TransPose
Yaml
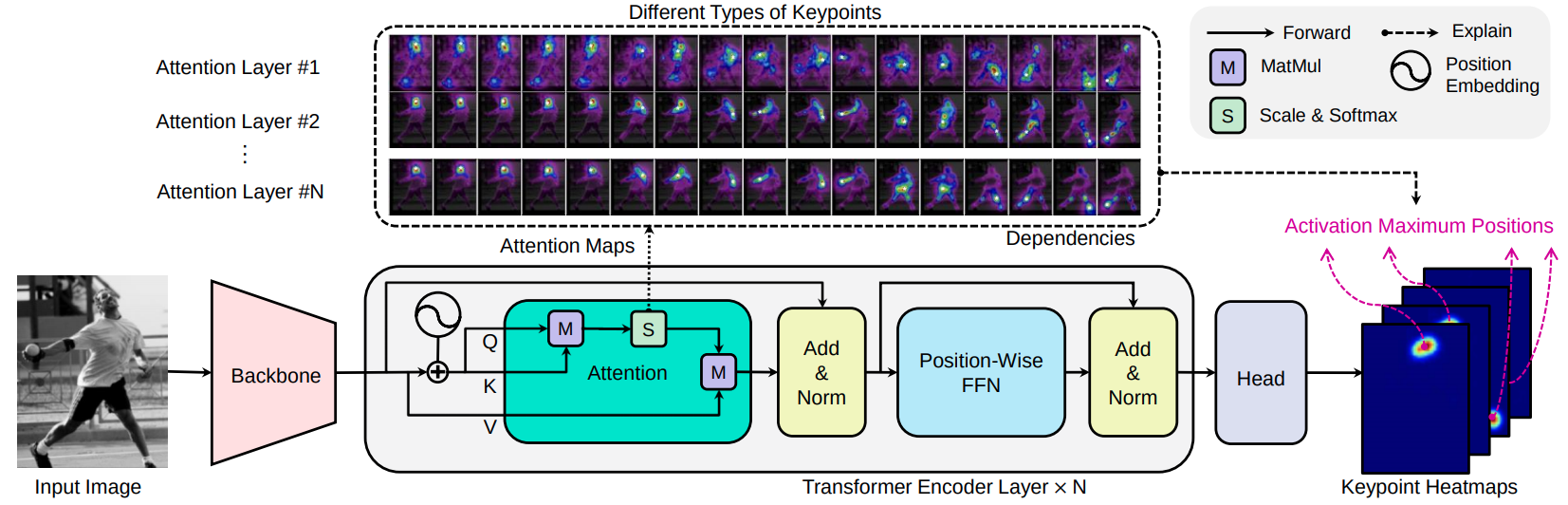
转置是基于CNN特征提取器,变压器编码器和预测头的人姿势估计模型。给定图像,在变压器内置的注意力层可以有效地捕获关键点之间的长距离空间关系,并解释高度依赖的预测关键位置的依赖性。
[Arxiv 2012.14214] [纸] [示例注释]
转置:通过变压器,Sen Yang,Zhibin Quan,Mu Nie,Wankou Yang,ICCV 2021的键盘定位
我们选择两种类型的CNN作为骨干候选者:Resnet和hrnet。派生的卷积块是Resnet-Small,Hrnet-Small-W32和Hrnet-Small-W48。
| 模型 | 骨干 | #注意层 | d | h | #heads | #params | AP(可可Val GT Bbox) | 下载 |
|---|---|---|---|---|---|---|---|---|
| tranpose-r-a3 | Resnet-s | 3 | 256 | 1024 | 8 | 5.2MB | 73.8 | 模型 |
| tranpose-r-a4 | Resnet-s | 4 | 256 | 1024 | 8 | 6.0MB | 75.1 | 模型 |
| 转置HS | HRNET-S-W32 | 4 | 64 | 128 | 1 | 8.0MB | 76.1 | 模型 |
| 转置-H-A4 | HRNET-S-W48 | 4 | 96 | 192 | 1 | 17.3MB | 77.5 | 模型 |
| 转置-H-A6 | HRNET-S-W48 | 6 | 96 | 192 | 1 | 17.5MB | 78.1 | 模型 |
尝试网络演示:
您可以直接从Torch Hub上直接加载带有验证的COCO Train2017数据集上的转置R-A4或转置-H-A4模型,仅通过:
import torch
tpr = torch . hub . load ( 'yangsenius/TransPose:main' , 'tpr_a4_256x192' , pretrained = True )
