tiny cuda nn
Version 1.6
這是一個小型的、獨立的框架,用於訓練和查詢神經網路。最值得注意的是,它包含閃電般快速的「完全融合」多層感知器(技術論文)、多功能多重解析度雜湊編碼(技術論文),以及對各種其他輸入編碼、損失和優化器的支持。
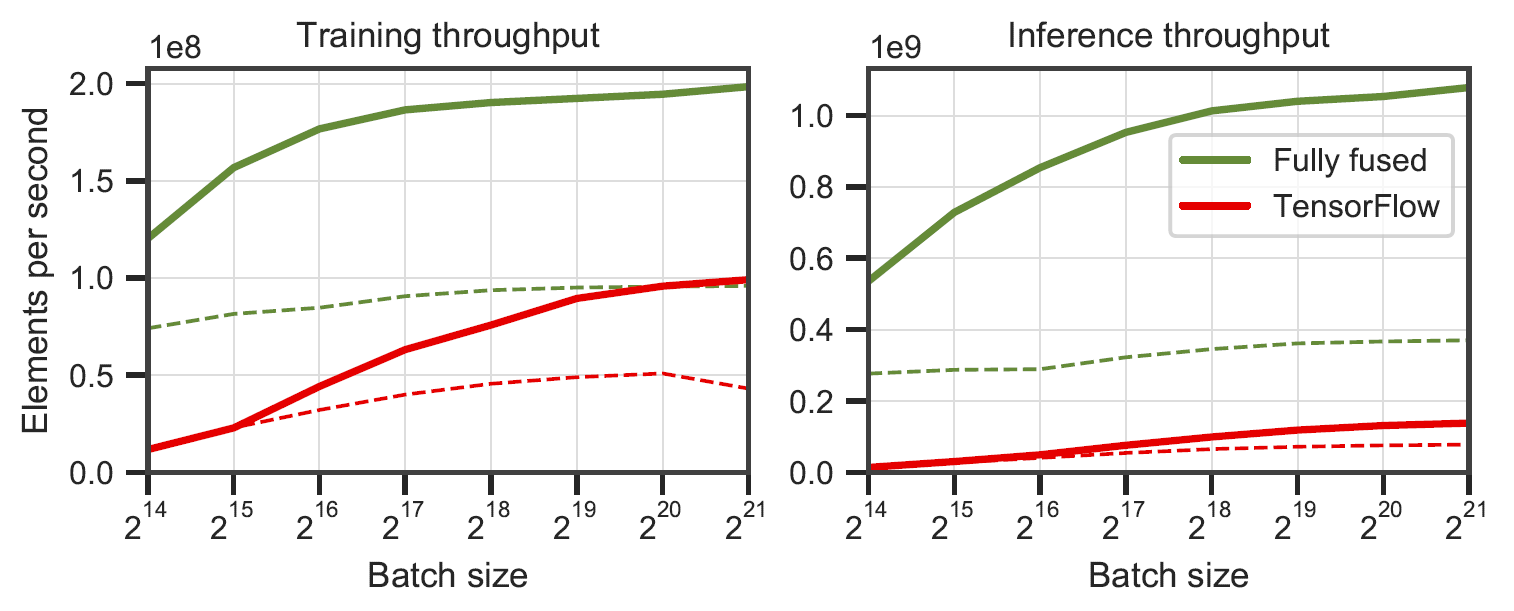 完全融合的網路與帶有 XLA 的 TensorFlow v2.5.0。在 RTX 3090 上的 64 個
完全融合的網路與帶有 XLA 的 TensorFlow v2.5.0。在 RTX 3090 上的 64 個data/config_oneblob.json實線)和 128 個( benchmarks/bench_tensorflow.py )神經benchmarks/bench_ours.cu寬多層感知器上測量。
微型 CUDA 神經網路有一個簡單的 C++/CUDA API:
# include < tiny-cuda-nn/common.h >
// Configure the model
nlohmann::json config = {
{ " loss " , {
{ " otype " , " L2 " }
}},
{ " optimizer " , {
{ " otype " , " Adam " },
{ " learning_rate " , 1e-3 },
}},
{ " encoding " , {
{ " otype " , " HashGrid " },
{ " n_levels " , 16 },
{ " n_features_per_level " , 2 },
{ " log2_hashmap_size " , 19 },
{ " base_resolution " , 16 },
{ " per_level_scale " , 2.0 },
}},
{ " network " , {
{ " otype " , " FullyFusedMLP " },
{ " activation " , " ReLU " },
{ " output_activation " , " None " },
{ " n_neurons " , 64 },
{ " n_hidden_layers " , 2 },
}},
};
using namespace tcnn ;
auto model = create_from_config(n_input_dims, n_output_dims, config);
// Train the model (batch_size must be a multiple of tcnn::BATCH_SIZE_GRANULARITY)
GPUMatrix< float > training_batch_inputs (n_input_dims, batch_size);
GPUMatrix< float > training_batch_targets (n_output_dims, batch_size);
for ( int i = 0 ; i < n_training_steps; ++i) {
generate_training_batch (&training_batch_inputs, &training_batch_targets); // <-- your code
float loss;
model. trainer -> training_step (training_batch_inputs, training_batch_targets, &loss);
std::cout << " iteration= " << i << " loss= " << loss << std::endl;
}
// Use the model
GPUMatrix< float > inference_inputs (n_input_dims, batch_size);
