Event Beacon Communication
1.0.0
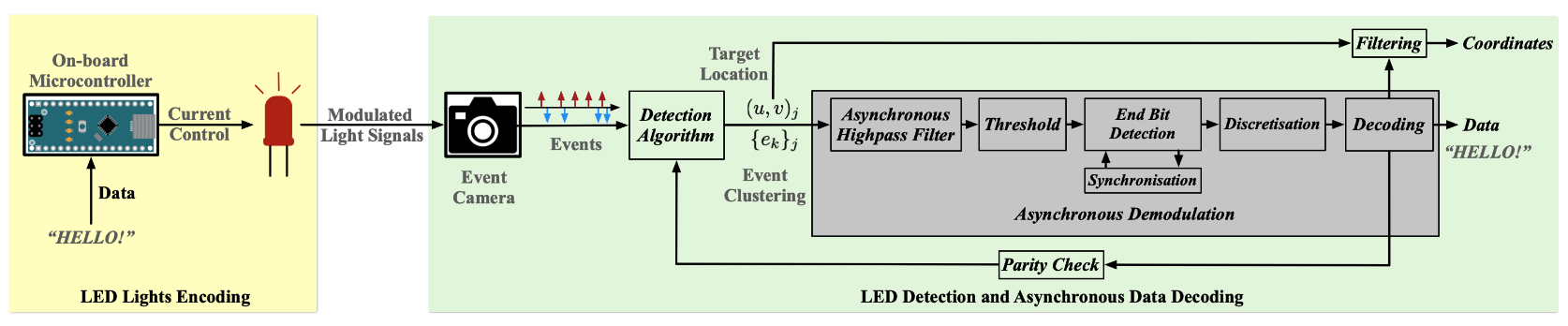
事件摄像机是由生物启发的动态视觉传感器,它们以高时间分辨率,高动态范围和低延迟响应图像强度的变化。这些传感器特性非常适合与智能视觉信标的广播视觉通信通道一起启用视觉目标跟踪,并在分布式机器人中应用。视觉信标可以通过光发射二极管(LED)的高频调制(例如车辆前大灯,物联网(IoT)LED,智能建筑灯等)来构建,这些灯光(IoT),智能建筑灯等在许多真实世界中都已经存在。事件摄像机的高时间分辨率特征使他们能够以基于经典的框架相比,以更高的数据速率捕获视觉信号。在本文中,我们提出了一种具有LED调制和事件摄像头解调算法的新型智能视觉信标体系结构。我们定量评估了我们原型的智能视觉信标通信系统的LED传输速率,通信距离和消息传输精度之间的关系。所提出的方法在室内环境中最多可实现4 kbps,并且在100米的距离内,以500 bps的距离达到了无损的传播,在阳光充足的情况下,表明了该技术在室外环境中的潜力。
Ziwei Wang,Yonhon NG,Jack Henderson和Robert Mahony
该论文被日本京都的IEEE国际智能机器人与系统国际会议(IROS 2022)接受。
[会议论文] [Arxiv预印本]
如果您使用或讨论我们的算法或数据集,请引用我们的论文如下:
@inproceedings {wang22iros,
作者= {Ziwei Wang和Yonhon Ng和Jack Henderson和Robert Mahony},
title = {使用事件摄像机的异步光学通信的智能视觉信标},
BookTitle = {“国际智能机器人和系统会议(IROS 2022)”},
年= {2022}
}
运行decoder.m ,它将从./data加载事件数据。解码代码decoder.m输出解码的消息和准确率(消息准确率和位准确率)。
如果您有任何疑问或建议,请随时与[email protected]联系


