VERI-Wild:大型数据集和野外车辆重新识别的新方法

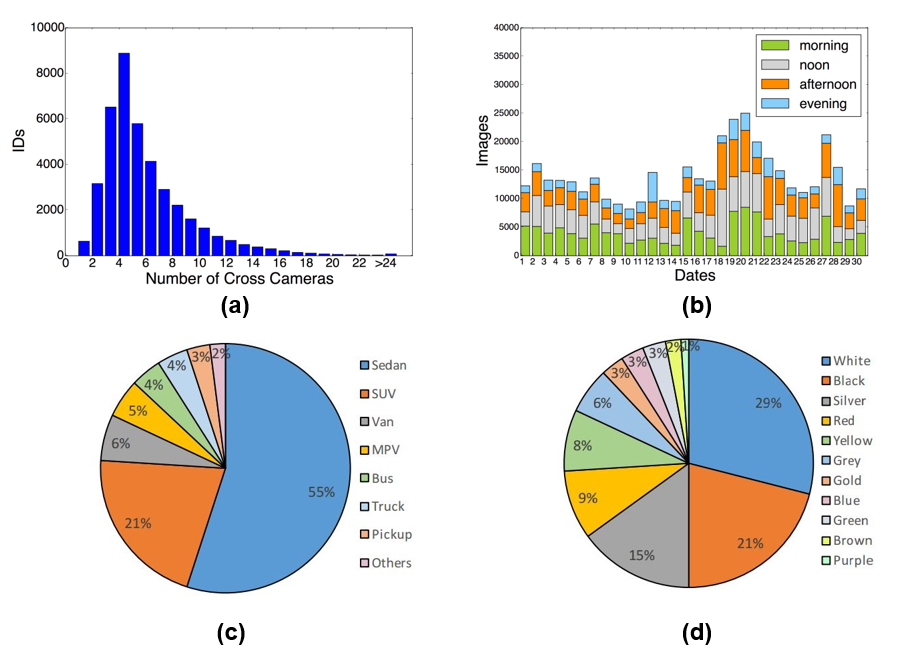
野外大规模车辆重识别数据集(VERI-Wild)是在不受约束的场景下,从由 174 个摄像机组成的大型闭路电视监控系统在一个月(30*24 小时)内捕获的。摄像机分布在200多平方公里的大城市区域。 YOLO-v2 [2] 用于检测车辆的边界框。原始车辆图像集包含1200万张车辆图像,邀请11名志愿者对数据集进行为期1个月的清理。经过数据清洗和标注,收集到40,671个身份的416,314张车辆图像。 VERI-Wild 的统计数据如图所示。出于隐私问题,车牌在数据集中被屏蔽。 VERI-Wild的显着特点概括为以下几个方面:
Unconstrained capture conditions in the wild VERI-Wild 数据集是从由 174 个监控摄像机组成的真实闭路电视摄像机系统收集的,其中无约束的图像捕捉条件带来了各种挑战。
Complex capture conditions 174个监控摄像头分布在200多平方公里的城区,呈现出各种背景、分辨率、视点、野外遮挡等情况。在极端情况下,一辆车会出现在 40 多个不同的摄像头中,这对 ReID 算法来说是一个挑战。
Large time span involving severe illumination and weather changes VERI-Wild 是从 125、280 (174x24x30) 小时的视频中收集的。图(b)给出了30天内24小时上午、中午、下午、晚上4个时段的车辆分布情况。 VERI-Wild还包含恶劣的天气条件,例如下雨、有雾等,这是以前的数据集中没有提供的。
Rich Context Information我们提供丰富的上下文信息,例如摄像机ID、时间戳、摄像机之间的跟踪关系,这些信息有可能促进摄像机网络中行为分析的研究,例如车辆行为建模、跨摄像机跟踪和基于图的检索。
重要的!!!!!!!!!
