Navigating Ryze Tello Drones With MATLAB App
v1.1.1
为了以交互方式控制连接到运行 MATLAB® 的计算机的 Ryze® Tello Drone,MathWorks® 提供了 MATLAB 应用程序 - Ryze Tello Navigator。这个应用程序可以帮助您:
查看所有连接到电脑 WiFi 网络的 Ryze Tello 无人机。
执行无人机的起飞/着陆。
使用键盘或应用程序中的导航控制按钮控制无人机的导航。
预览相机输入并捕获图像。
将无人机的视频输入记录到 MATLAB 工作区变量中。
生成用于完成导航的 MATLAB 脚本。
为 Ryze Tello 无人机安装 MATLAB 和 MATLAB 支持包
执行初始设置和配置并连接到一台或多台 Ryze Tello 无人机。
下载或克隆此存储库。
导航到 MATLAB 中的本地存储库文件夹
在 MATLAB 命令窗口中执行以下命令:
添加路径(密码);
保存路径;
通过执行ryzeTelloNavigator命令启动应用程序。
需要 MATLAB 版本 R2022a 或更高版本
适用于 Ryze Tello® 无人机的 MATLAB® 支持包
确保设备列表中显示的无人机是您想要使用该应用程序控制的无人机。如果无人机未列出,请再次执行设置和配置。
| 步 | 行动 | 结果 |
|---|---|---|
| 1 |  从设备列表中单击无人机的名称,然后单击顶部导航部分中的飞行前检查。 从设备列表中单击无人机的名称,然后单击顶部导航部分中的飞行前检查。 | 将出现一个新对话框“运行飞行前检查表”。在进行飞行前检查时,应用程序中的所有其他控件均被禁用。如果出现错误,该对话框会提供所需故障排除步骤的链接 |
| 2 | 确认所有飞行前检查均已成功完成后,单击“确定”。 |  飞行前检查已完成指示显示在应用程序的右侧。所有其他控件也已启用。 飞行前检查已完成指示显示在应用程序的右侧。所有其他控件也已启用。 |
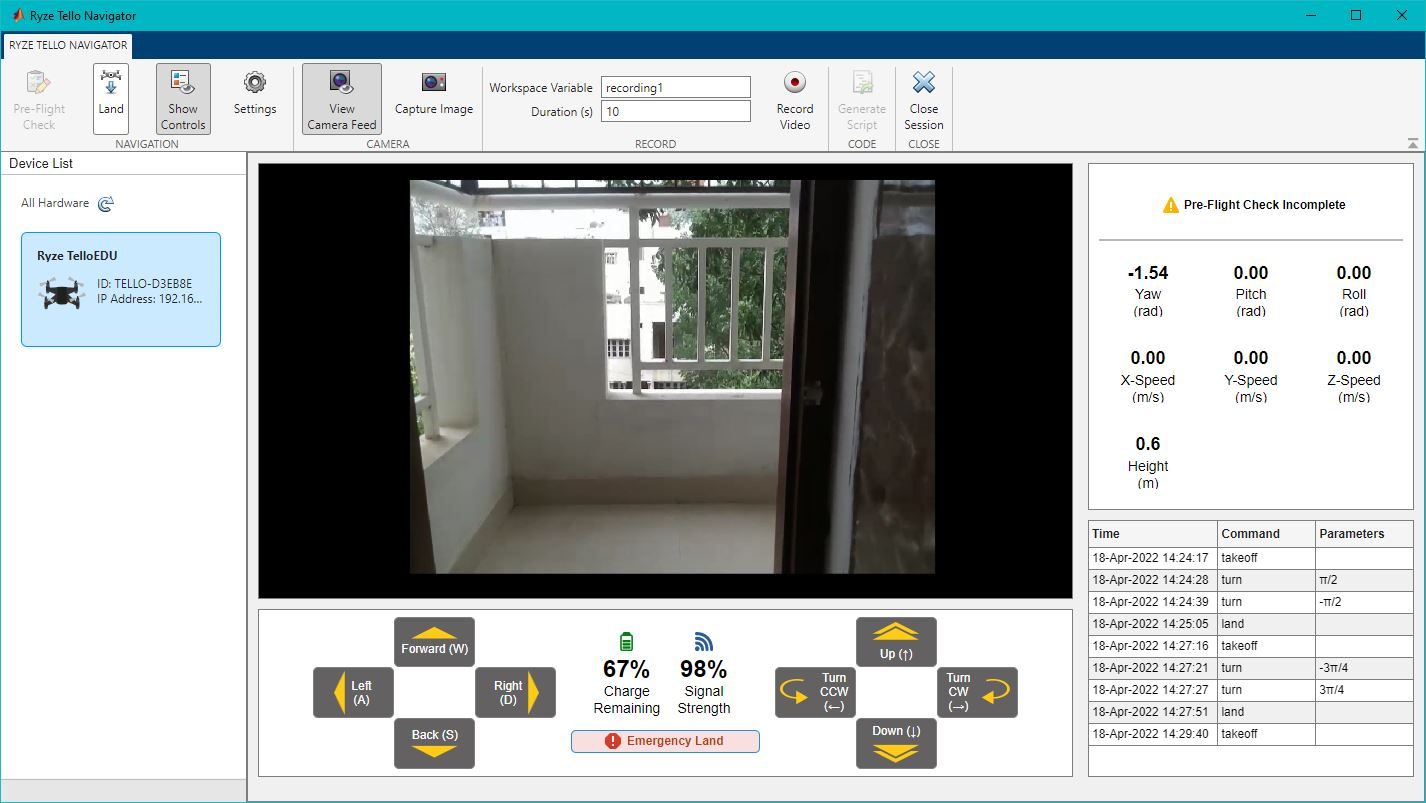
