SquawkersMcGraw
1.0.0
逆向工程和混合孩之宝犁地朋友“ Squawkers McGraw” Animatronic Parrot 
 |  |  |
有多种开关和传感器输入,如下:
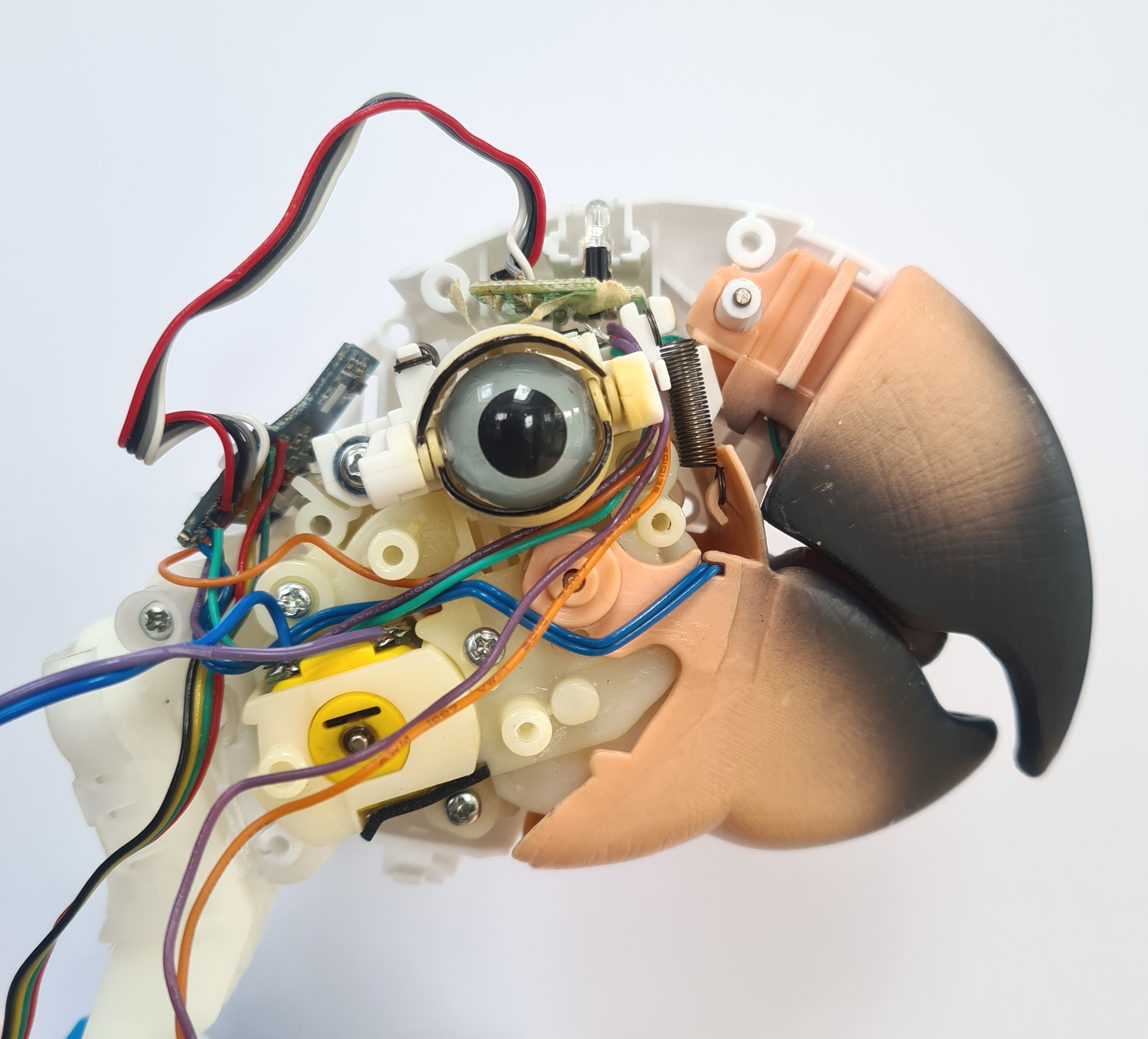
所有动作仅通过两个DC爱好电动机控制。通过使用巧妙的凸轮系统,反转电动机的方向可以触发不同的执行器。

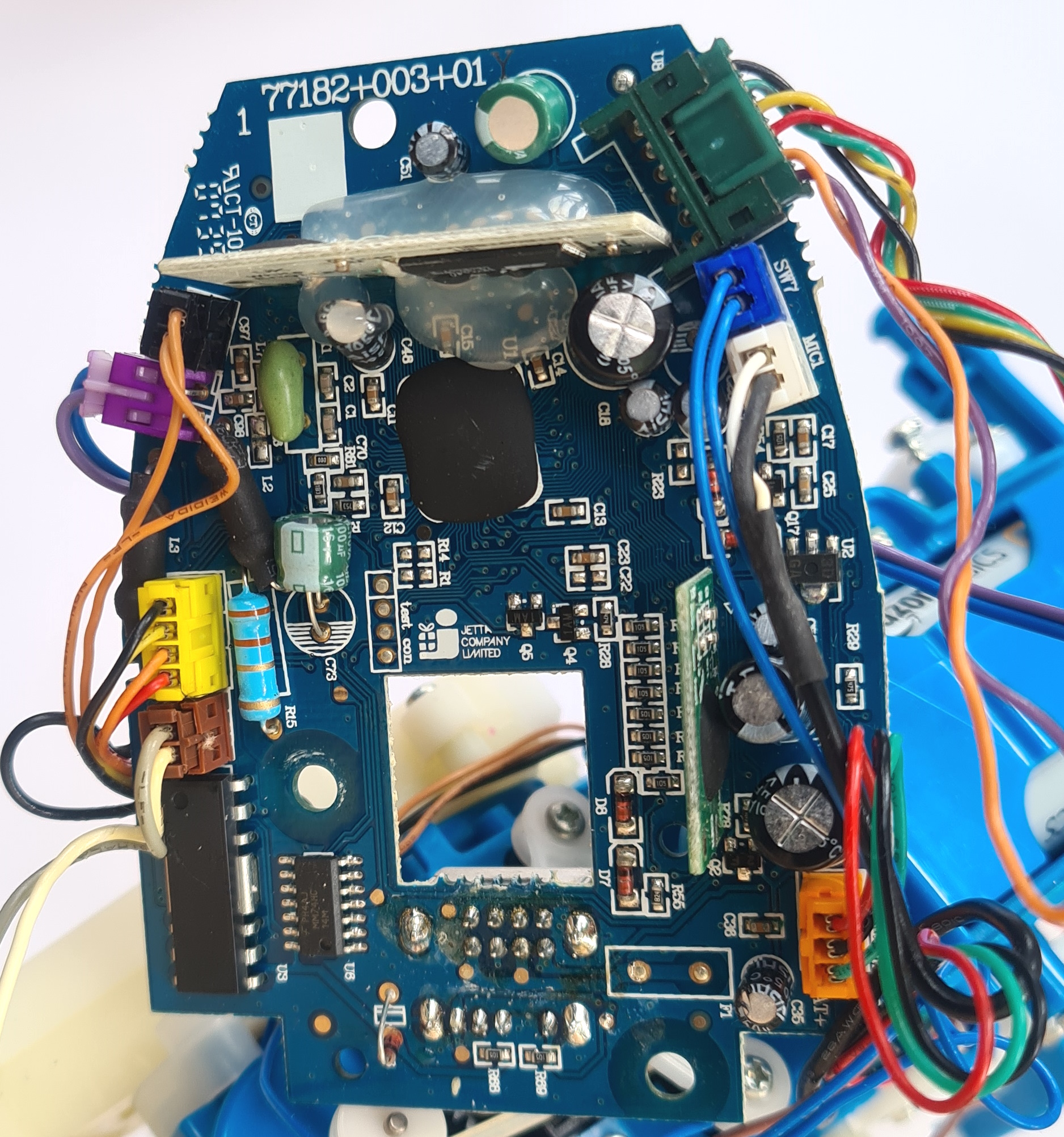
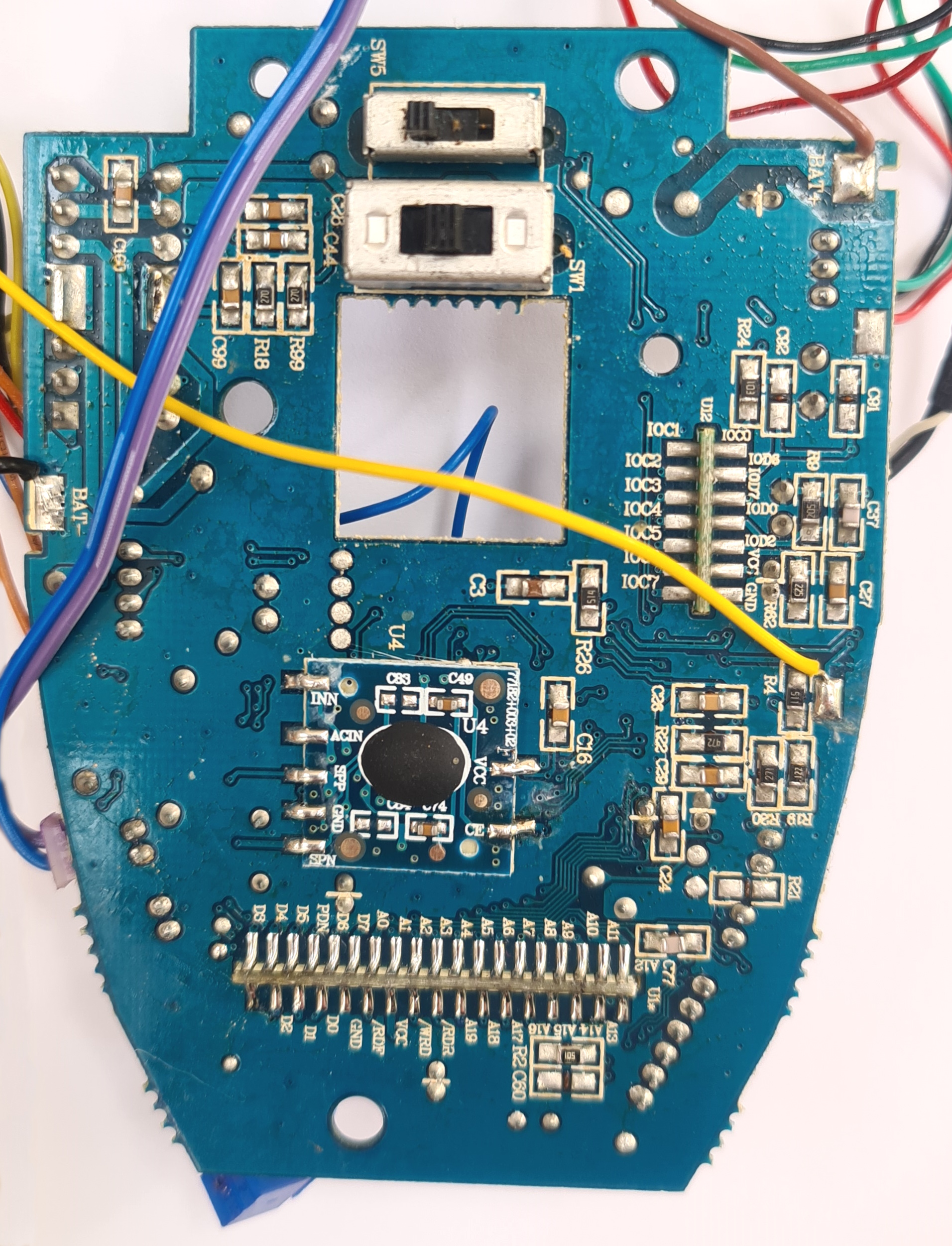
控制器具有三个位置开关,三个播放模式按钮,6个程序按钮和一个自定义记录按钮。它似乎使用常见的38kHz载波频率广播命令字符串。对于控制Squawkers McGraw的非破坏性方法,您可以简单地传输这些相同的命令代码以触发任何内置行为。
