carma platform
carma-system-4.5.0
| DockerHub 映像建置 | 單元測試工作流程 | 聲納代碼質量 |
|---|---|---|
 |  |

CARMA SM推進研究和開發,以加速協作駕駛自動化的市場準備和部署,同時推進自動駕駛技術的安全、保障、數據和人工智慧。它鼓勵工程師和研究人員社群的協作和參與,以利用開源軟體 (OSS) 和敏捷專案管理實踐來加深對協作駕駛自動化的理解。
CARMA 是一個可重複使用、可擴展的平台,用於控制 SAE 2 級連網自動駕駛車輛 (AV)。它為第三方插件提供了豐富的通用 API,可實現車輛引導演算法來規劃車輛軌跡。它是用 C++ 編寫的,運行在 Ubuntu 上的機器人作業系統 (ROS) 環境中。該平台可在各種配備適當的車輛上重複使用。已開始從 ROS 1 框架遷移到 ROS 2。
本自述文件更新日期:2020 年 10 月 23 日
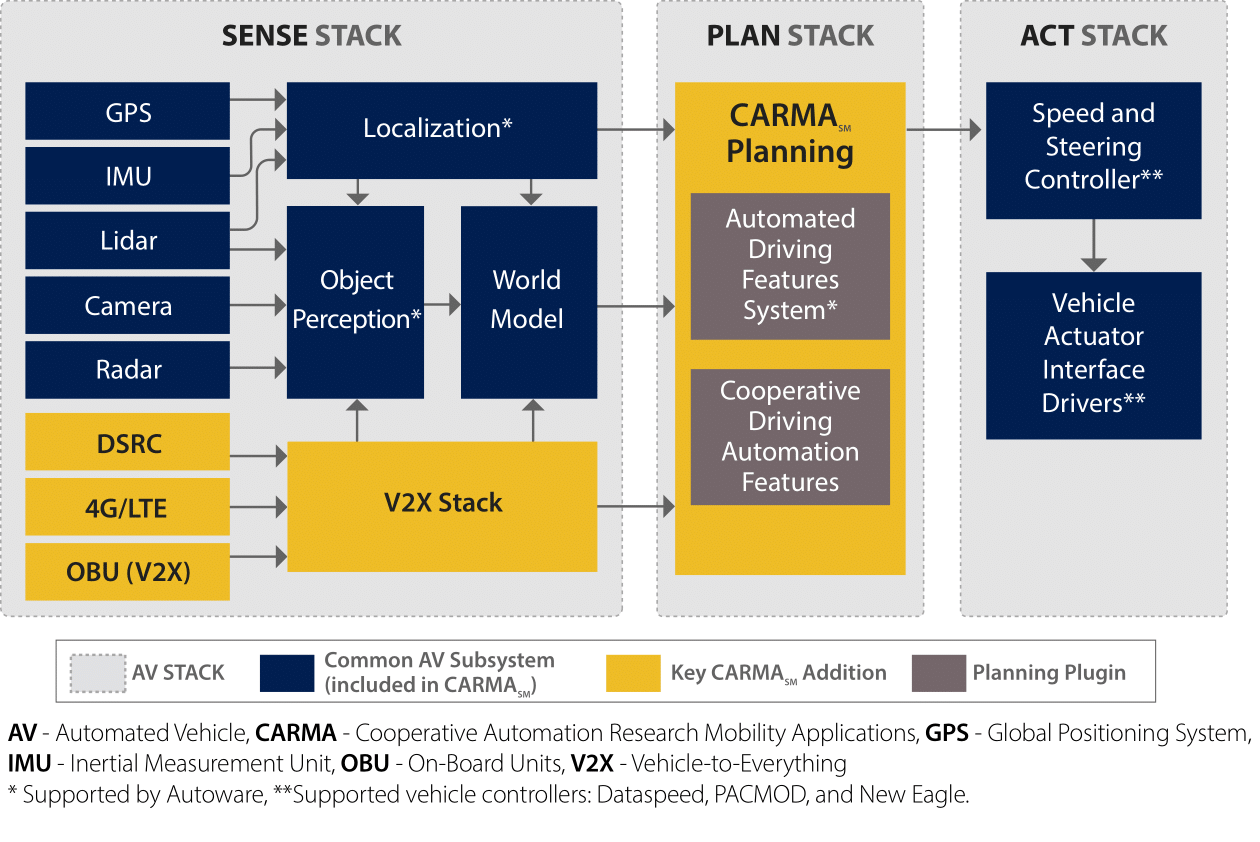
管理自動車輛運動涉及三個方面。第一個是導航,也稱為定位,它是確定車輛當前相對於地球以及相對於所需行駛路徑(其計劃路線)的位置的行為。第二個是引導,也稱為軌跡規劃,其中包括確定車輛如何從目前位置移動到目的地的過程。目的地和路線將交給引導演算法,然後它們確定需要如何隨時調整車輛的運動以遵循路線。自動車輛運動的第三個方面是控制,它涵蓋了車輛物理設備的驅動以引起運動變化(對於陸地車輛來說,這些通常導致車輪旋轉得更快或更慢並轉動方向盤)。因此,導航方案成為引導功能的輸入,並且引導方案成為控制功能的輸入。當車輛移動時,其位置顯然會發生變化,因此導航功能需要不斷更新其解決方案,並且循環會根據需要快速迭代,以產生平穩且準確的車輛運動。迭代速率很大程度取決於車輛的預期速度。
CARMA平台為其主車輛提供導航和引導功能,以及一些控制功能。它依賴低階控制器硬體來提供其餘的控制功能。目前版本的 CARMA 平台提供 SAE 3+ 級自主性,具有速度和轉向控制功能。

CARMA 平台的設定、操作和設計文件可以在專案 Confluence 頁面上找到。其他文件可以在 Doxygen 原始碼文件頁面上找到。
CARMA 軟體平台的當前版本和發布歷史:CARMA 發行說明
儲存庫結構注意:此儲存庫的 master 和開發分支(以及 usdot-fhwa-stol GitHub 組織中的所有其他儲存庫)現在反映了第三代 CARMA 程式碼和文檔,稱為 CARMA3。它使用 Autoware 提供 SAE 2 級和 3 級自動化功能。舊版 CARMA2 代碼仍受支援。 2018 年,它被 FHWA 廣泛用於 SAE 1 級實驗。要使用程式碼庫,請查看 CARMA2 整合分支並向其發出拉取請求(使用下面概述的貢獻流程)。
ROS 版本說明: 3.11 版是 CARMA 平台的最終版本,僅包含 ROS1 程式碼。開發分支和未來版本將在混合系統中包含 ROS1 和 ROS2 程式碼的混合,直到所有程式碼完全移植到 ROS2。您可以在此處了解有關該系統以及 confluence 上 ROS2 遷移工作的更多資訊:CARMA Platform ROS2 Docs