Ryze Tello Navigator 可帮助您执行起飞/着陆并交互式控制 Ryze Tello 无人机。
注意:在开始无人机起飞之前,请考虑一般安全预防措施。如果您在起飞过程中或执行手动导航控制时(如后续步骤所述)感觉到无人机及周围环境可能发生任何损坏,您可以点击紧急降落。单击此按钮会触发无人机电机紧急关闭,使其从当前高度掉落到地面(对于 Tello EDU 无人机)或强制无人机从当前位置垂直着陆(对于 Tello 无人机)。
| 步 | 行动 | 结果 |
|---|---|---|
| 1 |  检查应用程序中显示的无人机电池电量和信号强度是否足以执行起飞和控制。 检查应用程序中显示的无人机电池电量和信号强度是否足以执行起飞和控制。 | |
| 2 |  单击“查看摄像机源”以验证无人机的摄像机源是否正常工作。 单击“查看摄像机源”以验证无人机的摄像机源是否正常工作。 | 该应用程序会显示无人机起飞前相机所看到的预览。稍后,当无人机移动时,预览将根据摄像机的实时反馈进行更新。 |
| 3 |  按键盘上的空格键或单击工具条区域导航部分中显示的起飞。 按键盘上的空格键或单击工具条区域导航部分中显示的起飞。 | 无人机的电机启动,无人机起飞到特定高度并在该位置悬停。起飞按钮被着陆按钮取代。 |
| 4 | 通过单击应用程序中的相应图标或使用键盘,从应用程序对无人机进行手动导航。 | 无人机根据您触发的导航控制移动。如果启用了相机源(预览),也会更新。要增加应用程序中看到的预览窗口区域,您可以隐藏显示手动控制按钮的窗格。单击“显示控件”以禁用该窗格。您仍然可以使用键盘按键来控制无人机。 |
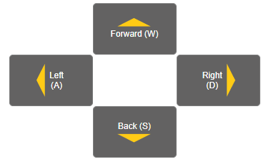
WASD 键:
W——前进
A – 向左移动
S – 向后移动
D——向右移动
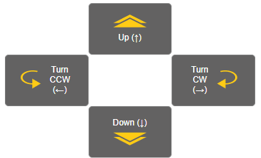
箭头键:
▲ – 向上移动无人机
▼ – 向下移动无人机
◄ – 逆时针转动无人机
► – 顺时针转动无人机
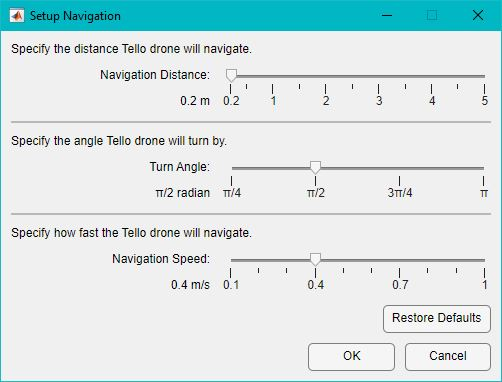
