usb ptt arduino nano every
1.0.0
控制Flex Radio 6XXX/8XXX无线电推动与SmartCat进行交谈(PTT),使用Arduino Nano每个人将CAT命令发送到无线电。
利用flex无线电智能猫连接到arduino nano的每个微控制器连接到开关(即,脚开关)。抑制开关将发送一个mox,并在释放时,将mox Off命令发送到收音机。
用arduino IDE加载草图。
将创建一个COM端口。注意配置和测试的数字。
Arduino Nano每个草图访问计时器都是默认设置(50ms)。如有必要,可以调整这一点。
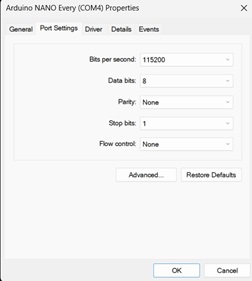
USB端口速度设置为115200。确保设备管理器中的USB设备设置为115200。
可以使用Arduino IDE串行绿色或终端模拟器(即,腻子)进行测试。
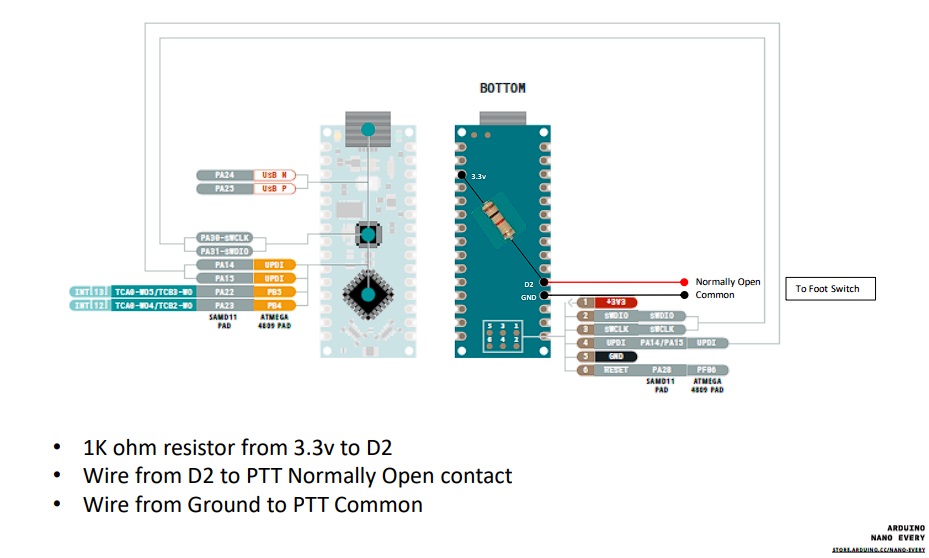
使用引脚D2并在Arduino Nano上接地,以连接到脚步开关。使用Arduino Nano每个引脚供参考。
1K电阻器用作从3.3V引脚到D2引脚的上拉电阻。
将引脚D2连接到脚开关上的正常开放端子。
将纳米上的接地销接线到地面或开关上的常见端子。
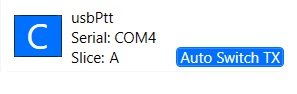
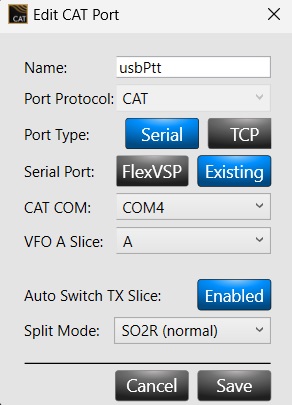
使用每个COM端口的Arduino Nano创建SmartCat串行端口,用于USB脚开关。
{
“名称”:“ USBPTT”,
“协议”:“猫”,
“端口类型”:“序列”,
“串行端口”:“现有”,
“ CAT COM”:“使用为Arduino Nano创建的新端口
}
将脚步开关连接到计算机,并通过收音机进行测试。在SmartCat上使用日志记录功能进行测试。
示例CAT命令打开Mox:
2024-10-01 14:24:15.328 COM4 [RCVD]:ZZ
2024-10-01 14:24:15.331 COM4 [RCVD]:TX1;
示例CAT命令关闭Mox:
2024-10-01 14:24:15.707 COM4 [RCVD]:ZZ
2024-10-01 14:24:15.709 COM4 [RCVD]:TX0;
ZZTX0;
圈长Aquiline脚开关,带有嵌入式Arudino Nano 



