ROScribe
v0.0.4
使用LLMS创建ROS软件包。
Roscribe使用自然语言界面来描述机器人项目,消除了将ROS用于初学者的技能障碍,并为熟练的工程师节省了时间和麻烦。 Roscribe结合了大语言模型(LLM)的纯粹功能和灵活性以及及时的调整技术,以捕获机器人设计的详细信息,并自动为您的项目创建整个ROS包装。
Roscribe通过代理多步进方法构建了整个ROS工作区,每个步骤都集中在机器人软件设计的一个特定方面。特别是,Roscribe可以帮助您完成以下步骤:
如果您是ROS的新手,Roscribe将是您的机器人(ICS)导师?
如果您是经验丰富的ROS用户,Roscribe可以帮助您为您的ROS包装创建蓝图吗?测
Roscribe由4个代理组成。下面的列表详细介绍了每个代理的责任,如互动顺序所示:
SpecAgent :帮助您项目的整体骨架。用ROS术语,它构建了您的项目的ROS图,在该图中,图形的每个部分都可以从开源式重新安装中进行AI生成或拉出。GenAgent :鉴于ROS图,该代理生成了Python中每个ROS节点的ROS工作区和代码。另外,它可以下载ROS节点的开源实现。PackAgent :在了解生成的ROS工作区的知识中,该代理会创建一个ROS启动文件,从而带有ROS节点。此外,该代理人生成了package.xml , CMakeLists.txt和README.md文件。SupportAgent :这是您的客户支持代理,在运行项目期间遇到错误时,可以为您提供帮助。代理已经可以访问项目的布局,并且可以内部读取生成的文件。下图说明了Roscribe的体系结构: 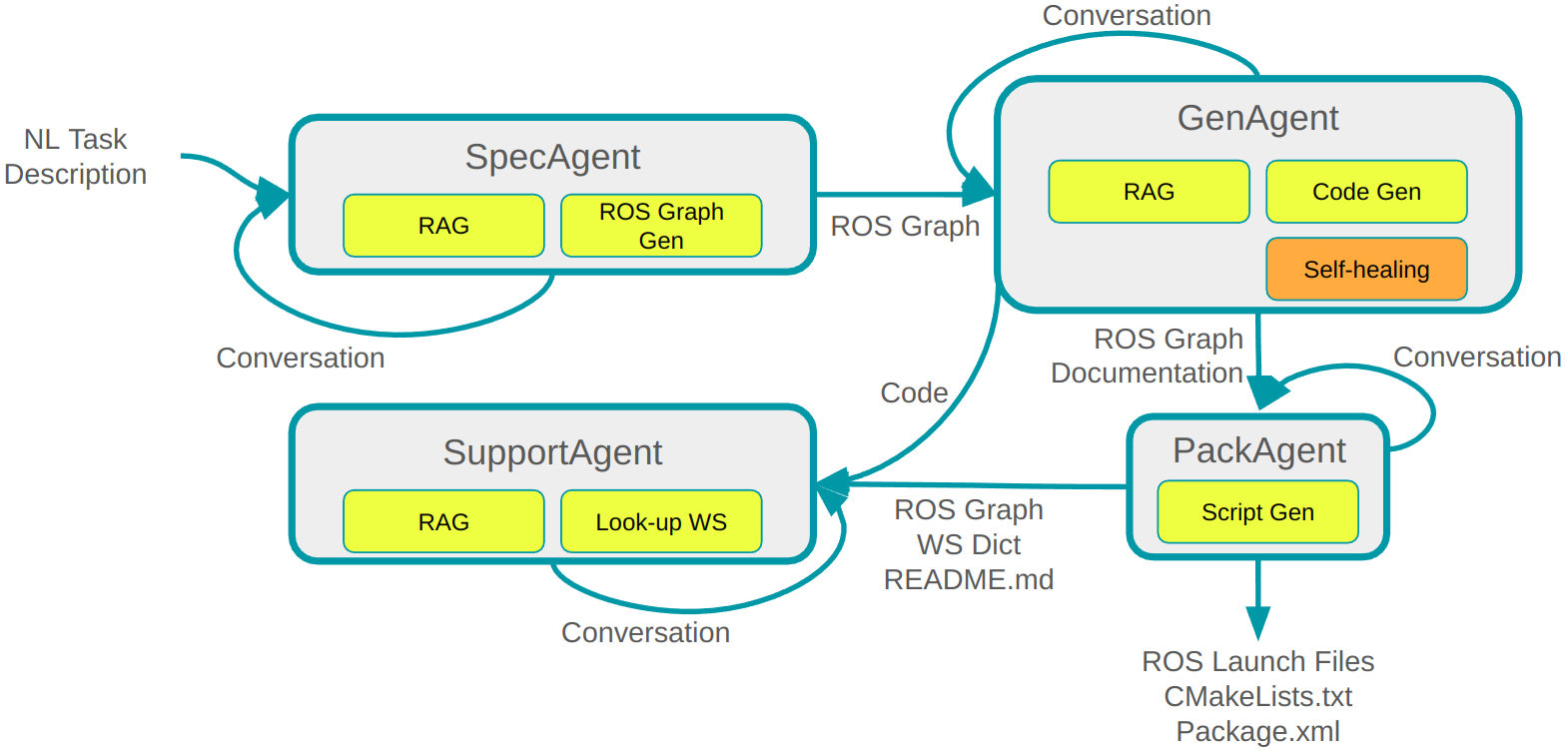
请参阅我们的Wiki页面,以了解如何在机器人项目中安装和使用Roscribe:
查看Roscribe和基于LLM的机器人平台的想法
UCSD ROS研讨会的演示幻灯片2023年10月27日
UCSD ROS研讨会演示的视频录制2023年10月27日
有关业务查询,例如咨询或承包工作,请联系[email protected]。
作为一个开源项目,我们鼓励所有机器人发烧友为Roscribe做出贡献。在每个版本中,我们将宣布新贡献者的名单。