目前CARMA生態系統的發展方向和發布計劃可以在這裡找到:CARMA Roadmap
目前的 CARMA 平台系統作為 ROS 1 Noetic 和 ROS 2 Foxy 組件的混合體運作。雖然幾乎所有元件都已升級到 ROS 2 Foxy,但係統中仍存在少量 ROS 1 Noetic 內容,包括此儲存庫中的一些軟體包。有關更多信息,請參閱 carma-config 存儲庫中的相關文件。
該文件描述了單一 CARMA 車輛內的軟體架構。可能有多個此類車輛協同運行,透過 DSRC 或蜂窩方式相互通訊。他們還可以使用 DSRC 或蜂窩網路與路邊基礎設施進行通訊。然而,單一車輛內的軟體元件之間的通訊主要是透過機器人作業系統(ROS)框架完成的。相鄰車輛之間沒有 ROS 通訊。 CARMA3系統架構
有關CARMA2架構的信息,請參閱CARMA2系統架構
請參閱詳細設計文件頁面,以了解 CARMA 的詳細設計規格和其他附加資訊。詳細設計頁面
有關 CARMA 平台開發環境設定的有用開發文件和說明可在以下頁面找到:
CARMA3 插件開發人員指南即將推出。
有關為 CARMA2 開發插件的方法的描述,請參閱 CARMA 2.7 開發人員指南
CARMA3 的使用者指南即將推出。
有關凱迪拉克 SRX 上 CARMA2 特定功能的說明,請參閱 CARMA 使用者指南
CARMA3 管理員指南即將推出。
有關 CARMA2 的管理信息,包括安裝和運行 CARMA 平台所需的車輛和開發人員 PC 配置、建置、部署和測試步驟,請參閱管理員指南
CARMA Platform SM是一個可下載的開源軟體 (OSS) 平台,其架構可擴展和可重複使用,可用於各種研究目的,以推進協作駕駛自動化的創新。它可以實現車輛、行人、騎自行車者和踏板車等道路使用者以及能夠通訊的基礎設施設備之間的通訊。它促進工程師和研究人員社群之間的合作,以加速協作駕駛自動化的開發、測試和評估,同時推進自動駕駛技術中人工智慧的安全、保障、數據和使用。
CARMA 平台作為託管在單獨的 Github 儲存庫中的一組多個獨立套件進行分發。這些軟體包有助於 CARMA 平台在不同的硬體配置下運行,或允許其支援不同的操作模式。要在 CARMA 平台系統的建置中包含這些套件之一,請將 Github 儲存庫複製到與此儲存庫相同的 Catkin 工作區src/資料夾中。 Catkin 建置系統將驗證依賴項是否已正確解析,並在您下次執行catkin_make時建置新包含的套件。 CARMA3 可用軟體包的不完整清單包括:
可用軟體包的完整清單可以在 USDOT FHWA STOL Github 組織中找到。
CARMA Cloud SM是一種可下載、基於雲端的開源軟體 (OSS) 服務,可提供支援和實現協作駕駛自動化的資訊。它可以與雲端服務和車輛、行人、騎自行車者和踏板車等道路使用者以及能夠通訊的基礎設施設備進行通訊。它促進工程師和研究人員社群之間的合作,以加速協作駕駛自動化的開發、測試和評估,同時推進自動駕駛技術中人工智慧的安全、保障、數據和使用。 CARMA Cloud 的原始碼可以在 GitHub 上找到。
