tacto
1.0.0
![]()
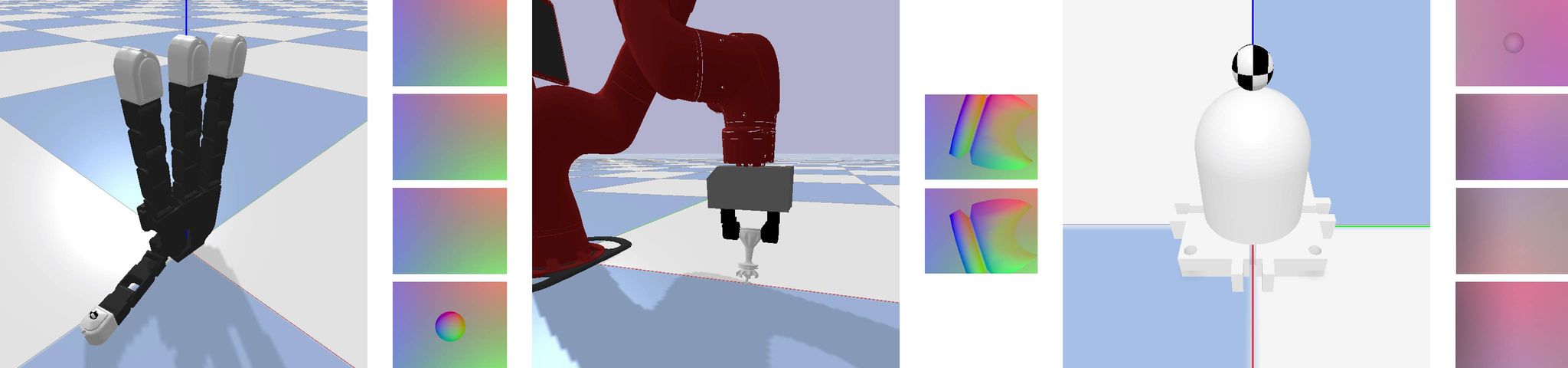
該軟體包為基於視覺的觸覺感測器(例如 DIGIT)提供了模擬器。它提供了與 PyBullet 整合的模型,以及觸控讀數的渲染器。有關更多信息,請參閱相應的論文 TACTO:用於基於高分辨率視覺的觸覺感測器的快速、靈活和開源模擬器。
注意:模擬器並不是要提供物理上精確的接觸動態(例如變形、摩擦),而是依賴現有的實體引擎。
如需更新和討論,請加入 www.touch-sensing.org 社區的 #TACTO 頻道。
首選安裝方式是透過 PyPi:
pip install tacto或者,您可以手動複製儲存庫並使用以下命令安裝套件:
git clone https://github.com/facebookresearch/tacto.git
cd tacto
pip install -e . 該軟體包包含幾個組件:
執行以下範例需要額外的軟體包(torch、gym、pybulletX)。您可以透過pip install -r requirements/examples.txt安裝它們。
有關如何將 TACTO 與 PyBullet 結合使用的基本範例,請參閱 [TBD],
有關如何僅使用渲染器引擎的範例,請查看 Examples/demo_render.py。
有關如何將模擬器與 PyBullet 一起使用的進階範例,請查看範例資料夾。
注意:渲染器需要螢幕。對於無頭渲染,請使用具有 GPU 和 CUDA 驅動程式的“EGL”模式或帶有 CPU 的“OSMESA”模式。有關更多詳細信息,請參閱 PyRender。
此外,透過以下方式安裝 PyOpenGL 的修補版本:
pip install git+https://github.com/mmatl/pyopengl.git@76d1261adee2d3fd99b418e75b0416bb7d2865e6
然後,您可以指定用於無頭渲染的引擎,例如,
import os
os.environ["PYOPENGL_PLATFORM"] = "osmesa" # osmesa cpu rendering
我們建議在Ubuntu上進行實驗。
據我們所知,對於macOS來說,pybullet.GUI 和 Pyrender 之間存在一些視覺化問題。如果可以解決,請告知我們,我們將在儲存庫中分享資訊!
該專案已獲得 MIT 許可,如 LICENSE 文件中所示。
如果您在研究中使用該項目,請引用:
@Article { Wang2022TACTO ,
author = { Wang, Shaoxiong and Lambeta, Mike and Chou, Po-Wei and Calandra, Roberto } ,
title = { {TACTO}: A Fast, Flexible, and Open-source Simulator for High-resolution Vision-based Tactile Sensors } ,
journal = { IEEE Robotics and Automation Letters (RA-L) } ,
year = { 2022 } ,
volume = { 7 } ,
number = { 2 } ,
pages = { 3930--3937 } ,
issn = { 2377-3766 } ,
doi = { 10.1109/LRA.2022.3146945 } ,
url = { https://arxiv.org/abs/2012.08456 } ,
}

