jetson nano baseboard
v1.4.6
版权(C)2020-2024 Antmicro

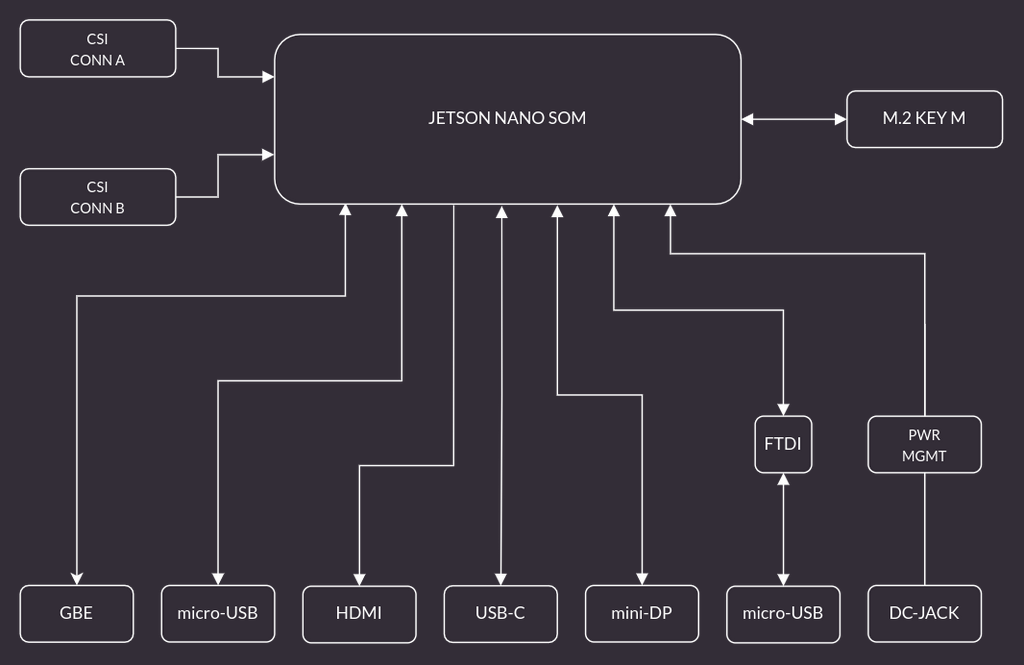
该项目包含用于支持NVIDIA JETSON NANO,XAVIER NX和TX2 NX SOM的打开硬件设计文件。它是由自定义硬件,软件和AI工程公司和NVIDIA的Jetson生态系统合作伙伴Antmicro创建的。板可以通过统一的柔性平板电缆(FFC)连接器与MIPI CSI-2视频设备连接,可在2车道配置或3个传感器中以4车道配置为4个传感器提供支持。有关支持的CSI车道映射的更多详细信息,请参阅“产品设计指南”。您将在NVIDIA的Jetson下载中心找到与SOM相关的资源。
踢脚板,其根据客户规格设计的自定义变体,以及可以从功能强大的机器人组件购买的必需配件。
该项目的设计文件从Rev. 1.5开始,并在KICAD中提供并维护。董事会的较旧修订是在Altium Designer准备的,并保留在一个单独的分支上。
主要目录包含KICAD设计文件,许可证和读数。其余文件存储在以下目录中:
img包含此读数的图形doc - 包含生成的原理图和其他文档linux-patches包含补丁,这些补丁增加了来自Allied Vision的相机模块的相机支持(请参见下面的BSP部分) 可以使用提供的设计文件制作和组装板。请查看机械层,以获取有关建议用于制造的PCB堆栈的更多信息。板可以在6-36VDC范围内通过电压供电。建议使用12V 2A直流电源为董事会供电。板有一个集成的电源音序器,该序列器在应用电源后立即自动启动模块。
NVIDIA为Jetson Nano / Xavier NX / TX2 NX提供了标准Linux(L4T)BSP的标准Linux(L4T)BSP的支持。 BSP应与开箱即用的开源Jetson踢脚线一起使用。但是,要与各种摄像头和其他配件一起使用底板,您可能需要进行修改。如果您打算将板与Allied Vision Alvium图像传感器一起使用,则有一个linux-patches目录,其中包含补丁文件,其中添加了使用Jetson Nano NX模块的盟军视觉摄像头的支持。贴片用L4T释放命名,可以应用于Allied Vision发布的Linux存储库的相应分支。 Antmicro的服务涉及BSP开发,因此您可以雇用我们为您进行必要的修改。
您可以使用USB OTG接口连接器将BSP图像上传到插入板板中的SOM。
大多数调试消息都是通过串行控制台提供的。该板包括一个FTDI芯片,可为主机PC提供UART接口。有关更多详细信息,请参考示意图。默认的调试UART通道可以通过/dev/ttyUSB0访问(假设没有其他FTDI单元连接到您的PC)。串行调试连接的默认波特rate是115200波特,带有8位传输,1个停止位,没有流量控制。
董事会的最新修订(1.5.x)包括转换为KICAD的设计文件。 BOM已被更改,因此尽管存在全球芯片短缺情况,董事会仍可以生产。修订版1.5.x更改用于处理摄像机和视频配件的I2C多路复用器(PCA9548-> PCA9547)。您可能需要调整视频配件的Devicetree条目,以使它们与新的I2C多路复用器芯片一起使用。
该项目已根据APACHE-2.0许可获得许可。