您可以更改每次触发沿特定方向移动时无人机使用的导航设置。单击“设置”可打开“设置导航”对话框,然后使用滑块指定距离、角度和速度值。如果要恢复默认值(导航距离:0.2m,转弯角度:π/2,导航速度:0.4m/s),在对话框中单击“恢复默认值” 。

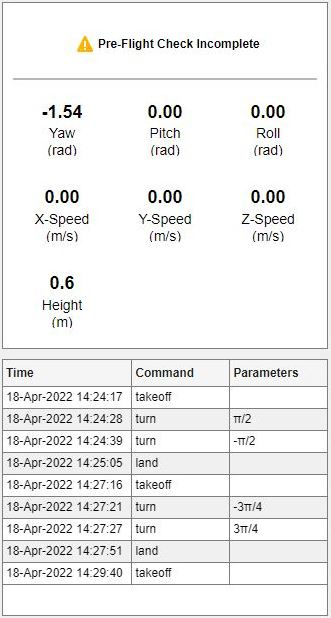
该应用程序还显示实时导航数据(由无人机传感器捕获)以及使用导航按钮或键盘按键触发的命令日志。此信息显示在右侧面板上。
Ryze Tello Navigator 可帮助您捕捉通过 Ryze Tello 无人机的 FPV 摄像头看到的图像并录制视频。
| 步 | 行动 | 结果 |
|---|---|---|
| 1 |  一次捕捉一张图像。 一次捕捉一张图像。 | 图像存储为工作区变量。 |
| 2 |  定义工作空间变量和录制视频的持续时间,然后单击录制视频。 定义工作空间变量和录制视频的持续时间,然后单击录制视频。 | 无人机摄像头的视频开始在指定的时间内录制。单击“停止”可在录制过程中随时停止录制,然后视频会自动以图像阵列形式保存在工作区中。 |
Ryze Tello Navigator 可帮助您生成所执行导航的实时编辑器脚本。您可以使用此脚本定义无人机的初始设置和飞行路径,然后添加自定义算法以执行其他工作流程。

为此,请在成功着陆无人机后单击“生成脚本” 。
| 警告 | 问题和建议的行动 |
|---|---|
| 电池电量低 | 如果剩余电量指示显示的值低于 20% 并且无人机正在飞行或悬停,应用程序将开始显示警告。如果电池电量低于 10%,无人机会自动从当前位置降落。为避免这种情况,请确保使用应用程序中的“着陆”按钮使无人机着陆,然后更换无人机的电池。 |
| 信号强度低 | 当无人机飞行时,该应用程序不断显示信号强度值。当信号强度低于20%时,建议您采取必要的措施,以免无人机失控。如果与无人机的连接丢失,则会出现一个对话框,显示与无人机重新连接的选项。如果仍然失败,则会显示错误消息。 |
许可证可在此 GitHub 存储库的 LICENSE.TXT 文件中找到。
MATLAB 中心
版权所有 2022 MathWorks, Inc.


