tacto
1.0.0
![]()
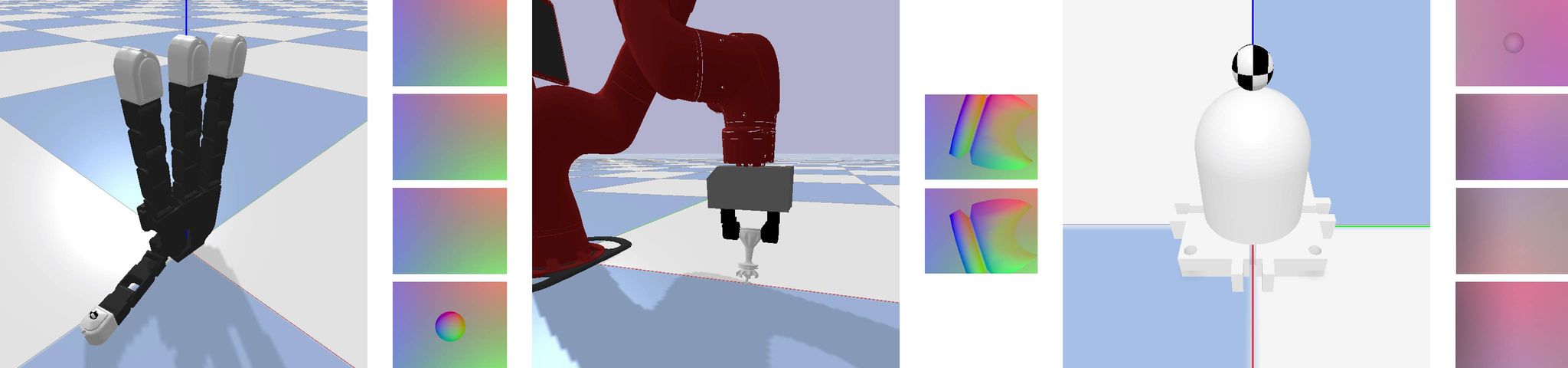
该软件包为基于视觉的触觉传感器(例如 DIGIT)提供了模拟器。它提供了与 PyBullet 集成的模型,以及触摸读数的渲染器。有关更多信息,请参阅相应的论文 TACTO:用于基于高分辨率视觉的触觉传感器的快速、灵活和开源模拟器。
注意:模拟器并不是要提供物理上精确的接触动态(例如变形、摩擦),而是依赖于现有的物理引擎。
如需更新和讨论,请加入 www.touch-sensing.org 社区的 #TACTO 频道。
首选安装方式是通过 PyPi:
pip install tacto或者,您可以手动克隆存储库并使用以下命令安装包:
git clone https://github.com/facebookresearch/tacto.git
cd tacto
pip install -e . 该软件包包含几个组件:
运行以下示例需要额外的软件包(torch、gym、pybulletX)。您可以通过pip install -r requirements/examples.txt安装它们。
有关如何将 TACTO 与 PyBullet 结合使用的基本示例,请参阅 [TBD],
有关如何仅使用渲染器引擎的示例,请查看 Examples/demo_render.py。
有关如何将模拟器与 PyBullet 一起使用的高级示例,请查看示例文件夹。
注意:渲染器需要屏幕。对于无头渲染,请使用带有 GPU 和 CUDA 驱动程序的“EGL”模式或带有 CPU 的“OSMESA”模式。有关更多详细信息,请参阅 PyRender。
此外,通过以下方式安装 PyOpenGL 的修补版本:
pip install git+https://github.com/mmatl/pyopengl.git@76d1261adee2d3fd99b418e75b0416bb7d2865e6
然后,您可以指定用于无头渲染的引擎,例如,
import os
os.environ["PYOPENGL_PLATFORM"] = "osmesa" # osmesa cpu rendering
我们建议在Ubuntu上进行实验。
据我们所知,对于macOS来说,pybullet.GUI 和 Pyrender 之间存在一些可视化问题。如果可以解决,请告知我们,我们将在存储库中分享信息!
该项目已获得 MIT 许可,如 LICENSE 文件中所示。
如果您在研究中使用该项目,请引用:
@Article { Wang2022TACTO ,
author = { Wang, Shaoxiong and Lambeta, Mike and Chou, Po-Wei and Calandra, Roberto } ,
title = { {TACTO}: A Fast, Flexible, and Open-source Simulator for High-resolution Vision-based Tactile Sensors } ,
journal = { IEEE Robotics and Automation Letters (RA-L) } ,
year = { 2022 } ,
volume = { 7 } ,
number = { 2 } ,
pages = { 3930--3937 } ,
issn = { 2377-3766 } ,
doi = { 10.1109/LRA.2022.3146945 } ,
url = { https://arxiv.org/abs/2012.08456 } ,
}