generate_inputs (&inference_inputs); // <-- your code
GPUMatrix< float > inference_outputs (n_output_dims, batch_size);
model.network-> inference (inference_inputs, inference_outputs);我們提供了一個範例應用程序,其中學習了圖像函數(x,y) -> (R,G,B) 。它可以透過運行
tiny-cuda-nn$ ./build/mlp_learning_an_image data/images/albert.jpg data/config_hash.json每幾個訓練步驟產生一個影像。在 RTX 4090 的預設配置下,每 1000 步驟應該花費 1 秒多一點的時間。
| 10步 | 100步 | 1000 步 | 參考圖片 |
|---|---|---|---|
 |  |  |  |
n_neurons參數或使用CutlassMLP (相容性更好但速度較慢)。如果您使用的是 Linux,請安裝以下軟體包
sudo apt-get install build-essential git我們也建議將 CUDA 安裝在/usr/local/中,並將 CUDA 安裝新增至您的 PATH 中。例如,如果您有 CUDA 11.4,請將以下內容新增至~/.bashrc
export PATH= " /usr/local/cuda-11.4/bin: $PATH "
export LD_LIBRARY_PATH= " /usr/local/cuda-11.4/lib64: $LD_LIBRARY_PATH " 首先使用以下命令克隆此存儲庫及其所有子模組:
$ git clone --recursive https://github.com/nvlabs/tiny-cuda-nn
$ cd tiny-cuda-nn然後,使用 CMake 建置專案:(在 Windows 上,這必須在開發人員命令提示字元中)
tiny-cuda-nn$ cmake . -B build -DCMAKE_BUILD_TYPE=RelWithDebInfo
tiny-cuda-nn$ cmake --build build --config RelWithDebInfo -j如果編譯莫名其妙地失敗或花費超過一個小時,則可能會耗盡記憶體。在這種情況下,請嘗試在不帶-j的情況下執行上述命令。
tiny-cuda-nn附帶 PyTorch 擴展,允許在 Python 上下文中使用快速 MLP 和輸入編碼。這些綁定比完整的 Python 實作要快得多;特別是對於多重解析度雜湊編碼。
如果批次大小很小,Python/PyTorch 的開銷仍然會很大。例如,當批次大小為 64k 時,透過 PyTorch 捆綁的
mlp_learning_an_image範例比原生 CUDA慢約 2 倍。當批量大小為 256k 或更高(預設)時,效能更加接近。
首先使用最新的、支援 CUDA 的 PyTorch 版本設定 Python 3.X 環境。然後,調用
pip install git+https://github.com/NVlabs/tiny-cuda-nn/ # subdirectory=bindings/torch或者,如果您想從tiny-cuda-nn的本機複製進行安裝,請呼叫
tiny-cuda-nn$ cd bindings/torch
tiny-cuda-nn/bindings/torch$ python setup.py install成功後,您可以使用tiny-cuda-nn模型,如下例所示:
import commentjson as json
import tinycudann as tcnn
import torch
with open ( "data/config_hash.json" ) as f :
config = json . load ( f )