tph = torch . hub . load ( 'yangsenius/TransPose:main' , 'tph_a4_256x192' , pretrained = True )| 模型 | 输入大小 | FPS* | gflops | AP | AP .5 | AP .75 | AP(M) | AP(L) | ar | AR .5 | AR .75 | 手臂) | AR(L) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| tranpose-r-a3 | 256x192 | 141 | 8.0 | 0.717 | 0.889 | 0.788 | 0.680 | 0.786 | 0.771 | 0.930 | 0.836 | 0.727 | 0.835 |
| tranpose-r-a4 | 256x192 | 138 | 8.9 | 0.726 | 0.891 | 0.799 | 0.688 | 0.798 | 0.780 | 0.931 | 0.845 | 0.735 | 0.844 |
| 转置HS | 256x192 | 45 | 10.2 | 0.742 | 0.896 | 0.808 | 0.706 | 0.810 | 0.795 | 0.935 | 0.855 | 0.752 | 0.856 |
| 转置-H-A4 | 256x192 | 41 | 17.5 | 0.753 | 0.900 | 0.818 | 0.717 | 0.821 | 0.803 | 0.939 | 0.861 | 0.761 | 0.865 |
| 转置-H-A6 | 256x192 | 38 | 21.8 | 0.758 | 0.901 | 0.821 | 0.719 | 0.828 | 0.808 | 0.939 | 0.864 | 0.764 | 0.872 |
笔记:
| 模型 | 输入大小 | #params | gflops | AP | AP .5 | AP .75 | AP(M) | AP(L) | ar | AR .5 | AR .75 | 手臂) | AR(L) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 转置HS | 256x192 | 8.0m | 10.2 | 0.734 | 0.916 | 0.811 | 0.701 | 0.793 | 0.786 | 0.950 | 0.856 | 0.745 | 0.843 |
| 转置-H-A4 | 256x192 | 173m | 17.5 | 0.747 | 0.919 | 0.822 | 0.714 | 0.807 | 0.799 | 0.953 | 0.866 | 0.758 | 0.854 |