歡迎來到 CARMA 貢獻指南。請閱讀本指南,了解我們的開發流程、如何提出拉取請求和改進,以及如何建置和測試對此專案的變更。 CARMA 貢獻指南
請閱讀我們的 CARMA 行為準則,其中概述了我們對 CARMA 社區參與者的期望,以及報告不可接受行為的步驟。我們致力於為所有人提供一個熱情好客、鼓舞人心的社區,並期望我們的行為準則得到遵守。任何違反此行為準則的人都可能被禁止進入社區。
開發團隊衷心感謝對此儲存庫中的設計和程式碼做出直接貢獻的人員。 CARMA 歸因
透過向聯邦公路管理局 (FHWA) 連接自動化研究行動應用程式 (CARMA) 做出貢獻,即表示您同意您的貢獻將根據其 Apache License 2.0 許可證獲得許可。卡瑪許可證
機構:交通部
簡短描述:合作自動化研究行動應用程式 (CARMA) 是一個開源軟體 (OSS) 平台,運行在車輛內部的電腦上,電腦與車輛設備進行交互,以實現協作式自動車輛研究、開發和測試。然後,電腦為車輛提供與基礎設施和其他車輛互動和合作所需的資訊。驅動系統(CADS)。第一階段還透過將現有應用程式和新車型(重型卡車)整合到 CARMA 車隊中,開發了綜合公路原型 (IHP)。以下五個應用是主要研究領域:(1) 車輛編隊行駛,(2) 號誌交叉口接近和離開,(3) 基礎設施引導速度協調,(4) 協作變換車道,以及(5) 協作匝道合併。第二階段該計畫將推進 CADS,該系統是在 FHWA 的 CARMA 研究平台上開發的,用於測試仲裁和談判策略。最終,該項目將提高基礎設施效率並減少交通擁堵。該專案的目標之一是透過與產業和利害關係人的開源協作,加速合作車輛應用的技術轉移和部署。該專案將實現工程師協會 (SAE) 2 級和 3 級 (L2/3) 輕型車輛測試能力,並開發一支由四輛 SAE L2/3 重型車輛組成的車隊。該專案還將圍繞自動駕駛技術的使用開發運輸系統管理和營運(TSMO)的高級概念。此外,該專案將確定交通事故管理 (TIM) 場景,為與 ADS 互動和使用 ADS 的急救人員用例提供策略改進和新策略。新的 FHWA 車隊將用於為以下每個用例類別製作場景原型:(1) 基本旅行、(2) 工作區、(3) 交通事故管理和 (4) 天氣。這些測試將提供客觀數據,讓利害關係人了解 ADS 的影響以及使用 ADS 改進營運的可能策略。
狀態:測試版
標籤: 交通運輸、 協同駕駛自動化、 互聯車輛、 智慧交通系統、 C++、 java、 python、 docker
工時:200
聯絡人姓名: James Lieu
聯絡電話:(202) 366-3000
請點選下面的 CARMA 標誌造訪聯邦公路管理局 (FHWA) CARMA 網站。如需了解更多信息,請聯繫 [email protected]。

如需 CARMA 團隊的技術支持,請透過 [email protected] 聯絡 CARMA 服務台。