# Option 1: efficient Encoding+Network combo.
model = tcnn . NetworkWithInputEncoding (
n_input_dims , n_output_dims ,
config [ "encoding" ], config [ "network" ]
)
# Option 2: separate modules. Slower but more flexible.
encoding = tcnn . Encoding ( n_input_dims , config [ "encoding" ])
network = tcnn . Network ( encoding . n_output_dims , n_output_dims , config [ "network" ])
model = torch . nn . Sequential ( encoding , network )有關範例,請參閱samples/mlp_learning_an_image_pytorch.py 。
以下是該框架的組成部分的摘要。 JSON 文件列出了設定選項。
| 網路 | ||
|---|---|---|
| 完全融合MLP | src/fully_fused_mlp.cu | 快速實現小型多層感知器 (MLP)。 |
| 彎刀MLP | src/cutlass_mlp.cu | 基於 CUTLASS 的 GEMM 例程的 MLP。比完全融合慢,但處理更大的網路並且仍然相當快。 |
| 輸入編碼 | ||
|---|---|---|
| 合成的 | include/tiny-cuda-nn/encodings/composite.h | 允許組合多種編碼。例如,可以用於組裝神經輻射快取編碼 [Müller 等人。 2021]。 |
| 頻率 | include/tiny-cuda-nn/encodings/frequency.h | NeRF 的 [Mildenhall 等人。 2020]位置編碼同樣適用於所有維度。 |
| 網格 | include/tiny-cuda-nn/encodings/grid.h | 基於可訓練的多重解析度網格的編碼。用於即時神經圖形基元 [Müller 等人。 2022]。網格可以由哈希表、密集儲存或平鋪儲存支援。 |
| 身分 | include/tiny-cuda-nn/encodings/identity.h | 保持價值觀不變。 |
| 一個斑點 | include/tiny-cuda-nn/encodings/oneblob.h | 來自神經重要性採樣 [Müller 等人。 2019] 和神經控制變數 [Müller 等人。 2020]。 |
| 球諧函數 | include/tiny-cuda-nn/encodings/spherical_harmonics.h | 一種頻率空間編碼,比分量方式更適合方向向量。 |
| 三角波 | include/tiny-cuda-nn/encodings/triangle_wave.h | NeRF 編碼的低成本替代方案。用於神經輻射緩存 [Müller 等人。 2021]。 |
| 損失 | ||
|---|---|---|
| L1 | include/tiny-cuda-nn/losses/l1.h | 標準 L1 損耗。 |
| 相對L1 | include/tiny-cuda-nn/losses/l1.h | 透過網路預測標準化的相對 L1 損失。 |
| MAPE | include/tiny-cuda-nn/losses/mape.h | 平均絕對百分比誤差 (MAPE)。與相對 L1 相同,但由目標標準化。 |
| SMAPE | include/tiny-cuda-nn/losses/smape.h | 對稱平均絕對百分比誤差 (SMAPE)。與相對 L1 相同,但透過預測和目標的平均值進行歸一化。 |
| L2 | include/tiny-cuda-nn/losses/l2.h | 標準 L2 損耗。 |
| 相對L2 | include/tiny-cuda-nn/losses/relative_l2.h | 透過網路預測標準化相對 L2 損失 [Lehtinen 等人。 2018]。 |
| 相對 L2 亮度 | include/tiny-cuda-nn/losses/relative_l2_luminance.h | 與上面相同,但透過網路預測的亮度進行歸一化。僅當網路預測為 RGB 時適用。用於神經輻射緩存 [Müller 等人。 2021]。 |
| 交叉熵 | include/tiny-cuda-nn/losses/cross_entropy.h | 標準交叉熵損失。僅當網路預測為 PDF 時適用。 |
| 變異數 | include/tiny-cuda-nn/losses/variance_is.h | 標準方差損失。僅當網路預測為 PDF 時適用。 |