| 转置-H-A6 | 256x192 | 175m | 21.8 | 0.750 | 0.922 | 0.823 | 0.713 | 0.811 | 0.801 | 0.954 | 0.867 | 0.759 | 0.859 |
Jupyter笔记本演示
在给定输入图像,预验证的转置模型和预测的位置,我们可以可视化注意分数的阈值预测位置的空间依赖性。
threshold=0.00的TransPose-R-A4 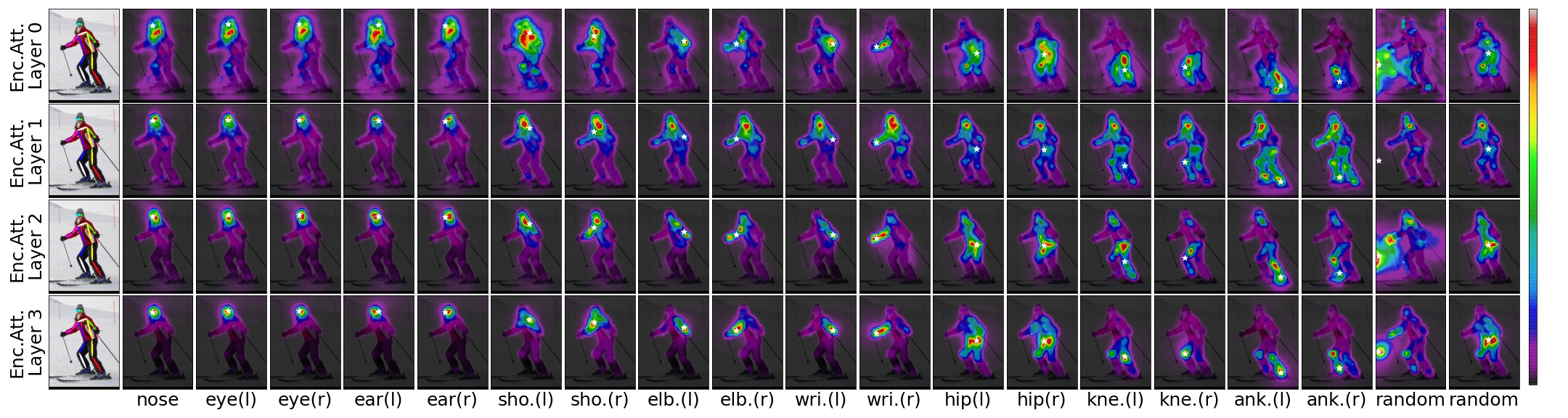
threshold=0.01的TransPose-R-A4 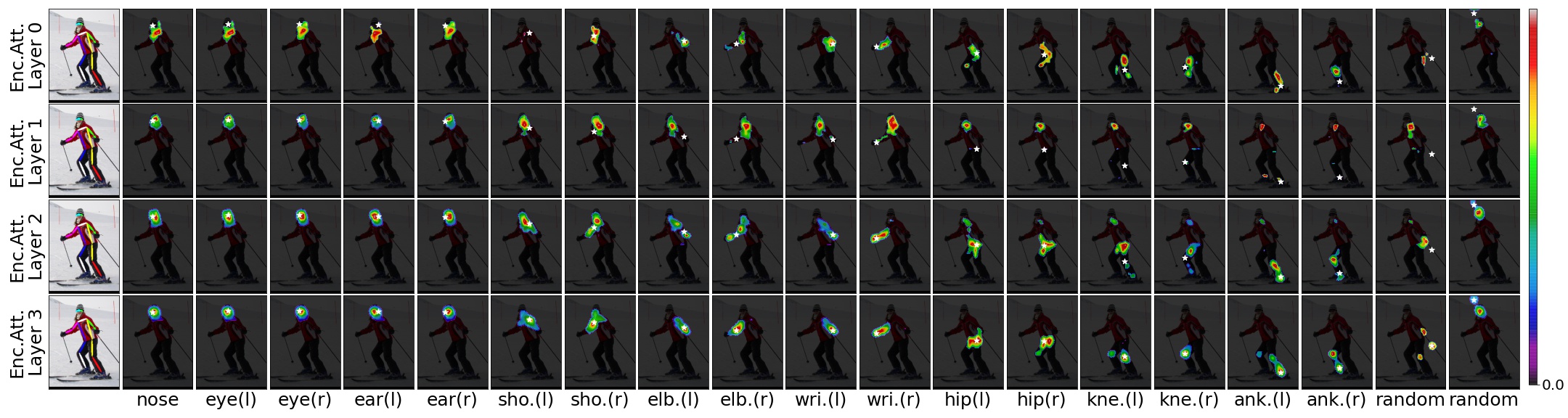
threshold=0.00的TransPose-H-A4 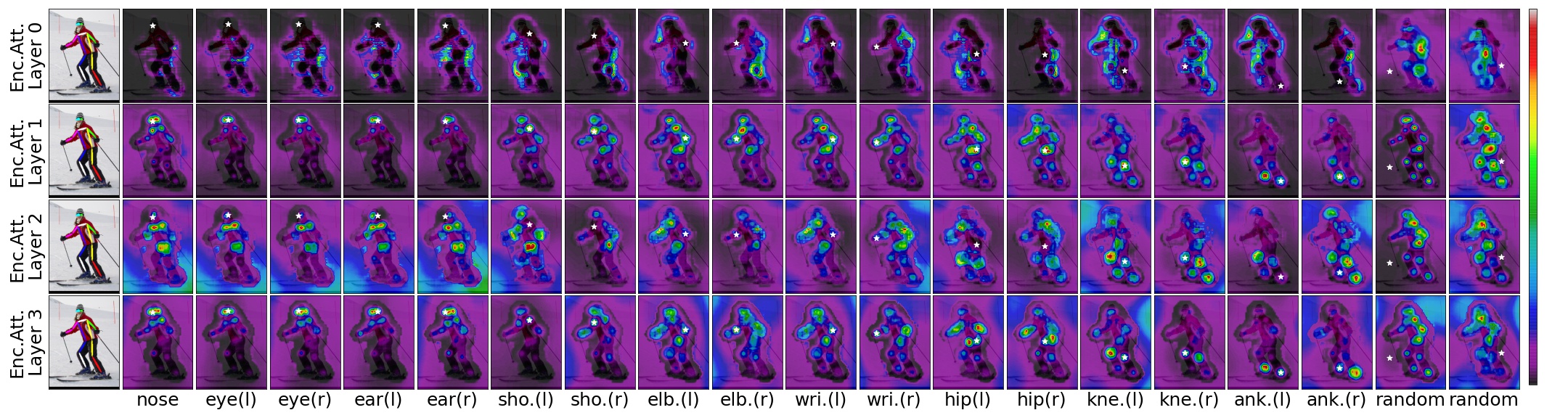
threshold=0.00075的TransPose-H-A4 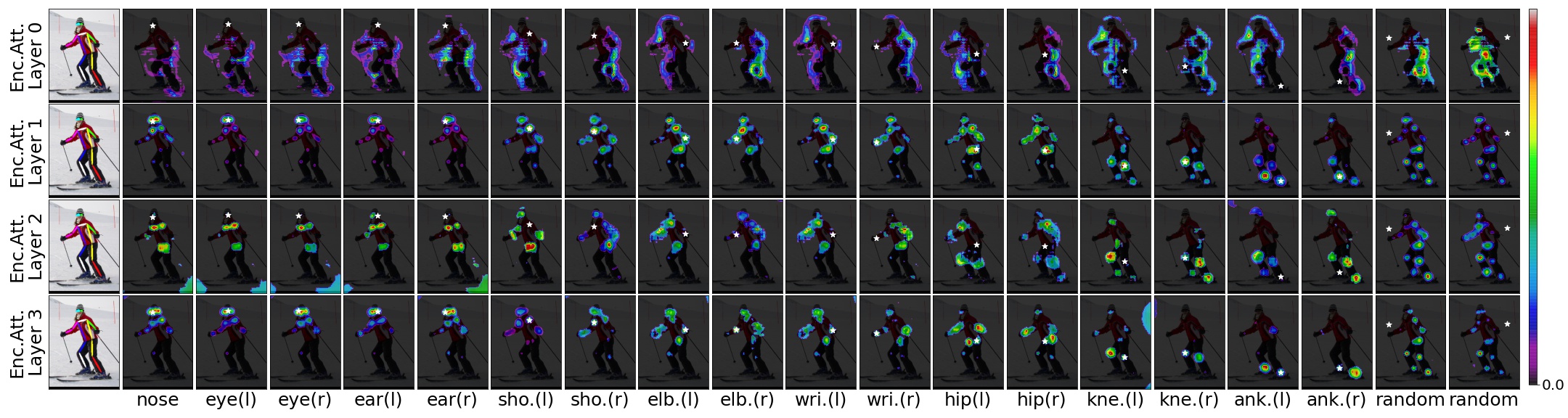
克隆此存储库,我们将其称为您将您克隆为$ {pose_root}的目录
git clone https://github.com/yangsenius/TransPose.git在Pytorch官方网站上安装Pytorch> = 1.6和Torchvision> = 0.7
安装软件包依赖项。确保Python环境> = 3.7
pip install -r requirements.txt在$ {pose_root}下制作输出(培训模型和文件)和日志(张板日志)目录
mkdir output log
cd ${POSE_ROOT} /lib
make从此存储库的发行版中下载验证的模型到指定目录
$ {POSE_ROOT}
`-- models
`-- pytorch
|-- imagenet
| |-- hrnet_w32-36af842e.pth
| |-- hrnet_w48-8ef0771d.pth
| |-- resnet50-19c8e357.pth
|-- transpose_coco
| |-- tp_r_256x192_enc3_d256_h1024_mh8.pth
| |-- tp_r_256x192_enc4_d256_h1024_mh8.pth
| |-- tp_h_32_256x192_enc4_d64_h128_mh1.pth
