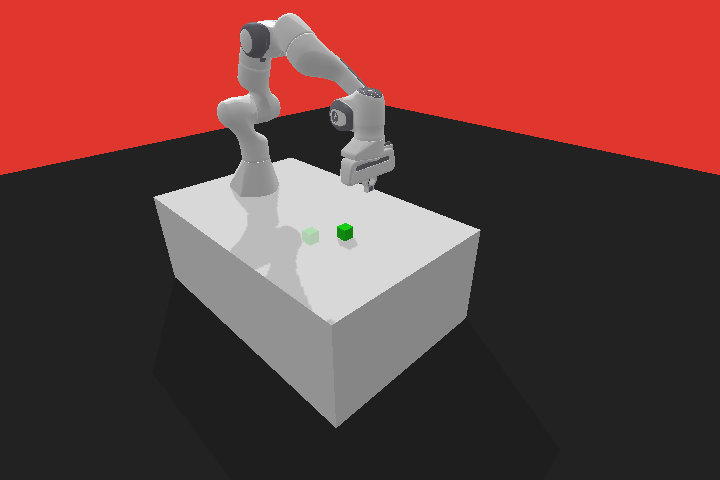
PandaReach-v3 | PandaPush-v3 |
 |  |
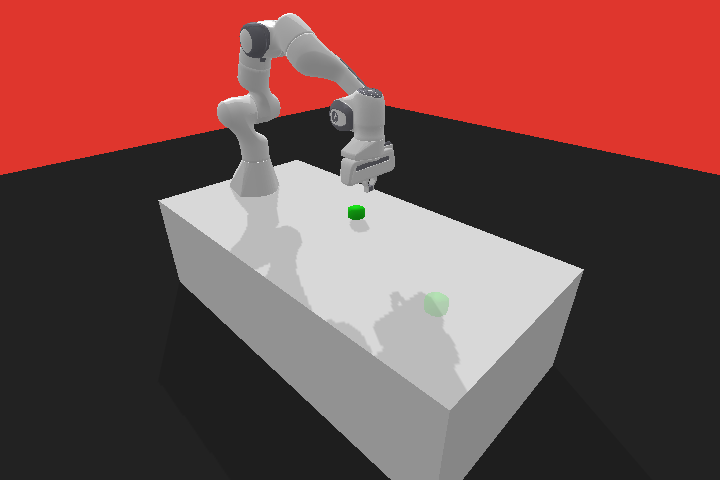
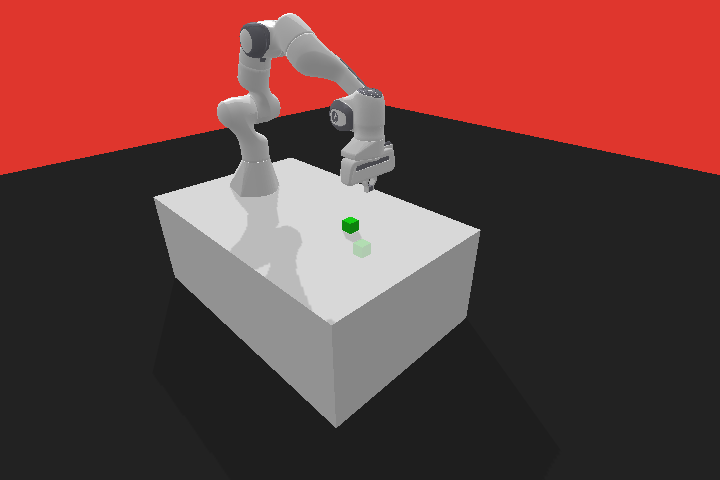
PandaSlide-v3 | PandaPickAndPlace-v3 |
 |  |
PandaStack-v3 | PandaFlip-v3 |
 |  |
ผลลัพธ์พื้นฐานมีอยู่ใน rl-baselines3-zoo และตัวแทนที่ได้รับการฝึกอบรมล่วงหน้าใน Hugging Face Hub
อ้างเป็น
@article { gallouedec2021pandagym ,
title = { {panda-gym: Open-Source Goal-Conditioned Environments for Robotic Learning} } ,
author = { Gallou{'e}dec, Quentin and Cazin, Nicolas and Dellandr{'e}a, Emmanuel and Chen, Liming } ,
year = 2021 ,
journal = { 4th Robot Learning Workshop: Self-Supervised and Lifelong Learning at NeurIPS } ,
}สภาพแวดล้อมได้รับแรงบันดาลใจอย่างกว้างขวางจากสภาพแวดล้อม OpenAI Fetch