| 最佳化器 | ||
|---|---|---|
| 亞當 | include/tiny-cuda-nn/optimizers/adam.h | Adam 的實作 [Kingma 和 Ba 2014],推廣到 AdaBound [Luo 等人。 2019]。 |
| 諾沃格勒 | include/tiny-cuda-nn/optimizers/lookahead.h | Novograd 的實施 [Ginsburg 等。 2019]。 |
| 新加坡元 | include/tiny-cuda-nn/optimizers/sgd.h | 標準隨機梯度下降 (SGD)。 |
| 洗髮精 | include/tiny-cuda-nn/optimizers/shampoo.h | 二階洗髮精優化器的實現 [Gupta 等人。 2018] 進行了本土最佳化以及 Anil 等人的最佳化。 [2020]。 |
| 平均的 | include/tiny-cuda-nn/optimizers/average.h | 包裝另一個最佳化器並計算最後 N 次迭代中權重的線性平均值。平均值僅用於推理(不會反饋到訓練中)。 |
| 大量 | include/tiny-cuda-nn/optimizers/batched.h | 包裝另一個優化器,在平均梯度上每 N 步調用一次嵌套優化器。與增加批次大小具有相同的效果,但僅需要恆定的記憶體量。 |
| 合成的 | include/tiny-cuda-nn/optimizers/composite.h | 允許對不同參數使用多個優化器。 |
| EMA | include/tiny-cuda-nn/optimizers/average.h | 包裝另一個最佳化器並計算權重的指數移動平均值。平均值僅用於推理(不會反饋到訓練中)。 |
| 指數衰減 | include/tiny-cuda-nn/optimizers/exponential_decay.h | 包裝另一個最佳化器並執行分段恆定指數學習率衰減。 |
| 前瞻 | include/tiny-cuda-nn/optimizers/lookahead.h | 包裝另一個優化器,實現前瞻性演算法 [Zhang 等人。 2019]。 |
該框架根據 BSD 3-clause 許可證獲得許可。詳細資訊請參閱LICENSE.txt 。
如果您在研究中使用它,我們將不勝感激
@software { tiny-cuda-nn ,
author = { M"uller, Thomas } ,
license = { BSD-3-Clause } ,
month = { 4 } ,
title = { {tiny-cuda-nn} } ,
url = { https://github.com/NVlabs/tiny-cuda-nn } ,
version = { 1.7 } ,
year = { 2021 }
}如需業務諮詢,請造訪我們的網站並提交表格:NVIDIA 研究許可
除此之外,該框架為以下出版物提供支援:
具有多重解析度雜湊編碼的即時神經圖形基元
湯瑪斯·穆勒、亞歷克斯·埃文斯、克里斯托夫·席德、亞歷山大·凱勒
ACM 圖形交易 ( SIGGRAPH ),2022 年 7 月
網站/論文/程式碼/影片/BibTeX
從影像中擷取三角形 3D 模型、材質和光照
雅各·芒克伯格、喬恩·哈塞爾格倫、沈天長、高軍、陳文正、亞歷克斯·埃文斯、托馬斯·穆勒、Sanja Fidler
CVPR(口頭) ,2022 年 6 月
網址/論文/影片/BibTeX
用於路徑追蹤的即時神經輻射緩存
湯瑪斯·穆勒、法布里斯·魯塞爾、揚·諾瓦克、亞歷山大·凱勒
ACM 圖形交易 ( SIGGRAPH ),2021 年 8 月
論文 / GTC 演講 / 影片 / 互動式結果檢視器 / BibTeX
以及以下軟體:
NerfAcc:通用 NeRF 加速工具箱
李瑞龍、Matthew Tancik、Angjoo Kanazawa
https://github.com/KAIR-BAIR/nerfacc
Nerfstudio:神經輻射場開發框架
Matthew Tancik*、Ethan Weber*、Evonne Ng*、李瑞龍、Brent Yi、Terrance Wang、Alexander Kristoffersen、Jake Austin、Kamyar Salahi、Abhik Ahuja、David McAllister、Angjoo Kanazawa
https://github.com/nerfstudio-project/nerfstudio
如果您的出版品或軟體未列出,請隨時提出拉取請求。
特別感謝 NRC 作者的有益討論,感謝 Nikolaus Binder 提供該框架的部分基礎設施,以及在利用 CUDA 內的 TensorCore 方面提供的幫助。