| |-- tp_h_48_256x192_enc4_d96_h192_mh1.pth
| |-- tp_h_48_256x192_enc6_d96_h192_mh1.pth 我们遵循HRNET的步骤,准备可可列车/val/test数据集和注释。检测到的结果将从OneDrive或Googledrive下载。请下载或将它们链接到$ {pose_root}/data/coco/,并使它们看起来像这样:
$ {POSE_ROOT}/data/coco/
| -- annotations
| |-- person_keypoints_train2017.json
| `-- person_keypoints_val2017.json
| -- person_detection_results
| |-- COCO_val2017_detections_AP_H_56_person.json
| `-- COCO_test-dev2017_detections_AP_H_609_person.json
`-- images
|-- train2017
| |-- 000000000009.jpg
| |-- ...
`-- val2017
|-- 000000000139.jpg
|-- ... python tools/test.py --cfg experiments/coco/transpose_r/TP_R_256x192_d256_h1024_enc4_mh8.yaml TEST.USE_GT_BBOX Truepython tools/train.py --cfg experiments/coco/transpose_r/TP_R_256x192_d256_h1024_enc4_mh8.yaml非常感谢这些论文及其开源代码:hrnet,detr,darkpose
该存储库是根据MIT许可发布的。
如果您觉得这个存储库有用,请给它一颗星吗?或考虑引用我们的工作:
@inproceedings{yang2021transpose,
title={TransPose: Keypoint Localization via Transformer},
author={Yang, Sen and Quan, Zhibin and Nie, Mu and Yang, Wankou},
booktitle={IEEE/CVF International Conference on Computer Vision (ICCV)},
year={2021}
}