请注意,对于 VERI-Wild 测试集,给定查询图像,您需要删除图库集中与查询图像具有相同相机 id 和相同车辆 id 的图像。计算 mAP 和 CMC 时不考虑它们。
@inproceedings{lou2019large,
title={VERI-Wild: A Large Dataset and a New Method for Vehicle Re-Identification in the Wild},
author={Lou, Yihang and Bai, Yan and Liu, Jun and Wang, Shiqi and Duan, Ling-Yu},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
pages = {3235--3243},
year={2019}
}@inproceedings{lou2019large,
title={Disentangled Feature Learning Network and a Comprehensive Benchmark for Vehicle Re-Identification},
author={Bai, Yan and Liu, Jun and Lou, Yihang and Wang, Ce and Duan, Ling-Yu},
booktitle={In IEEE Transactions on Pattern Analysis and Machine Intelligence},
year={2021}
}白彦,Email:[email protected]
为了鼓励相关研究,我们将根据您的要求提供数据集。请将您的全名和单位通过电子邮件发送给联系人(yanbai at pku dot edu dot cn)。我们要求您提供信息只是为了确保数据集用于非商业目的。我们不会将其提供给任何第三方或在任何地方公开发布。由于隐私问题,我们将来不会提供车牌。如果您下载我们的数据集,则意味着您已同意我们电子邮件中的访问条款。
| 方法 | 小的 | 中等的 | 大的 | ||||||
| 地图 | 前1名 | 前5名 | 地图 | 前1名 | 前5名 | 地图 | 前1名 | 前5名 | |
| 谷歌网络[1] | 24.27 | 57.16 | 75.13 | 24.15 | 53.16 | 71.1 | 21.53 | 44.61 | 63.55 |
| FDA-Net(VGGM)[2] | 35.11 | 64.03 | 82.80 | 29.80 | 57.82 | 78.34 | 22.78 | 49.43 | 70.48 |
| MLSL[3] | 46.32 | - | - | 42.37 | - | - | 36.61 | - | - |
| 三元组(Resnet50) | 58.43 | 65.76 | 86.98 | 49.72 | 57.76 | 80.86 | 38.57 | 47.65 | 71.66 |
| FDA-Net(Resnet50)[2] | 61.57 | 73.62 | 91.23 | 52.69 | 64.29 | 85.39 | 45.78 | 58.76 | 80.97 |
| AAVER(Resnet50)[4] | 62.23 | 75.80 | 92.70 | 53.66 | 68.24 | 88.88 | 41.68 | 58.69 | 81.59 |
| DFLNet(Resnet50)[5] | 68.21 | 80.68 | 93.24 | 60.07 | 70.67 | 89.25 | 49.02 | 61.60 | 82.73 |
| BS(移动网络)[6] | 70.54 | 84.17 | 95.30 | 62.83 | 78.22 | 93.06 | 51.63 | 69.99 | 88.45 |
| UMTS(Resnet50)[7] | 72.7 | 84.5 | - | 66.1 | 79.3 | - | 54.2 | 72.8 | - |
| 强基线(Resnet50)[8] | 76.61 | 90.83 | 97.29 | 70.11 | 87.45 | 95.24 | 61.3 | 82.58 | 92.73 |
| HPGN(Resnet50+PGN)[9] | 80.42 | 91.37 | - | 75.17 | 88.21 | - | 65.04 | 82.68 | - |
| 魅力(Resnet50+PGN)[10] | 77.15 | 92.13 | 97.43 | - | - | - | - | - | - |
| PVEN(Resnet50)[12] | 79.8 | 94.01 | 98.06 | 73.9 | 92.03 | 97.15 | 66.2 | 88.62 | 95.31 |
