ReturnVisitRobot
1.0.0
这是一个用于保险回访的外呼机器人,本项目中只保留核心的文本机器人的部分。 核心功能流程如下:
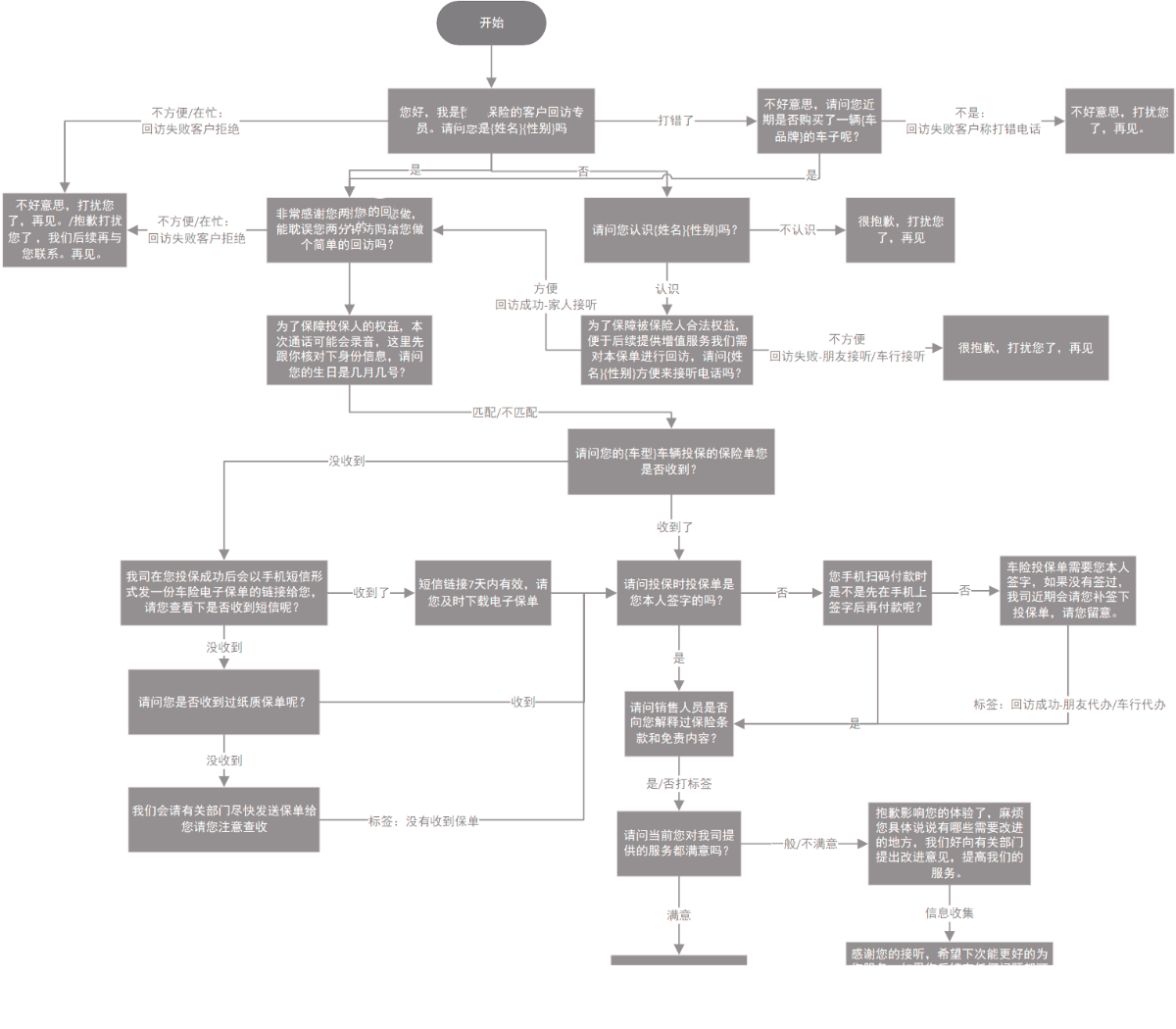
本项目基于rasa重写了基于有限状态机的对话响应策略,对想要搭建文本机器人的朋友,应该有一定参考意义。
配置,可修改confg.yml文件中的pipeline,pipeline的具体配置方法可以参考Rasa官网https://rasa.com/docs/rasa/model-configuration
下面给出两个自定义组件的配置示例
基于记忆性对话响应策略
policies:
- name: policy.memoization.MemoizationPolicy
- name: TEDPolicy
max_history: 20
epochs: 15
batch_size: 50
- name: RulePolicy
core_fallback_threshold: 0.3
enable_fallback_prediction: True
core_fallback_action_name: "action_default_fallback"
或者基于有限状态机(FSM)
policies:
- name: policy.fsm_policy.FsmPolicy
- name: TEDPolicy
max_history: 20
epochs: 15
batch_size: 50
- name: RulePolicy
core_fallback_threshold: 0.3
enable_fallback_prediction: True
core_fallback_action_name: "action_default_fallback"
训练
python main.py train
运行
#开启动作响应服务器,默认5055端口
python main.py run actions
#开启对话shell,如果使用pycharm注意勾选emulate terminal
python main.py shell
#第一句请输入内置意图:开始
Your input:开始
six~=1.16.0
rasa~=3.1.0
zlib~=1.2.12
tqdm~=4.64.0
pip install -r requirements.txt
rasa run -m xx.tar.gz(模型文件) -p 8787(端口号)