使用Arduino和红外信号分析仪代码抓住以下命令字符串,上述
// Repeat Button
unsigned int repeatData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000,2000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000,2000,1000,2000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,1000,2000,1000};
// Custom Record
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
// Repeat Button (same for Command and Gags)
unsigned int repeatData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1100,2000,2000,1000,1000,2000,2000,1000,1100,2000,2000,1000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000,2000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000,1000};
// Custom Record [same as Response]
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
// Repeat Button (same for Command and Gags)
unsigned int repeatData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,2000,1000,1100,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
// Custom Record
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
要完全自定义鹦鹉的行为需要更具破坏性的修改 - 打破与控制板的连接,而是将输入和输出接线到处理器,例如Arduino,如下:
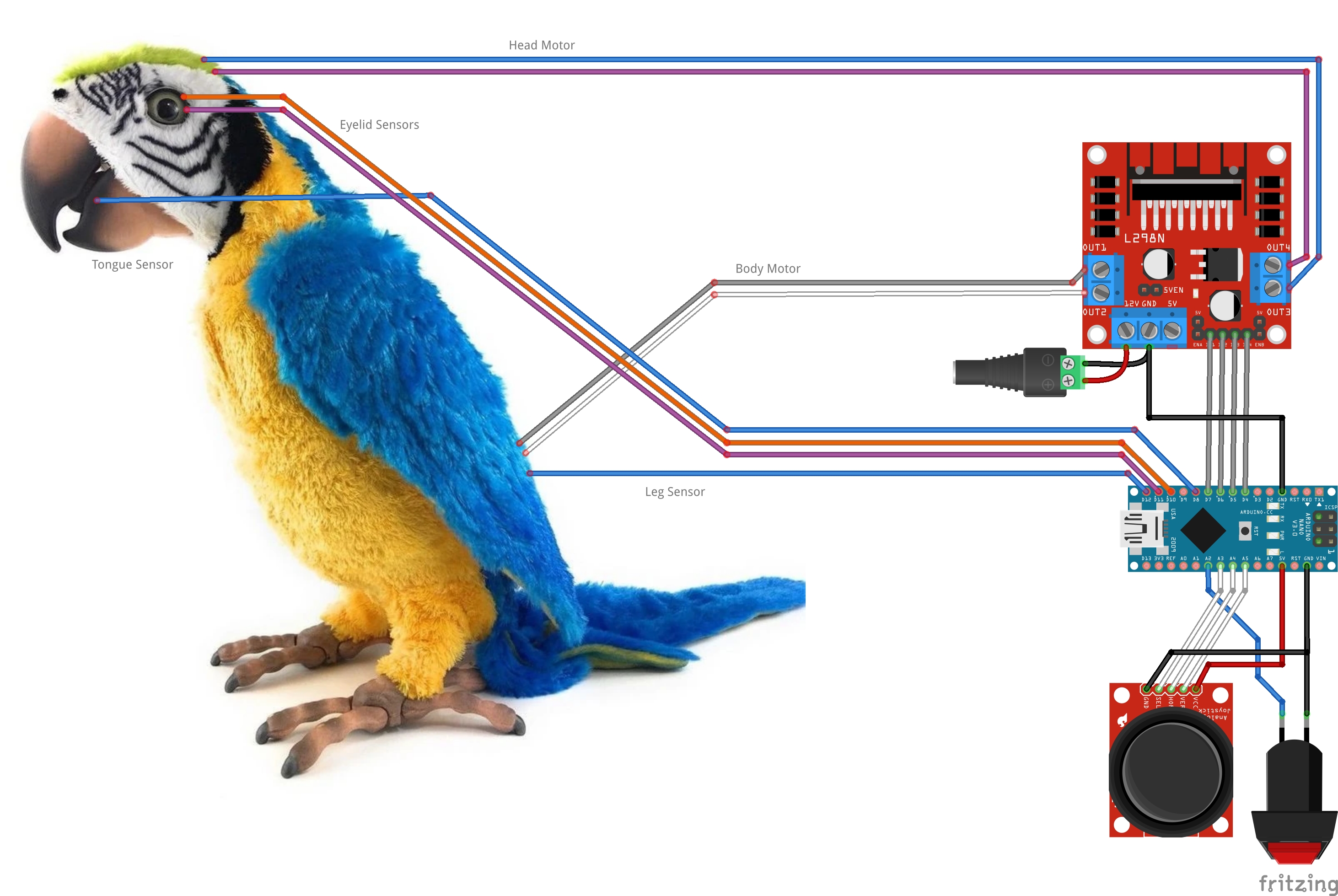
请注意,所示的每个传感器实际上都由一对电线组成 - 一条输入信号和一根接地线(控制器具有在未触发输入时的板上Input_pullups)。在此存储库中的Arduino .ino草图中演示了用于控制此类修改控制器的代码。