| 保存器(Resnet50)[11] | 80.9 | 93.78 | 97.93 | 75.3 | 92.7 | 97.48 | 67.7 | 89.5 | 95.8 |
| DFNet(Resnet50)[14] | 83.09 | 94.79 | 98.05 | 77.27 | 93.22 | 97.46 | 69.85 | 89.38 | 96.03 |
| 方法 | 全部测试集 | 测试装置A | 测试集B | ||||||
| 地图 | 前1名 | 前5名 | 地图 | 前1名 | 前5名 | 地图 | 前1名 | 前5名 | |
| 强基线 (Resnet50) [8] | 34.71 | 54.37 | 63.99 | 32.75 | 40.12 | 52.18 | 42.25 | 82.72 | 90.67 |
| GSTE (Resnet50)(带技巧袋)[13] | 32.57 | 59.25 | 64.48 | 33.01 | 47.54 | 50.81 | 41.82 | 86.08 | 91.43 |
| FDA-Net (Resnet50)(带有技巧袋)[2] | 34.21 | 57.32 | 64.90 | 34.63 | 45.53 | 52.77 | 3.93 | 84.78 | 92.47 |
| 曾经(Resnet50)[41] | 36.8 | 59.1 | 67.6 | 36.8 | 48.7 | 57.3 | 45.4 | 86.1 | 94.3 |
| PVEN(Resnet50)[12] | 37.15 | 61.19 | 68.63 | 38.77 | 51.28 | 59.32 | 45.48 | 88.05 | 94.35 |
| 保存器(Resnet50)[11] | 38.0 | 62.1 | 69.50 | 39.2 | 52.3 | 60.2 | 45.1 | 88.1 | 94.1 |
| DFNet(Resnet50)[14] | 39.84 | 62.21 | 68.90 | 40.39 | 51.68 | 60.51 | 46.13 | 88.56 | 94.17 |
[1] Yang, L., Luo, P., Change Loy, C., Tang, X.:用于细粒度分类和验证的大规模汽车数据集。见:IEEE 计算机视觉和模式识别会议。 (2015)
[2] Lou, Y., Bai, Y., Liu, J., Wang, S., Duan, L.: Veri-wild: 野外车辆重识别的大数据集和新方法。见:IEEE 计算机视觉和模式识别会议。 (2019)
[3] Alfasly,S.,Hu,Y.,Li,H.,Liang,T.,Jin,X.,Liu,B.,Zhao,Q.:基于多标签的相似性学习用于车辆重新识别。 IEEE Access7(2019)
[4] Pirazh, K.、Kumar, A.、Peri, N. 等人:用于车辆重新识别的具有自适应注意力的双路径模型。见:IEEE计算机视觉国际会议(2019)
[5] Yan Bai,Yihang Lou,Yongxing Dai,等:用于车辆重识别的解缠结特征学习网络。于:IJCAI 2020
[6] Kuma Ratnesh 和 Weill Edwin 等人:车辆重新识别:使用三元组嵌入的有效基线。在 IJCNN 2019
[7] 金鑫,兰翠玲,曾文军,陈志博:基于图像的物体重识别的不确定性感知多镜头知识蒸馏。于:AAAI 2020
[8] 罗浩、顾友志等:Bag of Tricks and a Strong Baseline for Deep Person Re-Identification. 2019 年 CVPR 研讨会。
[9] 沉飞,朱建清等:通过混合金字塔图网络探索车辆重识别的空间意义。在 arXiv 预印本 arXiv:2005.14684
[10] Abhijit Suprem 和 Calton Pu:看起来很迷人:具有全局和本地关注的异构相机网络中的车辆重新识别。在 arXiv 预印本 arXiv:2002.02256
[11] Khorramshahi Pirazh、Peri Neehar、陈俊成、Chellappa Rama:魔鬼藏在细节中:车辆重新识别的自我监督注意力。在 2020 年 ECCV 中
[12] 孟德超,等。 “用于车辆重新识别的基于解析的视图感知嵌入网络。” IEEE/CVF 计算机视觉和模式识别会议论文集。 2020.
[13]白彦,楼一航,高峰,王世奇,吴宇伟,段凌宇。用于车辆重新识别的组敏感三元组嵌入。 IEEE 多媒体汇刊,2018 年。
[14]白岩,刘军,楼一航,王策,段凌宇。解开的特征学习网络和车辆重新识别的综合基准。特帕米 2021。


